![]() กล่องเครื่องมือครู
-
โครงร่างกิจกรรม
กล่องเครื่องมือครู
-
โครงร่างกิจกรรม
-
การสำรวจนี้จะแนะนำให้นักเรียนรู้จักพฤติกรรมพื้นฐานของการขับเคลื่อนไปข้างหน้า ถอยหลัง และการเขียนโปรแกรมแบบรอ ทักษะพื้นฐานเหล่านี้จะช่วยให้พวกเขาประสบความสำเร็จในกิจกรรมต่อไปและใน Strike Challenge ที่ส่วนท้ายของ STEM Lab นี้ ซึ่งพวกเขาจะแข่งขันโบว์ลิ่งโดยใช้ Speedbot
-
การใช้โปรเจ็กต์เทมเพลต V5 Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) ช่วยให้นักเรียนสามารถตั้งโปรแกรมให้ Speedbot ก้าวไปข้างหน้าโดยเลือกบล็อก [ขับเคลื่อนสำหรับ]
Speedbot พร้อมเคลื่อนที่แล้ว!
การสำรวจนี้จะให้เครื่องมือแก่คุณในการเริ่มสร้างโปรเจ็กต์เจ๋งๆ ให้ Speedbot ของคุณทำตาม
-
VEXcode V5 ที่จะใช้ในการสำรวจนี้:
-
หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับบล็อก ให้เปิดบล็อก Help จากนั้นเลือกบล็อก [Drive for]

-
ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น ดาวน์โหลดโน้ตบุ๊กวิศวกรรม และ VEXcode V5 และพร้อมใช้งานแล้ว
![]() เคล็ดลับของครู
เคล็ดลับของครู
หากนี่เป็นครั้งแรกของนักเรียนที่ใช้ VEXcode V5 พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาระหว่างการสำรวจนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ

| ปริมาณ | วัสดุที่จำเป็น |
|---|---|
| 1 |
หุ่นยนต์สปีดบอท |
| 1 |
แบตเตอรี่หุ่นยนต์ที่ชาร์จแล้ว |
| 1 |
VEXโค้ด V5 |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรมศาสตร์ |
![]() เคล็ดลับของครู
เคล็ดลับของครู
-
จำลองขั้นตอนการแก้ปัญหาแต่ละขั้นตอนให้กับนักเรียน
ขั้นตอนที่ 2: เริ่มโครงการใหม่
ก่อนที่คุณจะเริ่มโปรเจ็กต์ ให้เลือกโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) โปรเจ็กต์เทมเพลตประกอบด้วยการกำหนดค่ามอเตอร์ของ Speedbot หากไม่ได้ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถดำเนินโครงการได้อย่างถูกต้อง
ทำตามขั้นตอนต่อไปนี้:
-
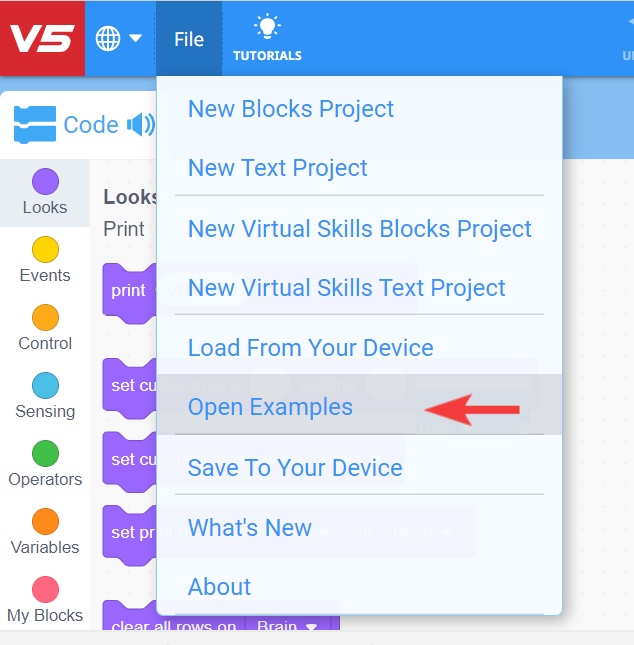
เปิดเมนูไฟล์
-
เลือก เปิด ตัวอย่าง
-
เลือกและเปิดโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร)
-
เนื่องจากเราจะใช้บล็อก [ไดรฟ์สำหรับ] ให้เปลี่ยนชื่อไดรฟ์โครงการของคุณ
-
บันทึก โครงการของคุณ
-
ตรวจสอบเพื่อให้แน่ใจว่าชื่อโปรเจ็กต์ Drive อยู่ในหน้าต่างตรงกลางของแถบเครื่องมือ

![]() เคล็ดลับของครู
เคล็ดลับของครู
-
เนื่องจากนี่เป็นกิจกรรมเริ่มต้นของการเขียนโปรแกรม ครูควรจำลองขั้นตอนต่างๆ แล้วขอให้นักเรียนทำแบบเดียวกันให้เสร็จสิ้น จากนั้นครูควรติดตามนักเรียนเพื่อให้แน่ใจว่าพวกเขาทำตามขั้นตอนอย่างถูกต้อง
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือก Open Examples จากเมนู File
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร)
คุณสามารถชี้ให้นักเรียนเห็นว่ามีหลายตัวเลือกให้เลือกในหน้า เปิด ตัวอย่าง ขณะที่พวกเขาสร้างและใช้หุ่นยนต์ตัวอื่น พวกเขาจะมีโอกาสใช้เทมเพลตที่แตกต่างกัน
-
คุณสามารถขอให้นักเรียนเพิ่มชื่อย่อหรือชื่อกลุ่มลงในชื่อโปรเจ็กต์ได้ ซึ่งจะช่วยแยกแยะโปรเจ็กต์ต่างๆ หากคุณขอให้นักเรียนส่ง
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
ชี้ให้เห็นว่าเมื่อพวกเขาเปิด VEXcode V5 เป็นครั้งแรก หน้าต่างจะมีป้ายกำกับ VEXcode Project และไม่ได้รับการบันทึก (ระบุไว้บนแถบเครื่องมือ) โครงการ VEXcode เป็นชื่อโครงการเริ่มต้นเมื่อเปิด VEXcode V5 ครั้งแรก เมื่อเปลี่ยนชื่อโปรเจ็กต์เป็น Drive และบันทึกแล้ว จอแสดงผลจะอัปเดตเป็น Saved การใช้หน้าต่างนี้ในแถบเครื่องมือทำให้ง่ายต่อการตรวจสอบว่านักเรียนใช้โปรเจ็กต์ที่ถูกต้องและได้รับการบันทึกไว้แล้ว
เมื่อโปรเจ็กต์ได้รับการบันทึกในขั้นต้น VEXcode V5 จะบันทึกการเปลี่ยนแปลงใดๆ ที่ตามมาโดยอัตโนมัติ ตามที่ระบุไว้ในข้อความถัดจากชื่อโปรเจ็กต์
บอกนักเรียนว่าพวกเขาพร้อมที่จะเริ่มโครงงานแรกแล้ว อธิบายให้นักเรียนฟังว่าเพียงทำตามขั้นตอนง่ายๆ ไม่กี่ขั้นตอน ก็จะสามารถสร้างและดำเนินโครงการที่จะขับเคลื่อน Speedbot ไปข้างหน้าได้
![]() กล่องเครื่องมือครู
-
หยุดและอภิปราย
กล่องเครื่องมือครู
-
หยุดและอภิปราย
นี่เป็นจุดที่ดีที่จะหยุดชั่วคราวและให้นักเรียนทบทวนขั้นตอนที่เพิ่งเสร็จสิ้นในการเริ่มโปรเจ็กต์ใหม่ใน VEXcode V5 เป็นรายบุคคลหรือเป็นกลุ่ม ขอให้นักเรียนไตร่ตรองเป็นรายบุคคลก่อนแบ่งปันภายในกลุ่มหรือกับทั้งชั้นเรียน
ขั้นตอนที่ 3: ขับไปข้างหน้า
-
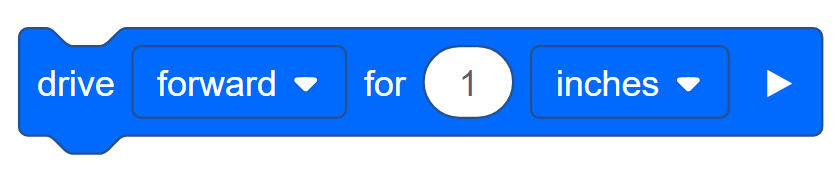
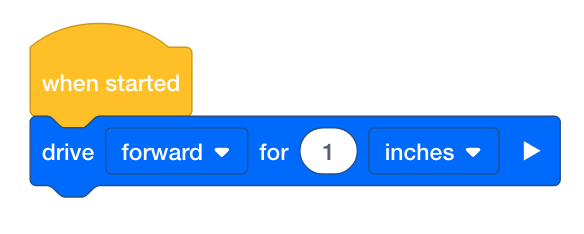
เพิ่มบล็อก [ขับเคลื่อนสำหรับ] ให้กับบล็อก {When started} ในพื้นที่การเขียนโปรแกรม

-
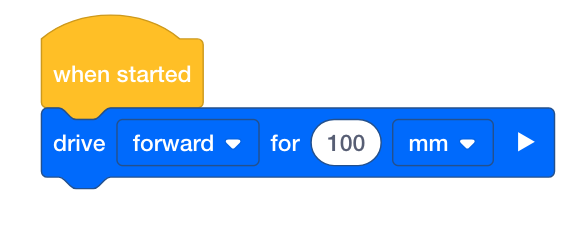
เลือกรายการแบบเลื่อนลงและเปลี่ยนหน่วยจากนิ้วเป็นมิลลิเมตร
-
เปลี่ยนระยะห่างจาก 1 มม. เป็น 100 มม.

-
คลิกที่ไอคอน ช่อง คุณสามารถดาวน์โหลดโปรเจ็กต์ของคุณลงในหนึ่งในสี่ช่องที่มีอยู่ใน Robot Brain คลิกที่หมายเลข 1.

-
เชื่อมต่อหุ่นยนต์เข้ากับคอมพิวเตอร์หรือแท็บเล็ตของคุณ ไอคอน Brain ในแถบเครื่องมือจะเปลี่ยนเป็นสีเขียวเมื่อทำการเชื่อมต่อสำเร็จ

-
คลิกปุ่ม ดาวน์โหลด บนแถบเครื่องมือเพื่อดาวน์โหลดโครงการ Drive ไปยัง Robot Brain
![]() กล่องเครื่องมือครู
-
ความช่วยเหลือเกี่ยวกับบล็อก
กล่องเครื่องมือครู
-
ความช่วยเหลือเกี่ยวกับบล็อก
-
ชี้ให้เห็นว่าในพื้นที่การเขียนโปรแกรมมี อยู่แล้วเมื่อเริ่มต้น บล็อกอยู่ที่นั่นโดยค่าเริ่มต้น ทุกโครงการจะเริ่มต้นด้วยบล็อกนี้ เมื่อโครงการเริ่มต้นขึ้น บล็อกที่เชื่อมต่อจะถูกปฏิบัติตามตามลำดับที่วางไว้
สาธิตการคลิกที่ไดรฟ์ สำหรับ บล็อก แล้วลากไปยังพื้นที่การเขียนโปรแกรม โดยเชื่อมต่อกับบล็อก {When started} คุณจะได้ยินเสียงคลิกเมื่อมันแนบ
-
หากคุณใช้คอมพิวเตอร์ นักเรียนควรมี VEX V5 Robot Brain เชื่อมต่อกับคอมพิวเตอร์โดยใช้สาย USB หากคุณใช้แท็บเล็ต VEX V5 Robot Brain ควรเชื่อมต่อกับแท็บเล็ตโดยใช้ Smart Radio
-
หากนักเรียนใช้คอมพิวเตอร์ ขอให้พวกเขาถอดสาย USB ออกจาก Robot Brain การมีหุ่นยนต์เชื่อมต่อกับคอมพิวเตอร์ในขณะที่ดำเนินโครงการอาจทำให้หุ่นยนต์ดึงสายเชื่อมต่อ
![]() กล่องเครื่องมือครู
-
หยุดและอภิปราย
กล่องเครื่องมือครู
-
หยุดและอภิปราย
ขอให้นักเรียนคาดการณ์สิ่งที่พวกเขาคิดว่าจะเกิดขึ้นเมื่อมีการดาวน์โหลดและเรียกใช้โปรเจ็กต์นี้บน Speedbot บอกให้นักเรียนบันทึกคำทำนายลงในสมุดบันทึกทางวิศวกรรม หากมีเวลา ขอให้แต่ละกลุ่มแบ่งปันคำทำนายของตน

-
ตรวจสอบให้แน่ใจว่าโปรเจ็กต์ของคุณมี ดาวน์โหลด ไปยัง Speedbot's Brain โดยดูที่หน้าจอ Robot Brain ชื่อโครงการควรระบุไว้ในช่องที่ 1
![]() กล่องเครื่องมือครู
-
รุ่นก่อน
กล่องเครื่องมือครู
-
รุ่นก่อน
แบบจำลองดำเนินโครงงานหน้าชั้นเรียนก่อนที่จะให้นักเรียนทุกคนลองทำพร้อมกัน รวบรวมนักเรียนไว้ในบริเวณเดียวและปล่อยให้มีที่เพียงพอให้สปีดบอทเคลื่อนที่ได้หากวางอยู่บนพื้น
บอกนักเรียนว่าตอนนี้ถึงคราวที่พวกเขาต้องทำโครงงานแล้ว ตรวจสอบให้แน่ใจว่าพวกเขามีเส้นทางที่ชัดเจน และไม่มีสปีดบอทมาชนกัน
- รัน โปรเจ็กต์บนหุ่นยนต์ Speedbot โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Run บน Robot Brain ขอแสดงความยินดีกับการสร้างโครงการแรกของคุณ!

![]() กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
-
หากต้องการเปลี่ยนบล็อก [Drive for] จาก ไปข้างหน้า ย้อนกลับเพียงคลิกที่เมนูแบบเลื่อนลงและเลือก ย้อนกลับ
-
จำนวน มม. สามารถเปลี่ยนแปลงได้ แต่สำหรับตัวอย่างนี้ เราจะปล่อยให้มันอยู่ที่ 100 มม. ตามที่ตั้งไว้ในขั้นตอนก่อนหน้า
-
หากนักเรียนใช้คอมพิวเตอร์ ขอให้เตือนให้ถอดสาย USB ออกจาก Robot Brain ก่อนดำเนินโครงการ
-
เนื่องจากเราไม่ได้เลือกสล็อตใหม่ โปรเจ็กต์ใหม่จะดาวน์โหลดไปที่สล็อต 1 และแทนที่โปรเจ็กต์ก่อนหน้า
-
เนื่องจาก VEXcode V5 มีการบันทึกอัตโนมัติ จึงไม่จำเป็นต้องบันทึกโปรเจ็กต์อีกครั้ง
ขั้นตอนที่ 5: รอแล้วขับถอยหลัง

![]() กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 5
กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 5
-
คุณสามารถวางบล็อก [รอ] ไว้ที่ใดก็ได้ในโครงการ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับบล็อก [รอ] ให้เปิด วิธีใช้
-
การใช้บล็อก [รอ] จะไม่สิ้นสุดโปรเจ็กต์
-
หากนักเรียนใช้คอมพิวเตอร์ ขอให้เตือนให้ถอดสาย USB ออกจาก Robot Brain ก่อนดำเนินโครงการ
-
เนื่องจากเราไม่ได้เลือกสล็อตใหม่ โปรเจ็กต์ใหม่จะดาวน์โหลดไปที่สล็อต 1 และแทนที่โปรเจ็กต์ก่อนหน้า
-
เนื่องจาก VEXcode V5 มีการบันทึกอัตโนมัติ จึงไม่จำเป็นต้องบันทึกโปรเจ็กต์อีกครั้ง
ขั้นตอนที่ 6: พิชิตการฝึกซ้อมบาสเก็ตบอล!
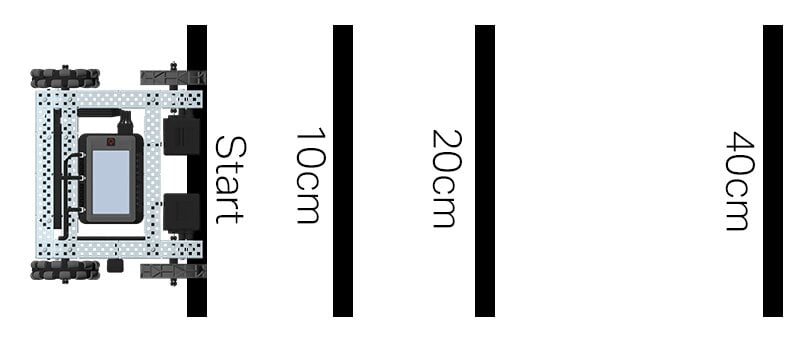
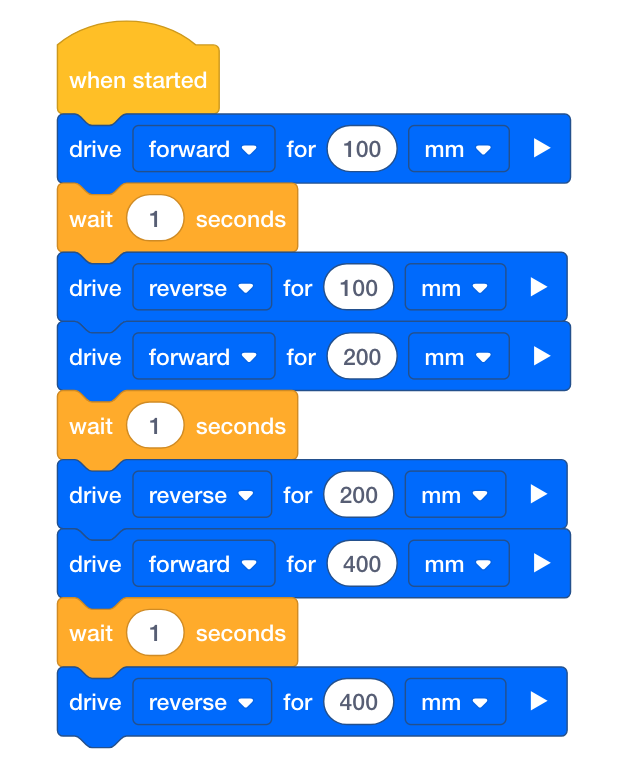
ในการแข่งขัน Basketball Drills Challenge หุ่นยนต์จะต้องสามารถนำทางชุดของเส้นในระยะทางที่ต่างกันได้ หุ่นยนต์จะเคลื่อนที่ไปข้างหน้าไปยังเส้นแรกซึ่งอยู่ห่างจากตำแหน่งเริ่มต้น 10 ซม. รอ 1 วินาที จากนั้นเดินทางย้อนกลับกลับไปยังเส้นเดิม หุ่นยนต์จะทำซ้ำการกระทำโดยขับไปข้างหน้า 20 ซม. ไปยังเส้นที่สอง รอ 1 วินาที จากนั้นขับถอยหลังไปยังเส้นสตาร์ทเดิม หุ่นยนต์จะขับไปข้างหน้าถึงเส้นที่สามด้วยระยะ 40 ซม. รอ 1 วินาที แล้วจึงกลับสู่เส้นเริ่มต้นในที่สุดเพื่อสิ้นสุดการท้าทาย
ก่อนที่จะตั้งโปรแกรมหุ่นยนต์ ให้วางแผนเส้นทางและพฤติกรรมของหุ่นยนต์ในสมุดบันทึกทางวิศวกรรมของคุณ
หลังจากเสร็จสิ้นการแข่งขันบาสเก็ตบอล คุณจะสามารถรวมการเคลื่อนไหวไปข้างหน้าและย้อนกลับเข้ากับพฤติกรรมของหุ่นยนต์เพิ่มเติมเพื่อบรรลุความท้าทายขั้นสูงยิ่งขึ้น
โปรดจำไว้ว่าเมื่อตั้งโปรแกรมที่ 1 ซม. = 10 มม
![]() กล่องเครื่องมือครู
-
หยุดและอภิปราย
กล่องเครื่องมือครู
-
หยุดและอภิปราย
ขอให้นักเรียนแบ่งปันวิธีแก้ปัญหาเป็นคู่ก่อนที่จะอภิปรายกันทั้งชั้น อำนวยความสะดวกในการอภิปรายโดยถามว่า:
-
คุณประสบปัญหาใด ๆ ในขณะที่ตั้งโปรแกรมการท้าทายนี้หรือไม่?
-
หุ่นยนต์ของคุณมีพฤติกรรมเหมือนที่คุณคาดหวังตามโครงการของคุณหรือไม่? ทำไมหรือทำไมไม่?
-
หากคุณสามารถเอาชนะความท้าทายได้ มีอะไรที่คุณจะทำแตกต่างออกไปหรือไม่?
![]() เคล็ดลับของครู
เคล็ดลับของครู
ตรวจสอบว่าหุ่นยนต์ประสบความสำเร็จในการท้าทายโดยใช้แท่งมิเตอร์หรือไม้บรรทัดและเทปเพื่อทำเครื่องหมายตำแหน่งเริ่มต้นสำหรับหุ่นยนต์ จากนั้นทำเครื่องหมาย 10 มม., 20 มม. และ 40 มม. จากตำแหน่งเริ่มต้นนั้นเพื่ออ้างอิงถึงตำแหน่งที่หุ่นยนต์ต้องเคลื่อนที่เพื่อให้ความท้าทายเสร็จสมบูรณ์
![]() กล่องเครื่องมือครู
-
วิธีแก้ปัญหา
กล่องเครื่องมือครู
-
วิธีแก้ปัญหา
คุณสามารถดูรูบริกการเขียนโปรแกรมเพื่อประเมินนักเรียนได้ที่นี่ (Google / .docx / .pdf) คุณสามารถดูรูบริกสำหรับการประเมินสมุดบันทึกด้านวิศวกรรมของทีมได้ที่นี่ (Google / .docx / .pdf) และสามารถดูรูบริกสำหรับการประเมินสมุดบันทึกแต่ละรายการได้ที่นี่ (Google / .docx / )). เมื่อใดก็ตามที่คุณวางแผนประเมินงานของนักเรียนโดยใช้เกณฑ์การให้คะแนน อย่าลืมแบ่งปันเกณฑ์การให้คะแนนกับนักเรียนก่อนที่นักเรียนจะเริ่มโครงงาน