
खेल
भाग 1 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे एक प्रोजेक्ट बनाने जा रहे हैं जिसमें रोबोट आर्म एक डिस्क को उसके रंग के आधार पर स्थानांतरित करेगा।
रोबोट आर्म तब तक प्रतीक्षा करेगा जब तक कि डिस्क का पता न चल जाए, डिस्क का रंग जांचेगा, तथा उस रंग के आधार पर निर्णय लेगा। यदि डिस्क प्रोजेक्ट में दिए गए रंग से मेल खाती है, तो रोबोट आर्म डिस्क को उठाएगा, और उसे टाइल के दूसरे भाग में ले जाएगा, डिस्क को नीचे गिराएगा, और प्रारंभिक स्थान पर वापस आ जाएगा। नीचे दिए गए वीडियो को देखें कि कैसे रोबोट आर्म पहले डिस्क को पहचान कर, तथा फिर उसके रंग के आधार पर उसे उठाकर दूसरे स्थान पर ले जाकर, डिस्क को सफलतापूर्वक स्थानांतरित कर सकता है।
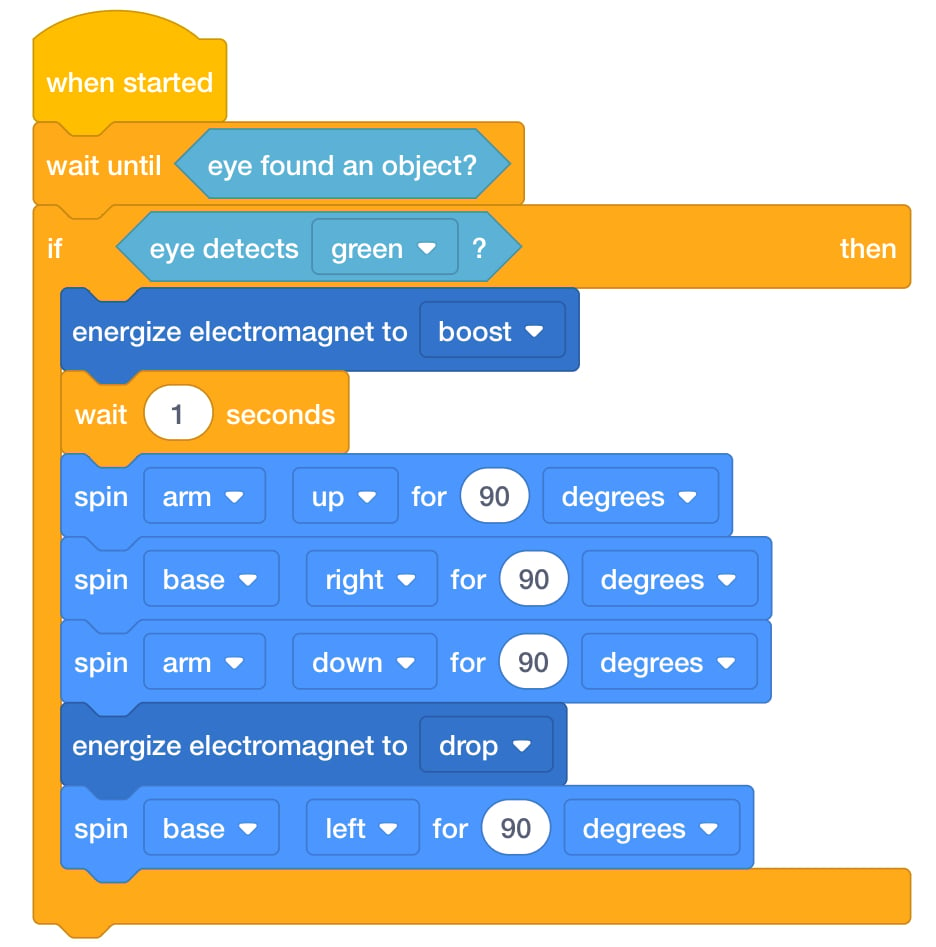
वीडियो फाइल - मॉडलछात्रों के साथ प्रोजेक्ट में [यदि तो] ब्लॉक और [हमेशा के लिए] ब्लॉक को जोड़ने का मॉडल बनाएं। बता दें कि इस उदाहरण में रोबोट आर्म हरे रंग की तलाश करेगा
-
छात्रों को अपना लैब 4 भाग 2 प्रोजेक्ट खोलने और उसका नाम बदलने को कहें लैब 5 भाग 1।

परियोजना का नाम बताइए - यदि कोई छात्र लैब 4 में उपस्थित नहीं था या उसे अपना प्रोजेक्ट नहीं मिल रहा है, तो उसे लैब 5 इमेज स्लाइड शो से लैब 4 भाग 2 समाधान पुनः बनाने को कहें।

लैब 4 भाग 2 समाधान - शुरू करने से पहले, सुनिश्चित करें कि छात्रों ने अपने डिवाइस को अपने कोड रोबोट आर्म (2-एक्सिस) से कनेक्ट कर लिया है और उनके प्रोजेक्ट का कॉन्फ़िगरेशन रोबोट आर्म पर सेट है। यदि आवश्यक हो, तो रोबोट आर्म को कॉन्फ़िगर करें और VEX GO ब्रेन को कनेक्ट करेंके चरणों की समीक्षा करें, फिर छात्रों को अपने रोबोट आर्म को कनेक्ट और कॉन्फ़िगर करने के लिए इन चरणों का मॉडल बनाएं।
नोट: जब आप पहली बार अपने रोबोट आर्म को अपने डिवाइस से कनेक्ट करते हैं, तो ब्रेन में निर्मित जायरो कैलिब्रेट हो सकता है, जिससे रोबोट आर्म एक पल के लिए अपने आप चलने लगता है। यह एक अपेक्षित व्यवहार है, कैलिब्रेट करते समय रोबोट आर्म को न छुएं।
- [यदि तो] ब्लॉक को कार्यक्षेत्र में खींचें.
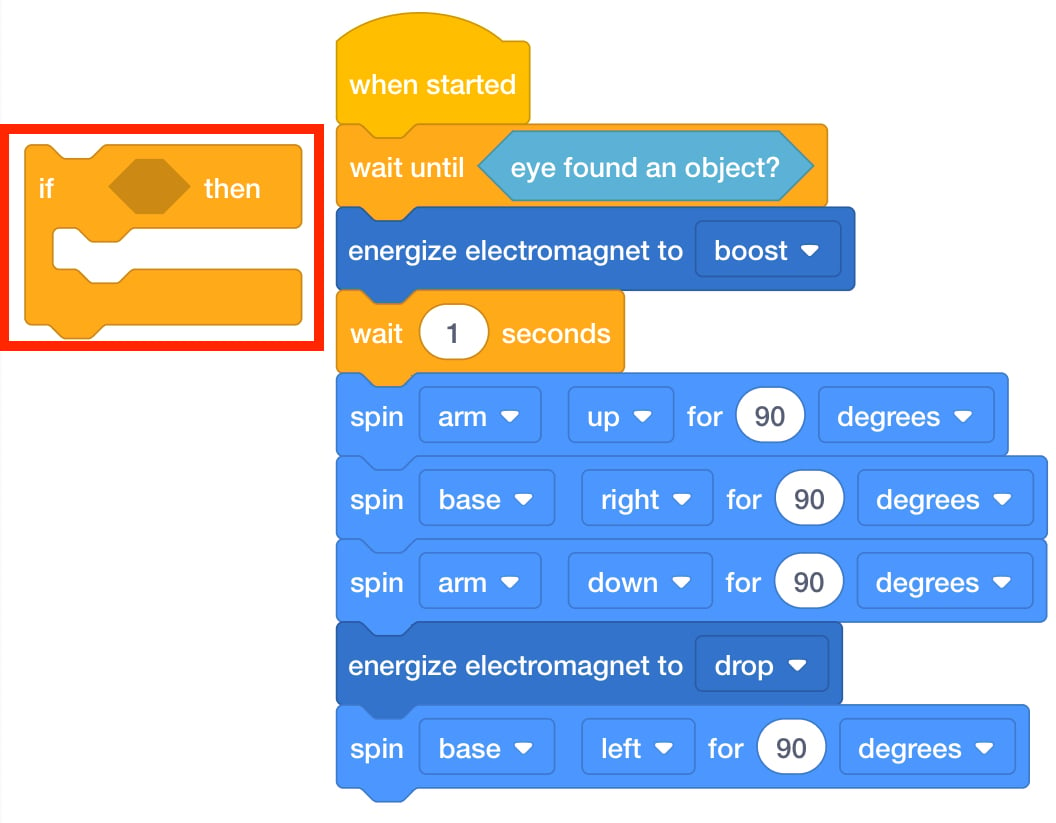
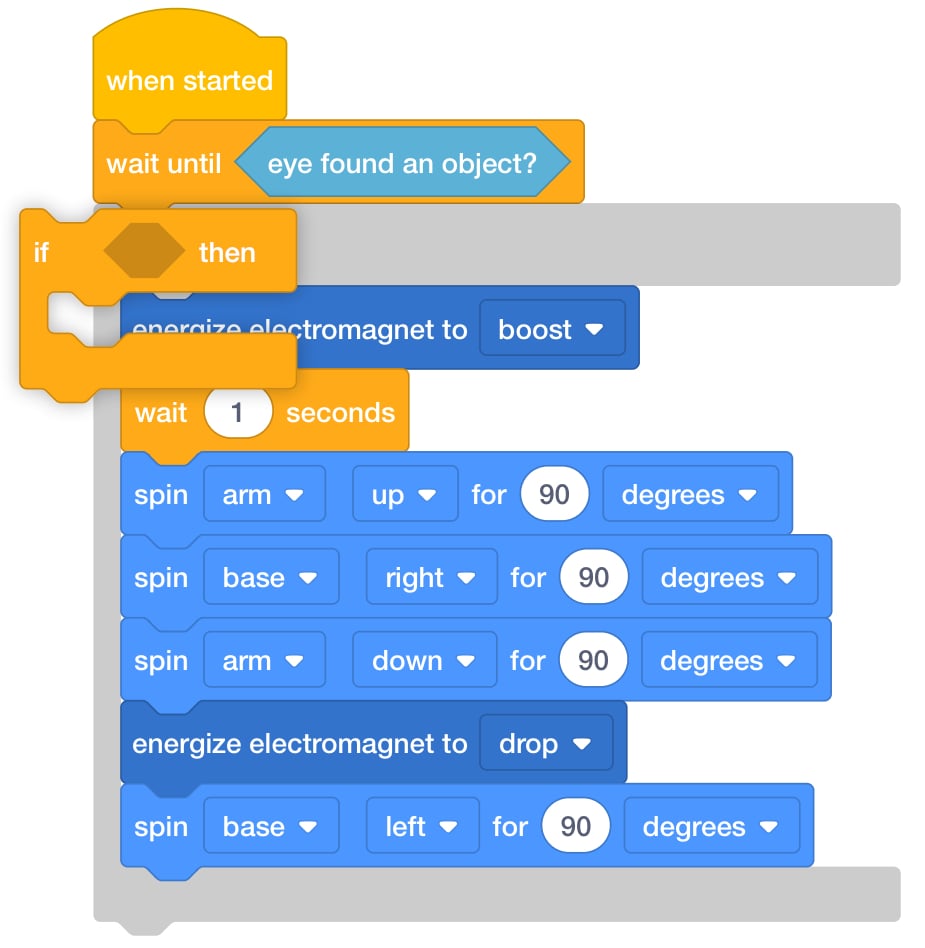
कार्यक्षेत्र में [यदि तो] ब्लॉक जोड़ें - मौजूदा ब्लॉकों के चारों ओर एक [यदि तो] ब्लॉक जोड़ा जा सकता है। विद्यार्थियों को ब्लॉक जोड़ते समय दिखाई देने वाली छाया दिखाएं। यह छाया इंगित करती है कि ब्लॉक को स्टैक में कहां जोड़ा जाएगा।
किसी प्रोजेक्ट में [यदि तो] जोड़ना - विद्यार्थियों से पूछें कि वे किस स्थिति की जांच करना चाहते हैं (नेत्र संवेदक एक विशिष्ट रंग की वस्तु का पता लगाता है)। <Color sensing> ब्लॉक को [यदि तो] ब्लॉक में खींचें.
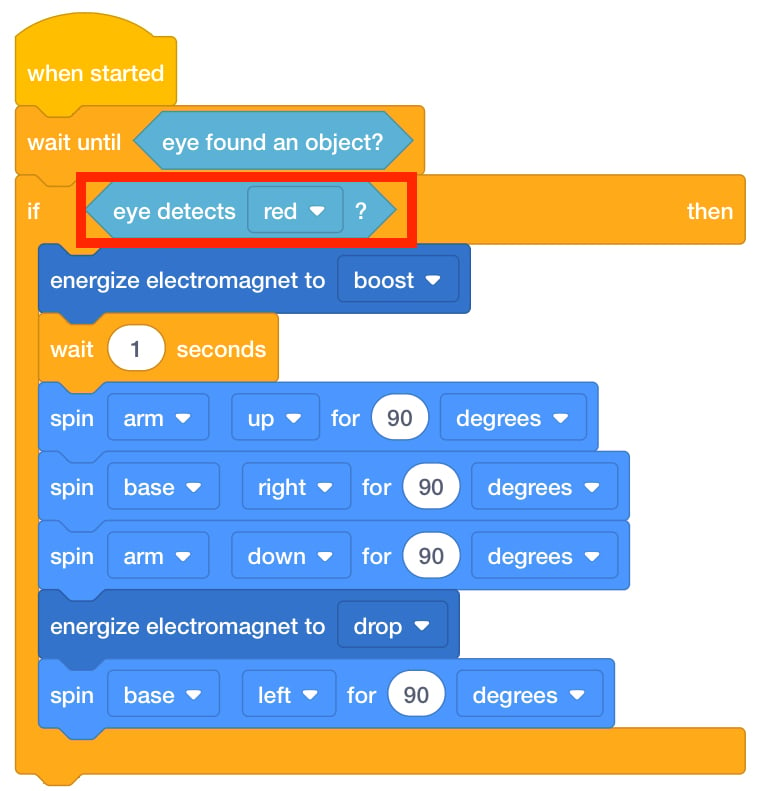
<Color sensing> ब्लॉक जोड़ा गया - समझाएं कि <Color sensing> ब्लॉक का उपयोग डिस्क के रंगों का पता लगाने के लिए किया जा सकता है: लाल, नीला और हरा। 'हरा' ड्रॉप-डाउन विकल्प चुनें।
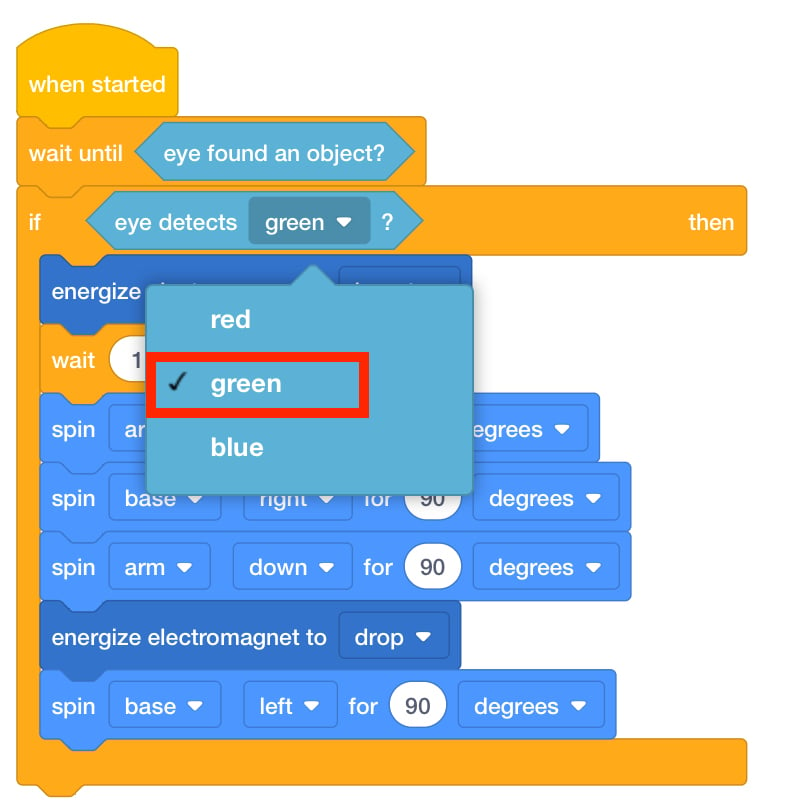
'हरा' चुनें - समझाएं कि [यदि तो] ब्लॉक सशर्त कथन हैं जो रोबोट को एक स्थिति की जांच करने का निर्देश देते हैं, और यदि स्थिति सत्य है, तो यह ब्लॉक चलेगा।
[यदि तो] ब्लॉक के साथ प्रोजेक्ट- विद्यार्थियों से पूछें कि इस परियोजना प्रवाह में रोबोट आर्म कितनी बार <Color sensing> स्थिति की जांच करेगा। क्या वे चाहते हैं कि इसकी जांच कितनी बार की जाए? इसे बार-बार जांचने के लिए, उन्हें [हमेशा] ब्लॉक जोड़ना होगा। एक [Forever] ब्लॉक को कार्यक्षेत्र में खींचें और उसे ब्लॉकों के मौजूदा ढेर के चारों ओर रखें।
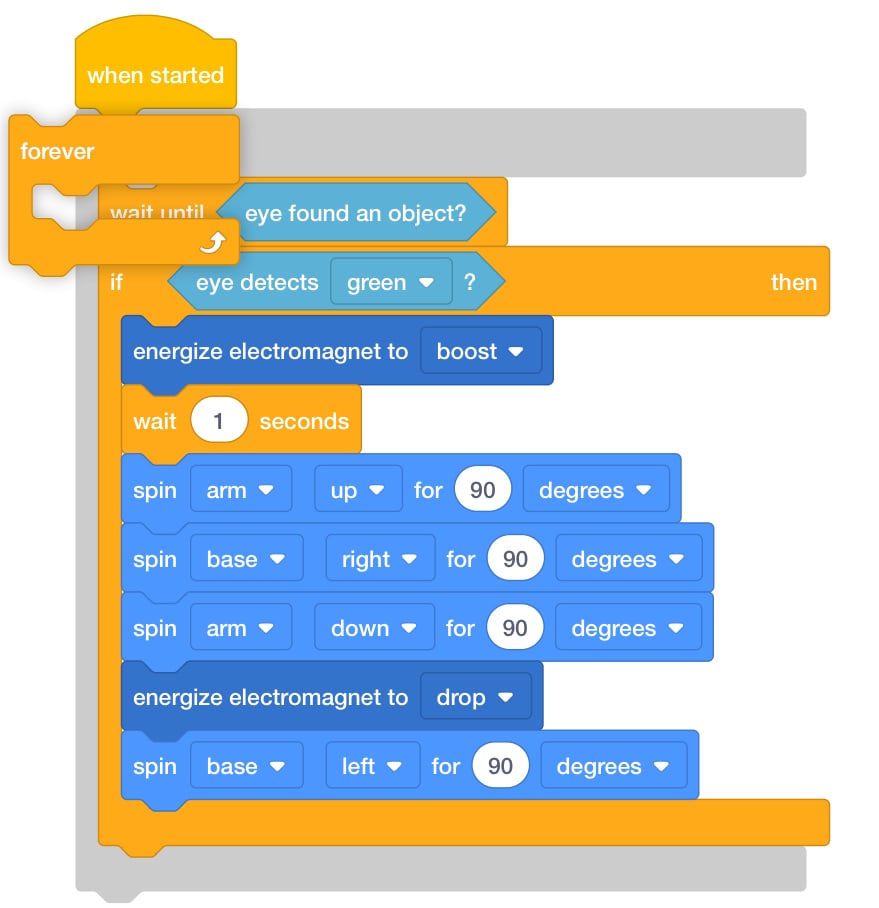
[हमेशा के लिए] ब्लॉक जोड़ें- छात्रों को अपने प्रोजेक्ट में <Color sensing> ब्लॉक में उपलब्ध तीन रंगों में से किसी एक का चयन करने का निर्देश दें। उन्हें रोबोट आर्म पर इलेक्ट्रोमैग्नेट के साथ समान रंग की डिस्क को जोड़ना चाहिए और यह देखने के लिए अपना प्रोजेक्ट शुरू करना चाहिए कि रोबोट आर्म डिस्क को कैसे घुमाता है।
- नोट: लैब 5 भाग 1 समाधान चुने गए रंग समूहों के आधार पर थोड़ा भिन्न होगा।

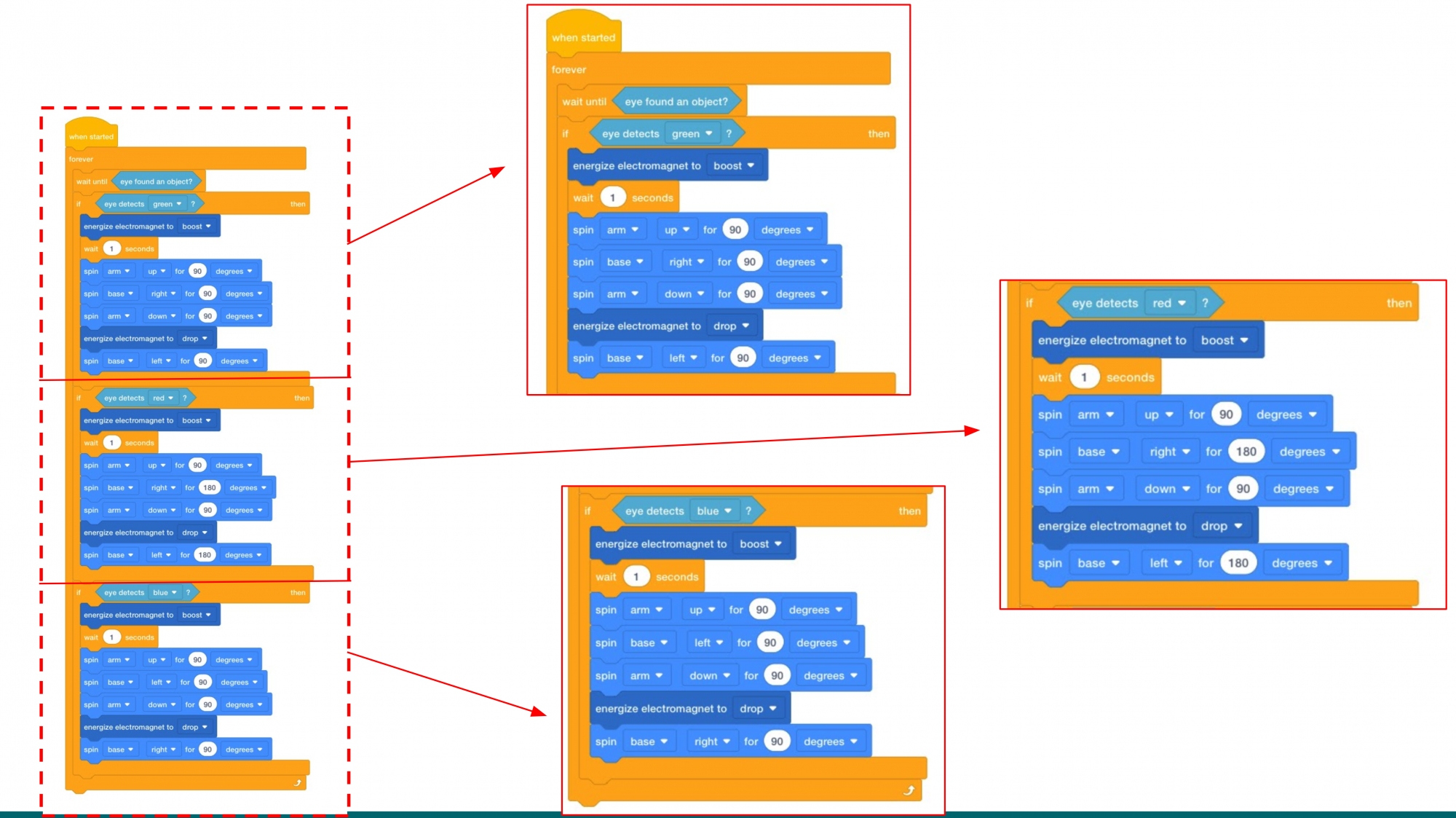
लैब 5 भाग 1 समाधान -
- सुविधा प्रदान करनाजब छात्र अपनी परियोजनाएं बनाना शुरू करते हैं तो बातचीत को सुविधाजनक बनाएं। उन्हें अपनी परियोजनाएं बनाते समय उनका परीक्षण करने के लिए प्रोत्साहित करें।
- क्या आपकी परियोजना अपेक्षित रूप से काम करती है? क्यों या क्यों नहीं?
- आप इस परियोजना में [फॉरएवर] ब्लॉक क्या करता है, इसका वर्णन कैसे करेंगे?
- आपको क्या लगता है अगर हम रोबोट आर्म के सामने एक अलग रंग की डिस्क रख दें तो क्या होगा? क्या रोबोट आर्म डिस्क को हिलाएगा? आप ऐसा क्यों सोचते हैं?
- यदि आप चाहते हैं कि रोबोट आर्म में दो रंग हों, तो आपको और कौन से ब्लॉक जोड़ने होंगे?
- याद दिलाएंसमूहों को याद दिलाएं कि यदि वे भ्रमित हों तो प्रश्न पूछें। यदि उन्हें नये ब्लॉकों का उपयोग करने में कोई समस्या हो तो उन्हें पुनः इन चरणों का पालन करने को कहें।
जिन समूहों ने अपनी परियोजना पूरी कर ली है, उनसे उन समूहों की मदद करने को कहें जिन्हें अधिक सहायता की आवश्यकता हो सकती है।
- पूछेंछात्रों से कक्षा या घर की घटनाओं का वर्णन “यदि...तो…” वाक्यों के रूप में करने के लिए कहें। उदाहरण के लिए:
- यदि मुझे उत्तर पता है, तो मैं अपना हाथ उठाता हूँ।
- यदि घंटी बजती है, तो यह दोपहर के भोजन का समय है।
- यदि मैं अपना सारा होमवर्क पूरा कर लेता हूं, तो मुझे एक घंटे का स्क्रीनटाइम मिलता है।
खेल के बीच में ब्रेक & समूह चर्चा
जैसे ही प्रत्येक समूह अपने रोबोट आर्म कोरंगीन डिस्क उठाने के लिए कोड किया, वे बातचीत के लिए एक साथ आए।
- आपके रोबोट आर्म ने क्या किया?
- छात्रों को रोबोट के व्यवहार के बारे में यथासंभव विशिष्ट रूप से बोलने के लिए प्रोत्साहित करें। “इसने एक लाल डिस्क देखी” के स्थान पर कहें “रोबोट आर्म के नेत्र सेंसर ने एक लाल डिस्क का पता लगाया।”
- रोबोट आर्म ने हमारी परियोजनाओं में निर्णय कैसे लिये? रोबोट आर्म को निर्णय लेने के निर्देश देने के लिए हमने किन ब्लॉकों का उपयोग किया?
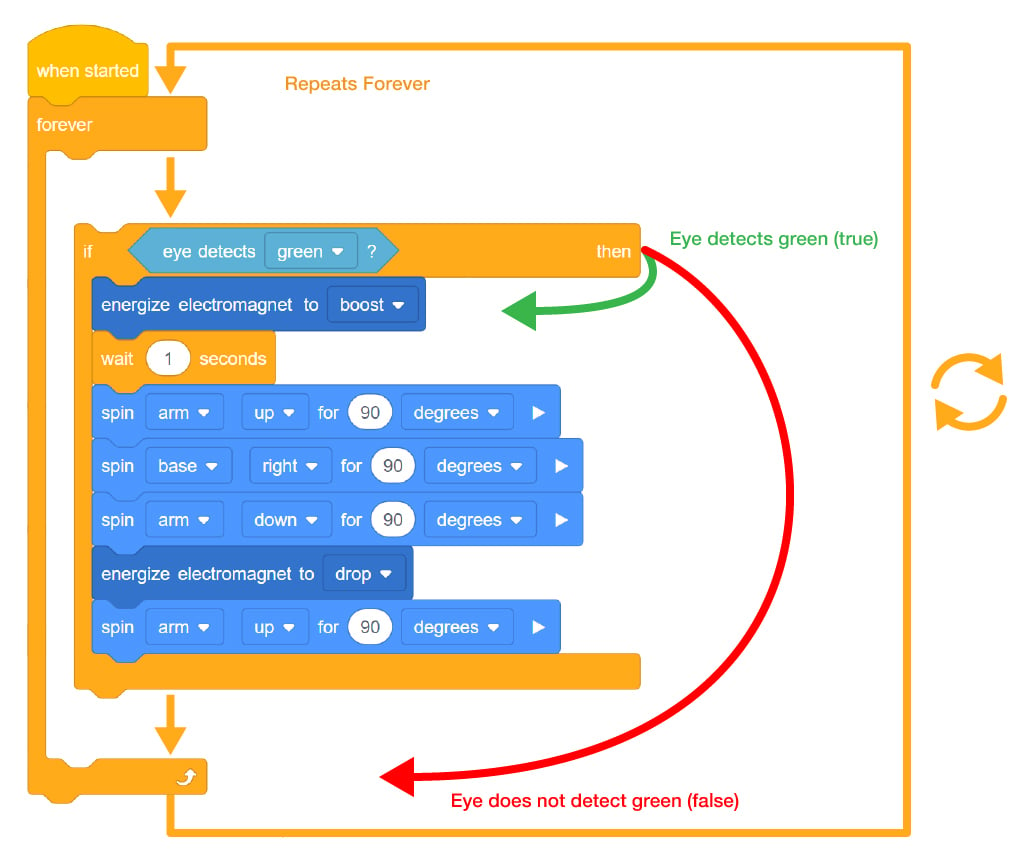
- रोबोट आर्म कितनी बार किसी रंग की जांच करेगा? क्यों? यदि हम [हमेशा के लिए] ब्लॉक हटा दें तो क्या होगा?
- इस वार्तालाप को सुविधाजनक बनाने के लिए परियोजना प्रवाह छवि का उपयोग करें।
भाग 2 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे अपने प्रोजेक्ट में क्या जोड़ने जा रहे हैं, रोबोट भुजा रंगीन डिस्क को उनके रंग के आधार पर अलग-अलग स्थानों पर ले जाएगी। नीचे दिए गए वीडियो को देखें कि कैसे रोबोट आर्म पहले डिस्क को पहचानकर तथा फिर रंग के आधार पर उसे उठाकर दूसरे स्थान पर ले जाकर तीनों डिस्क को सफलतापूर्वक स्थानांतरित कर सकता है। एनीमेशन में, पहले एक हरे रंग की डिस्क को स्थानांतरित किया जाता है, फिर एक लाल डिस्क को, और अंत में, एक नीली डिस्क को सफलतापूर्वक वितरित किया जाता है।
वीडियो फाइल
- मॉडलछात्रों के लिए मॉडल बनाएं, जिसमें रोबोट आर्म को रंग के आधार पर डिस्क को अलग-अलग स्थानों पर ले जाने के निर्देश देने के लिए उनके प्रोजेक्ट में जोड़ने के चरण बताए जाएं।

डिस्क स्थान - प्रत्येक समूह को अपने डिवाइस पर VEXcode GO लॉन्च करने और अपना लैब 5 भाग 1 प्रोजेक्ट खोलने के लिए कहें। नई परियोजना इसी परियोजना पर आधारित होगी।
-
छात्रों को लैब की शुरुआत में अपने प्रोजेक्ट को नए नाम से सेव करना होगा। उन्हें फ़ाइल मेनू से "इस रूप में सहेजें" या "अपने डिवाइस में सहेजें" (आप किस VEXcode GO संस्करण का उपयोग कर रहे हैं, इस पर निर्भर करता है) का चयन करने दें और अपने प्रोजेक्ट को लैब 5 भाग 2के रूप में सहेजें। यदि एक से अधिक समूह एक ही डिवाइस पर काम कर रहे हैं, तो उन्हें प्रोजेक्ट में अपना समूह नाम जोड़ने को कहें।

परियोजना का नाम बताइए - शुरू करने से पहले, सुनिश्चित करें कि छात्रों ने अपने डिवाइस को अपने कोड रोबोट आर्म (2-एक्सिस) से कनेक्ट कर लिया है और रोबोट आर्म कॉन्फ़िगर किया गया है। यदि आवश्यक हो, तो रोबोट आर्म को कॉन्फ़िगर करें और VEX GO ब्रेन को कनेक्ट करेंके चरणों की समीक्षा करें, फिर छात्रों को अपने रोबोट आर्म को कनेक्ट और कॉन्फ़िगर करने के लिए इन चरणों का मॉडल बनाएं।
- फिलहाल, रोबोट आर्म में निर्देश हैं कि जब ग्रीन डिस्क का पता चले तो क्या करना है। ब्लॉकों की प्रतिलिपि बनाकर, अन्य रंगों के लिए निर्देश शीघ्रता से बनाए जा सकते हैं।
- [यदि तो] ब्लॉक पर राइट-क्लिक करके या लंबे समय तक दबाकर ब्लॉकों की प्रतिलिपि बनाने का मॉडल बनाएं।

संदर्भ मेनू - [यदि तो] ब्लॉक को दो बार डुप्लिकेट करें और उन्हें पहले [यदि तो] ब्लॉक के नीचे जोड़ें।
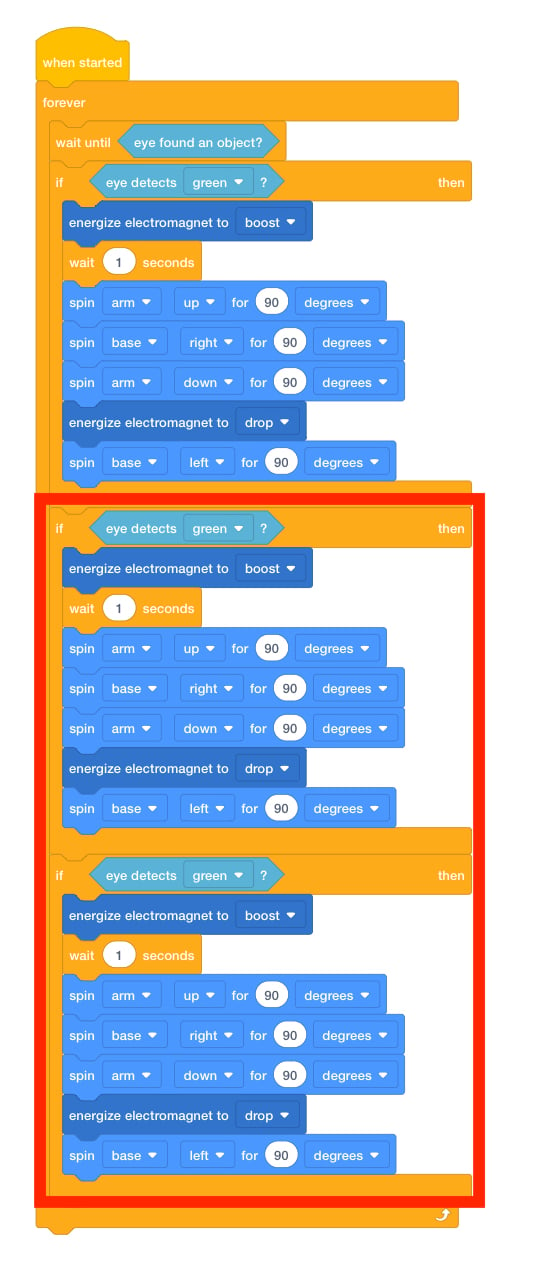
डुप्लिकेट ब्लॉक - छात्रों को समझाएं कि उन्हें नए जोड़े गए [यदि तो] ब्लॉक के अंदर <Color sensing> ब्लॉक को अतिरिक्त डिस्क रंगों में बदलना होगा। दूसरे <Color sensing> ब्लॉक को 'लाल' में बदलें।
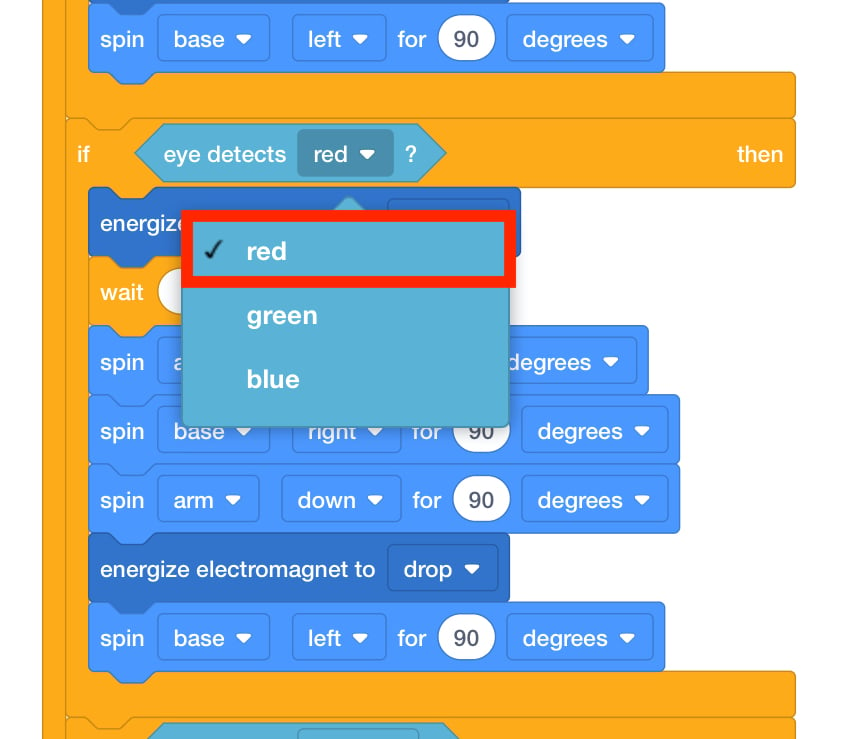
'लाल' में बदलें - इस [यदि तो] ब्लॉक के अंदर के ब्लॉक को बदलने की आवश्यकता है ताकि रोबोट आर्म को बताया जा सके कि लाल डिस्क को कहां रखना है। बेस मोटर को नियंत्रित करने वाले [स्पिन फॉर] ब्लॉक के मापदंडों को प्रत्येक दिशा में 180 डिग्री तक घुमाएं।
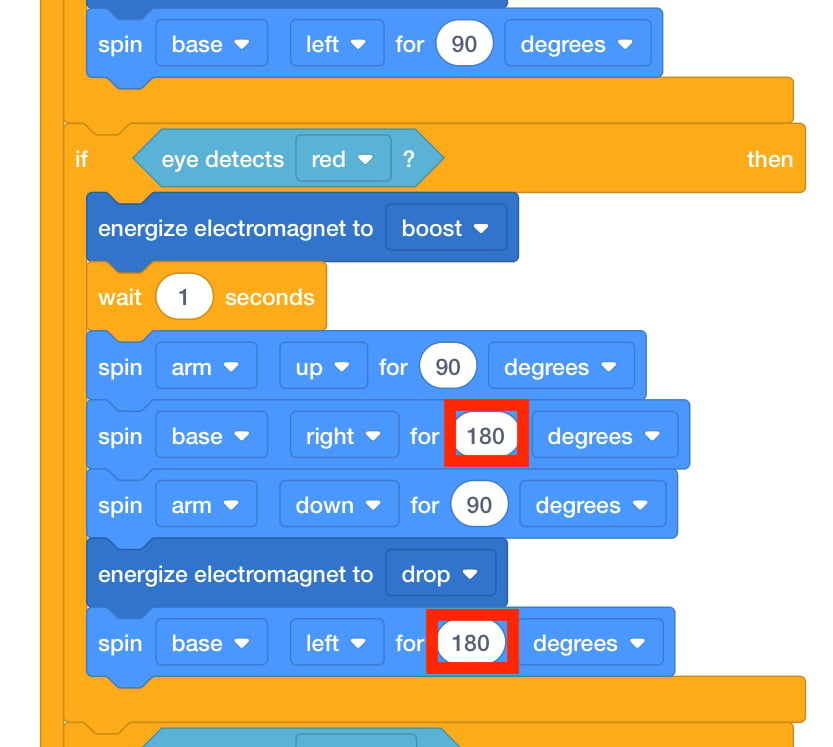
ड्रॉप ऑफ स्थान बदलें - अब चूंकि रोबोट आर्म को पता है कि लाल डिस्क या हरी डिस्क को कहां ले जाना है, इसलिए छात्रों को अंतिम स्टैक को संपादित करने का निर्देश दें। इस स्टैक में, रोबोट आर्म किसी भी ब्लू डिस्क को उसके निर्दिष्ट स्थान पर ले जाएगा।
- छात्रों को इलेक्ट्रोमैग्नेट पर एक डिस्क रखने को कहें और प्रोजेक्ट शुरू करें तथा देखें कि उनका रोबोट आर्म किस प्रकार चलता है। उन्हें याद दिलाएं कि उन्हें प्रोजेक्ट की शुरुआत इलेक्ट्रोमैग्नेट से जुड़ी डिस्क से करनी चाहिए। यदि आवश्यक हो तोVEXcode GO में प्रोजेक्ट शुरू करने के चरणों की समीक्षा करें।
- छात्रों को अपने प्रोजेक्ट को सभी रंगीन डिस्कों के साथ कई बार जांचने को कहें, ताकि यह सुनिश्चित हो सके कि यह अपेक्षित रूप से काम कर रहा है।
- सुविधा प्रदान करनापरियोजना प्रवाह में सशर्त कथनों के बारे में बातचीत को सुविधाजनक बनाना, क्योंकि छात्र पैरामीटर बदलते हैं और अपनी परियोजनाओं का परीक्षण करते हैं। लैब 5 स्लाइड शो में दिए गए समाधान का उपयोग करके उनकी परियोजनाओं की जांच करें।
लैब 5 भाग 2 समाधान जब आप कमरे में घूमकर समूहों की जांच करें, तो चर्चा शुरू करने के लिए उनसे निम्नलिखित में से कुछ प्रश्न पूछें।
- यदि हम चाहते हैं कि तीनों रंग एक ही स्थान पर समाप्त हों तो आप कोड को कैसे बदलेंगे?
- मुझे बताएं कि यदि नेत्र संवेदक लाल रंग का पता लगा लेता है तो रोबोट भुजा किस प्रकार गति करेगी।
- क्या होगा यदि मेरा [यदि तो] ब्लॉकों में से एक [हमेशा] ब्लॉक के बाहर हो? क्या रोबोट आर्म अपेक्षानुसार काम करेगा? क्यों या क्यों नहीं?
- यदि मैं नेत्र संवेदक के सामने नारंगी किरण रखूं तो क्या होगा? क्या रोबोट भुजा इसे हिला सकेगी? बताएं कि परियोजना प्रवाह के संदर्भ में यह आगे क्यों नहीं बढ़ेगा।
- याद दिलाएंसमूहों को उनके डुप्लिकेट [f then] स्टैक को [Forever] ब्लॉक के अंदर रखने के लिए याद दिलाएं। यह उन संभावित त्रुटियों में से एक है जो छात्रों द्वारा अपनी परियोजनाएं बनाते समय हो सकती हैं।
विद्यार्थियों को याद दिलाएं कि प्रयास करना और असफल होना ठीक है! अंतिम परियोजना बनाने से पहले कई संस्करण हो सकते हैं। असफलता को स्वीकार करें, यह सीखने की प्रक्रिया का एक हिस्सा है।
- पूछेंविद्यार्थियों से पूछें कि रोबोट आर्म द्वारा लिए गए निर्णय उनके द्वारा प्रतिदिन लिए जाने वाले निर्णयों से कैसे मिलते-जुलते या भिन्न हैं।
वे किन नौकरियों के बारे में सोच सकते हैं जिनमें निर्णय लेने की आवश्यकता होती है?