![]() Caja de herramientas para profesores
-
Esquema de actividades
Caja de herramientas para profesores
-
Esquema de actividades
-
Esta exploración presentará a los estudiantes los comportamientos básicos de programación de avance, retroceso y espera. Estas habilidades básicas les ayudarán a tener éxito en la siguiente actividad y en el Strike Challenge al final de este STEM Lab, cuando competirán en bolos usando el Speedbot.
-
El uso del proyecto de plantilla V5 Speedbot (Drivetrain 2-motors, No Gyro) permite a los estudiantes programar el Speedbot para avanzar simplemente seleccionando el bloque [Drive for] .
¡El Speedbot está listo para moverse!
Esta exploración le brindará las herramientas para poder comenzar a crear algunos proyectos interesantes para que los siga su Speedbot.
-
VEXcode V5 que se utilizará en esta exploración:
-
Para obtener más información sobre el bloque, abra Ayuda y luego seleccione el bloque [Drive for] .

-
Asegúrese de tener el hardware necesario, su cuaderno de ingeniería y VEXcode V5 descargados y listos.
![]() Consejos para profesores
Consejos para profesores
Si es la primera vez que el estudiante utiliza VEXcode V5, puede consultar los tutoriales en cualquier momento durante esta exploración. Los tutoriales se encuentran en la barra de herramientas.

| Cantidad | Materiales necesitados |
|---|---|
| 1 |
robot velocista |
| 1 |
Batería de robot cargada |
| 1 |
Código VEX V5 |
| 1 |
Cable USB (si usa una computadora) |
| 1 |
Cuaderno de ingeniería |
![]() Consejos para profesores
Consejos para profesores
-
Modele cada uno de los pasos de solución de problemas para los estudiantes.
Paso 1: Preparándose para la Exploración
Antes de comenzar la actividad, ¿tienes listo cada uno de estos elementos? Marque cada uno de los siguientes:
-
¿Están los motores conectados a los puertos correctos?
-
¿Están los cables inteligentes completamente insertados en todos los motores?
-
¿Está el Cerebro encendido?
Paso 2: Iniciar un nuevo proyecto
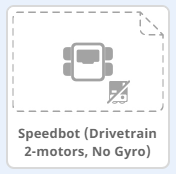
Antes de comenzar su proyecto, seleccione el proyecto de plantilla Speedbot (Drivetrain 2-Motors, No Gyro). El proyecto de plantilla contiene la configuración del motor del Speedbot. Si no se utiliza la plantilla, su robot no ejecutará el proyecto correctamente.
Complete los siguientes pasos:
-
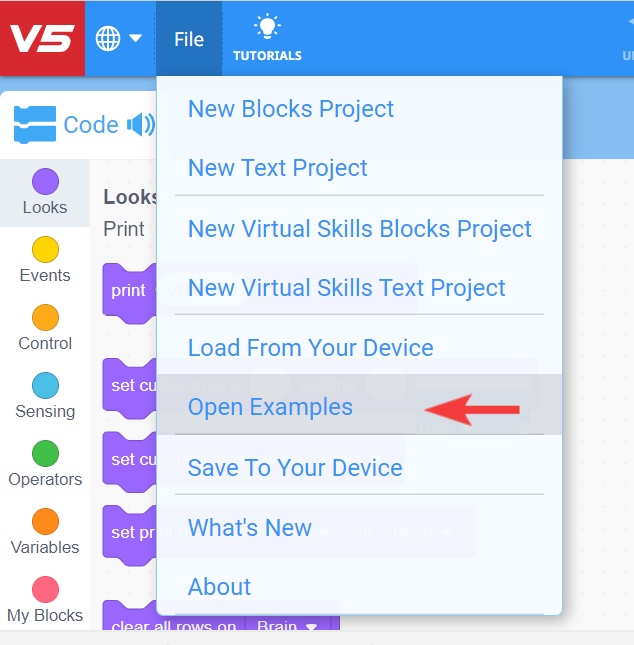
Abra el menú Archivo.
-
Seleccionar Abrir Ejemplos.
-
Seleccione y abra el proyecto de plantilla Speedbot (Drivetrain 2-motors, No Gyro).
-
Dado que usaremos el bloque [Drive for] , cambie el nombre de su proyecto Drive.
-
Guarda tu proyecto.
-
Verifique que el nombre del proyecto Drive esté ahora en la ventana en el centro de la barra de herramientas.

![]() Consejos para profesores
Consejos para profesores
-
Dado que se trata de una actividad inicial con la programación, el profesor debe modelar los pasos y luego pedir a los estudiantes que completen las mismas acciones. Luego, el maestro debe monitorear a los estudiantes para asegurarse de que estén siguiendo los pasos correctamente.
-
Asegúrese de que los estudiantes hayan seleccionado Abrir ejemplos en el menú Archivo.
-
Asegúrese de que los estudiantes hayan seleccionado el proyecto de plantilla Speedbot (Drivetrain 2-motors, No Gyro).
Puede indicarles a los estudiantes que hay varias selecciones para elegir en la página Abrir Ejemplos . A medida que construyan y utilicen otros robots, tendrán la oportunidad de utilizar diferentes plantillas.
-
Puede pedirles a los estudiantes que agreguen sus iniciales o el nombre de su grupo al nombre del proyecto. Esto ayudará a diferenciar los proyectos si les pide a los estudiantes que los envíen.
![]() Caja de herramientas para profesores
Caja de herramientas para profesores
Señale que cuando abrieron VEXcode V5 por primera vez, la ventana tenía la etiqueta VEXcode Proyecto y no se guardó (indicado en la barra de herramientas). VEXcode Project es el nombre del proyecto predeterminado cuando se abre VEXcode V5 por primera vez. Una vez que se cambió el nombre del proyecto Unidad y se guardó, la pantalla se actualizó a Guardado. Usando esta ventana en la barra de herramientas, es fácil verificar que los estudiantes estén usando el proyecto correcto y que esté guardado.
Una vez que se guarda inicialmente un proyecto, VEXcode V5 guarda automáticamente cualquier cambio posterior, como lo indica el mensaje junto al nombre del proyecto.
Dígales a los estudiantes que ahora están listos para comenzar su primer proyecto. Explique a los estudiantes que con solo seguir unos sencillos pasos, podrán crear y ejecutar un proyecto que hará avanzar al Speedbot.
![]() Caja de herramientas para docentes
-
Parar y discutir
Caja de herramientas para docentes
-
Parar y discutir
Este es un buen momento para hacer una pausa y hacer que los estudiantes revisen los pasos que acaban de completar al iniciar un nuevo proyecto en VEXcode V5 de forma individual o en grupos. Pida a los estudiantes que reflexionen individualmente antes de compartir con su grupo o con toda la clase.
Paso 3: seguir adelante
-
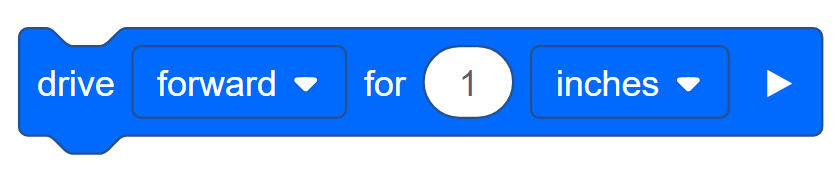
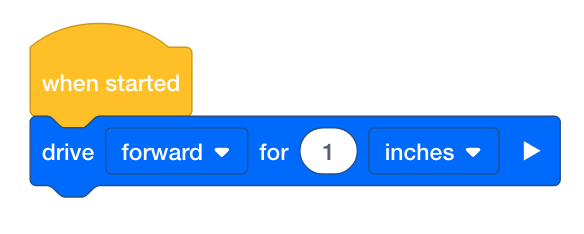
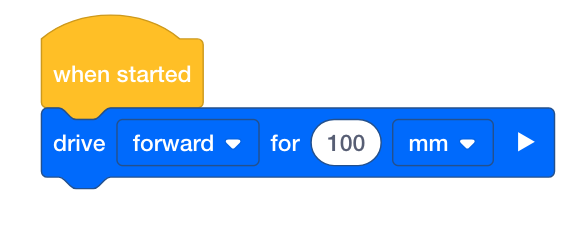
Agregue el bloque [Drive for] al bloque {When started} en el área de programación.

-
Seleccione el menú desplegable y cambie las unidades de pulgadas a milímetros.
-
Cambie la distancia de 1 mm a 100 mm.

-
Haga clic en el icono Ranura . Puede descargar su proyecto en una de las cuatro ranuras disponibles en Robot Brain. Haga clic en el número 1.

-
Conecte el robot a su computadora o tableta. El ícono del Cerebro en la barra de herramientas se vuelve verde una vez que se ha realizado una conexión exitosa.

-
Haga clic en el botón Descargar en la barra de herramientas para descargar el proyecto Drive al Robot Brain.
![]() Teacher Toolbox
-
Ayuda con bloques
Teacher Toolbox
-
Ayuda con bloques
-
Señalar que en el área de programación ya existe un bloque al iniciar ubicado ahí por defecto. Cada proyecto comenzará con este bloque. Cuando se inicie el proyecto, los bloques conectados se seguirán en la secuencia en la que se colocaron.
Demuestre hacer clic en la unidad para el bloque y arrastrarla al área de programación, conectándola al bloque {When started}. Escuchará un clic cuando se conecte.
-
Si está usando una computadora, el estudiante debe tener VEX V5 Robot Brain conectado a la computadora usando un cable USB . Si está utilizando una tableta, el VEX V5 Robot Brain debe conectarse a la tableta mediante Smart Radio.
-
Si los estudiantes están usando una computadora, pídales que desconecten el cable USB del Robot Brain. Tener el robot conectado a una computadora mientras ejecuta un proyecto podría hacer que el robot tire del cable de conexión.
![]() Caja de herramientas para docentes
-
Parar y discutir
Caja de herramientas para docentes
-
Parar y discutir
Pida a los estudiantes que predigan qué creen que sucederá cuando este proyecto se descargue y se ejecute en el Speedbot. Dígales a los estudiantes que registren sus predicciones en sus cuadernos de ingeniería. Si el tiempo lo permite, pida a cada grupo que comparta su predicción.

![]() Caja de herramientas para profesores
-
modelo primero
Caja de herramientas para profesores
-
modelo primero
Modele cómo ejecutar el proyecto frente a la clase antes de que todos los estudiantes lo intenten a la vez. Reúna a los estudiantes en un área y deje suficiente espacio para que se mueva el Speedbot si está colocado en el piso.
Dígales a los estudiantes que ahora es su turno de ejecutar su proyecto. Asegúrate de que tengan un camino despejado y que ningún Speedbots choque entre sí.
- Ejecute el proyecto en el robot Speedbot asegurándose de que el proyecto esté seleccionado y luego presione el botón Ejecutar en Robot Brain. ¡Felicitaciones por crear su primer proyecto!

![]() Caja de herramientas para profesores
-
Completando el paso 4
Caja de herramientas para profesores
-
Completando el paso 4
-
Para cambiar el bloque [Conducir para] de adelante a atrás, simplemente haga clic en el menú desplegable y seleccione atrás.
-
Se puede cambiar el número de mm, pero para este ejemplo los dejaremos en 100 mm como se estableció en el paso anterior.
-
Si los estudiantes están usando una computadora, pídales recordarles que desconecten el cable USB de Robot Brain antes de ejecutar el proyecto.
-
Debido a que no estamos seleccionando una nueva ranura, el nuevo proyecto se descargará en la ranura 1 y reemplazará el proyecto anterior.
-
Dado que VEXcode V5 tiene guardado automático, no es necesario volver a guardar el proyecto.
Paso 5: Espere y luego conduzca en reversa

-
Agregue un bloque [Esperar] antes del bloque [Conducir para] . Esto le indicará al robot que espere antes de dar marcha atrás.
-
Inserte tres segundos en el bloque [Espera] . Esto le indica al robot que espere tres antes de dar marcha atrás.
-
Descargar el proyecto.
-
Ejecute el proyecto en el robot Speedbot asegurándose de que el proyecto esté seleccionado y luego presione el botón Ejecutar.
![]() Caja de herramientas para profesores
-
Completando el paso 5
Caja de herramientas para profesores
-
Completando el paso 5
-
Se puede colocar un bloque [Esperar] en cualquier parte del proyecto. Para obtener más información sobre el bloque [Esperar] , abra la Ayuda .
-
El uso de un bloque [Esperar] no finalizará el proyecto.
-
Si los estudiantes están usando una computadora, pídales recordarles que desconecten el cable USB de Robot Brain antes de ejecutar el proyecto.
-
Debido a que no estamos seleccionando una nueva ranura, el nuevo proyecto se descargará en la ranura 1 y reemplazará el proyecto anterior.
-
Dado que VEXcode V5 tiene guardado automático, no es necesario volver a guardar el proyecto.
Paso 6: ¡Completa el desafío de ejercicios de baloncesto!
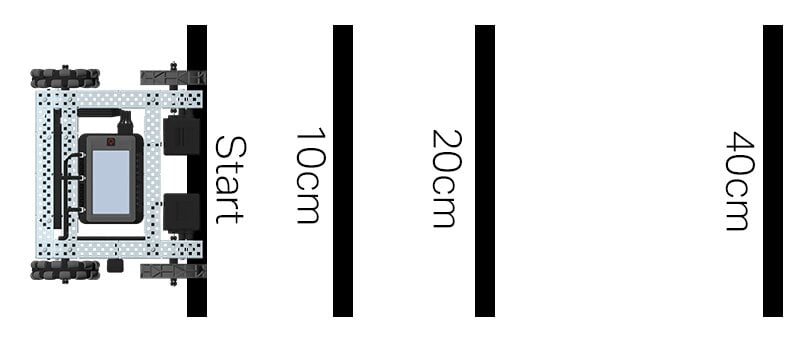
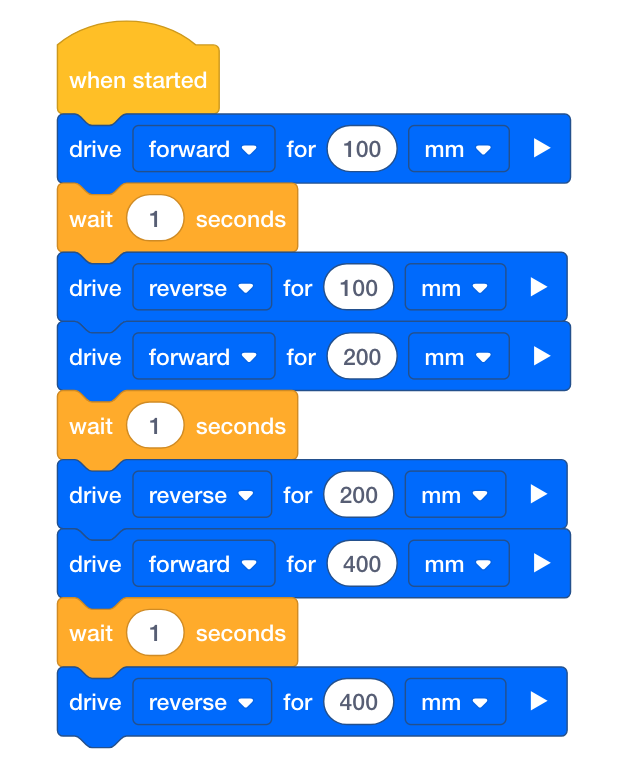
En Basketball Drills Challenge, el robot debe poder navegar por una serie de líneas a diferentes distancias. El robot avanzará hasta la primera línea que está a 10 cm de la posición inicial, esperará 1 segundo y luego retrocederá regresando a esa misma línea. Luego, el robot repetirá la acción avanzando 20 cm hasta la segunda línea, esperará 1 segundo y luego retrocederá hasta la línea de salida original. El robot avanzará hasta la tercera línea con una distancia de 40 cm, esperará 1 segundo y finalmente regresará a la línea de salida para terminar el desafío.
Antes de programar el robot, planifique la trayectoria y el comportamiento del robot en su cuaderno de ingeniería.
Después de completar el Desafío de baloncesto, podrás combinar movimientos hacia adelante y hacia atrás con comportamientos de robot adicionales para completar desafíos aún más avanzados.
Tenga en cuenta al programar que 1 cm = 10 mm
![]() Caja de herramientas para docentes
-
Parar y discutir
Caja de herramientas para docentes
-
Parar y discutir
Pida a los estudiantes que compartan sus soluciones en parejas antes de discutirlas con toda la clase. Facilite la discusión preguntando:
-
¿Enfrentó alguna dificultad al programar este desafío?
-
¿Tu robot se comportó como esperabas según tu proyecto? ¿Por qué o por qué no?
-
Si pudieras repetir el desafío, ¿hay algo que habrías hecho diferente?
![]() Consejos para profesores
Consejos para profesores
Valide que el robot haya completado con éxito el desafío utilizando un metro o una regla y cinta adhesiva para marcar una posición inicial para el robot. Luego marque 10 mm, 20 mm y 40 mm desde esa posición inicial como referencia hacia dónde debe moverse el robot para completar el desafío.
![]() Caja de herramientas para profesores
-
Solución
Caja de herramientas para profesores
-
Solución
Puede encontrar una rúbrica de programación para evaluar a los estudiantes aquí (Google / .docx / .pdf). Puede encontrar una rúbrica para evaluar los cuadernos de ingeniería en equipo aquí (Google / .docx / .pdf), y una rúbrica para evaluar los cuadernos individuales aquí (Google / .docx / . pdf). Siempre que planee evaluar el trabajo de un estudiante con una(s) rúbrica(s), asegúrese de compartir la rúbrica con ellos antes de que comiencen a trabajar en el proyecto.