
पूरा
अब जब आपने ड्राइवर नियंत्रण के साथ अपने रोबोट को चलाना सीख लिया है, और विभिन्न ड्राइवर नियंत्रण कॉन्फ़िगरेशन का परीक्षण कर लिया है, तो आप स्पीड और स्कोर चैलेंज के लिए तैयार हैं।
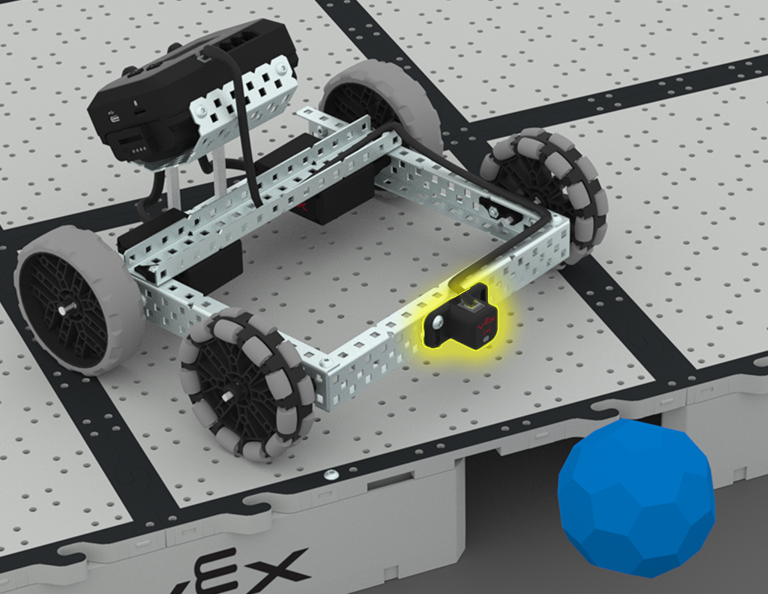
इस चुनौती का लक्ष्य अपने रोबोट को मैदान पर छोटे पोस्ट पर दोनों रिंगों को पकड़ने और सबसे तेज समय में स्कोर करने के लिए प्रेरित करना है। नीचे दिया गया एनीमेशन दर्शाता है कि फील्ड को किस प्रकार स्थापित किया जाना चाहिए, तथा दोनों रिंगों को चलाने और स्कोर करने का एक संभावित तरीका भी दर्शाया गया है। जो रोबोट सबसे तेजी से दोनों रिंग प्राप्त कर लेता है, वह जीत जाता है।
स्पीड और स्कोर चुनौती को पूरा करने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google / .docx / .pdf
एक बार जब आप स्पीड और स्कोर चुनौती पूरी कर लें, तो अपने शिक्षक से संपर्क करें। सुनिश्चित करें कि आपने चुनौती के परिणामों को अपनी इंजीनियरिंग नोटबुक में दर्ज कर लिया है।
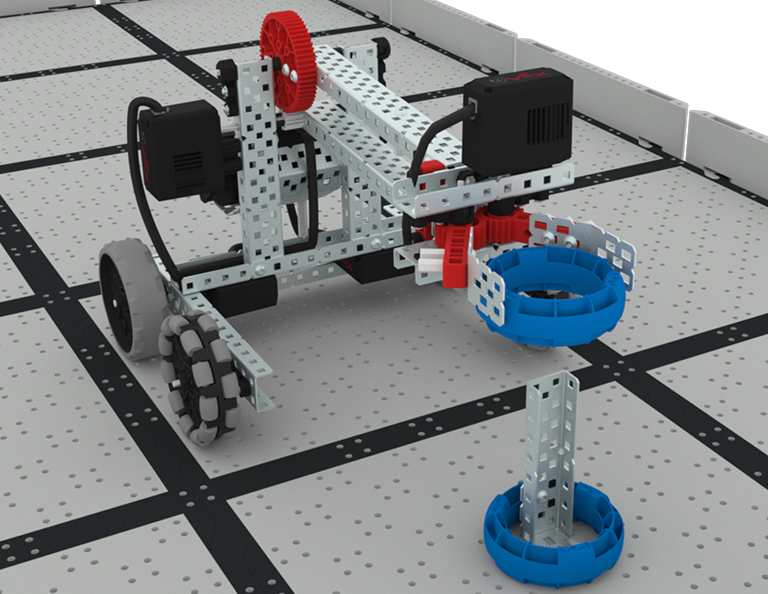
नीचे दिए गए वीडियो में क्लॉबोट मैदान के बाईं ओर है। मैदान पर दो छल्ले हैं: एक मैदान के शीर्ष के पास, दूसरे और तीसरे टाइलों के बीच स्थित है, और दूसरा मैदान के निचले भाग के पास, दूसरे और तीसरे टाइलों के बीच स्थित है। मैदान के बीच में, दाहिनी ओर एक एकल पोस्ट है। वीडियो उल्टी गिनती से शुरू होता है: 3, 2, 1. क्लॉबोट दूसरे और तीसरे टाइल तक जाता है और फिर पहले रिंग की ओर बढ़ता है, तथा उसे उठाता है। फिर वह अपना पंजा उठाता है और पीछे हट जाता है। इसके बाद, यह खंभे की ओर बढ़ता है और पंजा छोड़ देता है, जिससे अंगूठी खंभे पर गिर जाती है। इसके बाद, क्लॉबोट पीछे हटता है और पंजे को नीचे कर देता है। इसके बाद यह मैदान के निचले हिस्से में स्थित दूसरे रिंग तक जाता है, उसे उठाता है, घुमाता है, और पोस्ट तक ले जाता है। क्लॉबोट पंजा छोड़ देता है, जिससे अंगूठी खंभे पर गिर जाती है। चुनौती पूरी होने पर टाइमर इस बिंदु पर रुक जाता है, तथा 21.22 सेकंड दिखाता है।
समापन परावर्तन
अब जबकि आपने रणनीति बना ली है और स्पीड और स्कोर चैलेंज में प्रतिस्पर्धा कर ली है, तो यह समय है कि आप इस पाठ में क्या सीखा और क्या किया, इस पर विचार करें। अपने चिंतन को शुरू करने के लिए अपनी इंजीनियरिंग नोटबुक में एक नया पृष्ठ शुरू करें।
अपनी इंजीनियरिंग नोटबुक में निम्नलिखित प्रत्येक अवधारणा पर स्वयं को नौसिखिया, प्रशिक्षु या विशेषज्ञ के रूप में मूल्यांकन करें। प्रत्येक अवधारणा के लिए आपने स्वयं को वह रेटिंग क्यों दी, इसका संक्षिप्त विवरण दीजिए:
- अपनी ड्राइविंग आवश्यकताओं और कौशलों को सर्वोत्तम रूप से पूरा करने के लिए ड्राइवर नियंत्रण कार्यक्रम को कैसे अनुकूलित करें
- एक ड्राइवर नियंत्रण कॉन्फ़िगरेशन चुनना जो मुझे रिंग स्कोर करने के लिए पंजे और भुजा का कुशलतापूर्वक उपयोग करने की अनुमति देता है
- अपनी टीम के साथ मिलकर रिंगों को अधिक तेजी से स्कोर करने के लिए ड्राइविंग रणनीति विकसित करना
यह निर्धारित करने में सहायता के लिए कि आप किस श्रेणी में आते हैं, इस तालिका का उपयोग करें।
| विशेषज्ञ | मुझे लगता है कि मैंने इस अवधारणा को पूरी तरह से समझ लिया है और मैं इसे किसी और को भी सिखा सकता हूँ। |
| शिक्षु | मुझे लगता है कि मैंने चुनौती में भाग लेने के लिए अवधारणा को पर्याप्त रूप से समझ लिया है। |
| नौसिखिए | मुझे लगता है कि मैं अवधारणा को समझ नहीं पाया और मुझे नहीं पता कि चुनौती को कैसे पूरा किया जाए। |
अगला क्या है?
इस पाठ में, आपने अपने रोबोट को अधिक प्रभावी ढंग से रिंग उठाने और स्कोर करने के लिए ड्राइवर नियंत्रण का उपयोग करने के बारे में सीखा। फिर आपने स्पीड और स्कोर चैलेंज में प्रतिस्पर्धा की। अगले पाठ में आप:
- स्वायत्त गतिविधियों की कोडिंग के बारे में जानें
- एक पथ की योजना बनाएं और अपने रोबोट को स्वायत्त रूप से चलने के लिए कोड करें
- कोडिंग क्रंच चैलेंज में प्रतिस्पर्धा करें!
पाठ अवलोकन पर वापस जाने के लिए < पाठ पर लौटें का चयन करें।
पाठ 3 पर जारी रखने और स्वायत्त आंदोलनों को कोड करने के बारे में जानने के लिए अगला पाठ > का चयन करें।