
परिचय
इस पाठ में आप डिस्टेंस सेंसर के बारे में जानेंगे, तथा यह भी जानेंगे कि डिस्टेंस सेंसर से प्राप्त डेटा का उपयोग किसी प्रोजेक्ट में वस्तुओं का पता लगाने के लिए कैसे किया जा सकता है। आप [Wait until] ब्लॉक के बारे में भी जानेंगे, तथा यह भी जानेंगे कि इसका उपयोग VEXcode EXP प्रोजेक्ट में आपके रोबोट को निर्णय लेने के लिए कैसे किया जा सकता है। इसके बाद, आप सेंस और स्वीप चैलेंज में अपने बेसबॉट के साथ बकीबॉल का पता लगाने और उन्हें स्थानांतरित करने के लिए अपने सीखे हुए ज्ञान का प्रयोग करेंगे। नीचे दिए गए एनीमेशन को देखें कि बेसबॉट किस प्रकार घूम सकता है, फील्ड से प्रत्येक क्यूब का पता लगा सकता है और उसे साफ़ कर सकता है।
दूरी सेंसर जोड़ें
इस पाठ में, आप दूरी सेंसर के बारे में जानेंगे, और यह भी जानेंगे कि आप सेंसर फीडबैक का उपयोग करके अपने रोबोट को कैसे कोड कर सकते हैं।
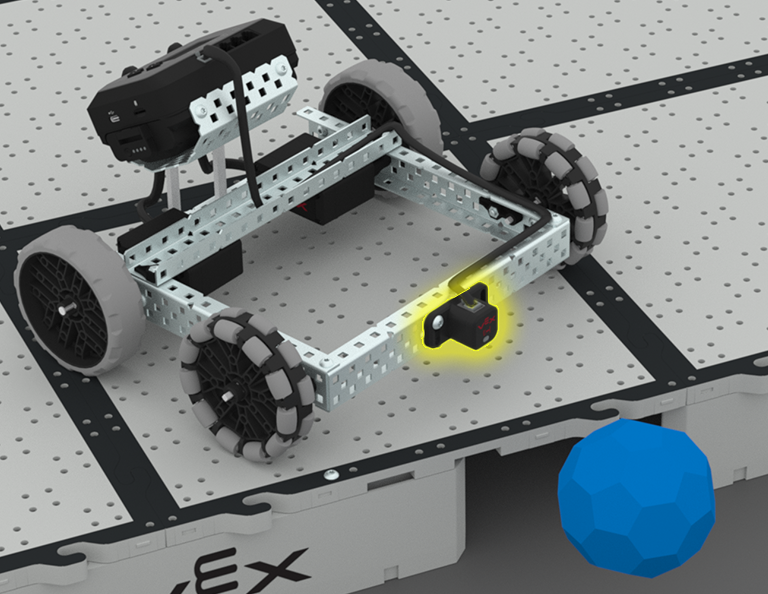
इस छवि में दिखाए अनुसार अपने बेसबॉट में एक दूरी सेंसर जोड़ें।
- बेसबॉट के सामने 1x2x1x16 सी-चैनल जोड़ें।
- फिर, चित्र में दिखाए अनुसार डिस्टेंस सेंसर को सी-चैनल पर माउंट करें।
- दूरी सेंसर को पोर्ट 5 में प्लग किया जाना चाहिए।
पाठ अवलोकन पर लौटने के लिए< पाठ पर लौटेंका चयन करें।
दूरी सेंसर और [प्रतीक्षा करें] ब्लॉक के बारे में जानने के लिएअगला > चयन करें।