
पृष्ठभूमि
इस इकाई में, छात्र रोबोटिक भुजा के मैनुअल से मोटरयुक्त और फिर स्वचालित तक के विकास का पता लगाएंगे, तथा यह भी जानेंगे कि इसे हाथ से, स्विचों के साथ और कोड का उपयोग करके किसी कार्य को पूरा करने के लिए कैसे नियंत्रित किया जा सकता है। पूरे यूनिट के दौरान छात्रों को मशीनीकरण, स्वचालन, परियोजना प्रवाह और सशर्त कथनों से संबंधित अवधारणाओं पर विचार करने और चर्चा करने तथा मानव और रोबोट प्रक्रियाओं के बीच संबंध बनाने का अवसर मिलेगा।
इस इकाई में निर्माण और विशेषताएं
इस इकाई में चार निर्माण हैं:
- एक मैनुअल रोबोट आर्म
- एक मोटर चालित रोबोट भुजा
- एक कोड रोबोट आर्म जो 1 अक्ष पर चलता है
- एक कोड रोबोट आर्म जो 2 अक्षों पर चलता है
इन बिल्डों को व्यक्तिगत रूप से पूरा किया जा सकता है (प्रत्येक लैब के लिए शुरुआत से बनाया गया), या एक संक्रमणकालीन बिल्ड के रूप में (पहले बिल्ड को बाद की लैबों में संशोधित किया जाता है)। प्रत्येक निर्माण की प्रमुख विशेषताएं इस प्रकार हैं:
रोबोट आर्म: मैन्युअल रूप से संचालित रोबोटिक आर्म जिसे एक ओर से दूसरी ओर घुमाने के लिए सफेद लंबी बीम को घुमाकर या आर्म को ऊपर और नीचे ले जाने के लिए नारंगी नॉब को घुमाकर नियंत्रित किया जाता है। इस निर्माण में डिस्क को उठाने के लिए उत्तर-दक्षिण चुंबक का उपयोग किया जाता है।
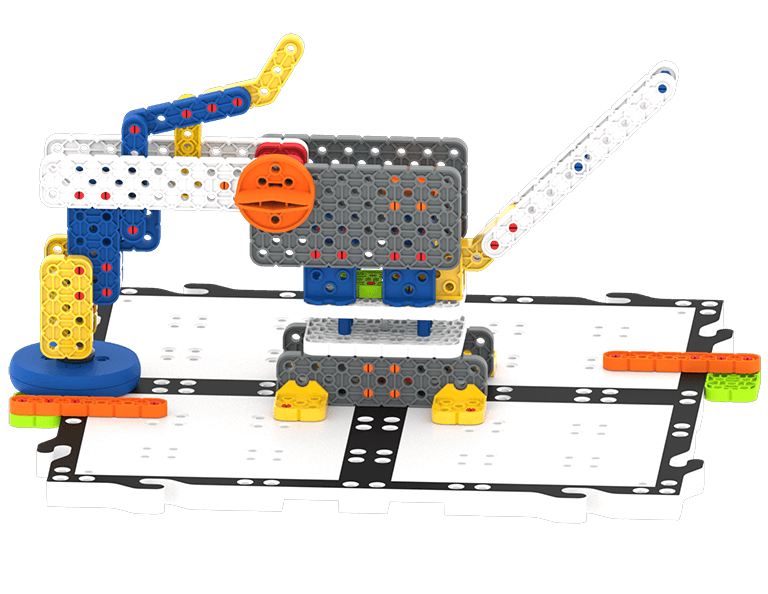
मोटराइज्ड रोबोट आर्म: एक रोबोटिक आर्म जो चलने के लिए मोटर और स्विच उपयोग करता है। मोटर और स्विच बैटरी से जुड़े होते हैं। इस निर्माण में डिस्क को उठाने के लिए उत्तर-दक्षिण चुंबक का भी उपयोग किया गया है।
- नोट: इस निर्माण में 1 रोबोटिक आर्म को पूरा करने के लिए 2 GO किट की आवश्यकता होती है।

कोड रोबोट आर्म (1-अक्ष): मोटरों और ब्रेन के साथ एक रोबोटिक आर्म जिसे 1 अक्ष पर एक तरफ से दूसरी तरफ जाने के लिए VEXcode GO का उपयोग करके नियंत्रित किया जाता है। इस निर्माण में एक आई सेंसरजोड़ा गया है, और डिस्क को उठाने के लिए एक इलेक्ट्रोमैग्नेट उपयोग किया गया है।

कोड रोबोट आर्म (2-अक्ष): अंतिम रोबोटिक आर्म निर्माण जो एक मोटर को दूसरे अक्ष पर हाथ को ऊपर और नीचे उठाने के लिए जोड़ता है। इस निर्माण में डिस्क को उठाने के लिए नेत्र संवेदक और विद्युत चुंबक का उपयोग जारी है।

वास्तविक जीवन में रोबोटिक भुजाएँ
रोबोटिक भुजा एक प्रकार की यांत्रिक भुजा होती है, जो आमतौर पर प्रोग्राम योग्य होती है, तथा मानव भुजा के समान कार्य करती है।

रोबोटिक भुजाएं, जो कई अलग-अलग दिशाओं में घूम सकती हैं, उन्हें कई अलग-अलग कार्य करने के लिए प्रोग्राम किया जा सकता है। इनमें से कुछ कार्यों में धातु वेल्डिंग, मशीनिंग, पेंटिंग, चीजों को जोड़ना, चीजों को अन्य मशीनों में रखना और वस्तुओं को छांटना शामिल है। ये रोबोट अक्सर ऐसे काम करते हैं जो नीरस, गंदे और खतरनाक होते हैं, इसलिए लोगों को उन्हें करने की आवश्यकता नहीं होती।

रोबोटिक भुजाओं को किसी भी प्रकार के उपकरण से सुसज्जित किया जा सकता है। इन उपकरणों का प्रयोग इतनी सटीकता, शुद्धता, गति और दोहराव के साथ किया जाता है कि मनुष्य इसकी बराबरी नहीं कर सकते। इस STEM लैब यूनिट में, छात्र अपने रोबोट आर्म को एक चुंबक और बाद में एक विद्युत चुंबक से सुसज्जित करेंगे।
ये रोबोटिक भुजाएं अपने व्यवहार के बारे में निर्णय लेने के लिए सेंसरों तथा सेंसरों से प्राप्त जानकारी का उपयोग कर सकती हैं। इकाई की बाद की प्रयोगशालाओं में, छात्र यह पता लगाएंगे कि नेत्र संवेदक कैसे काम करता है और इसका उपयोग रोबोट भुजा की गति को नियंत्रित करने के लिए कैसे किया जा सकता है।
औद्योगिक रोबोट और स्वचालन आज की दुनिया में उत्पादित अधिकांश उत्पादों के निर्माण का एक महत्वपूर्ण हिस्सा हैं। एक विस्तार गतिविधि के लिए, छात्रों से औद्योगिक रोबोटों पर शोध करने को कहें तथा उनके द्वारा उपयोग किए जाने वाले उत्पादों की सूची बनाने को कहें, जो रोबोटिक भुजा द्वारा बनाए गए हैं या छांटे गए हैं।
लैब समाधान समझाया गया
प्रयोगशाला 3-5 में, छात्र VEXcode GO का उपयोग करके ऐसे प्रोजेक्ट बनाएंगे जो इलेक्ट्रोमैग्नेट, नेत्र सेंसर, मोटर्स और मस्तिष्क का उपयोग करके रोबोट भुजा की गति को नियंत्रित करेंगे। लैब 3 इलेक्ट्रोमैग्नेट को सक्रिय करने और रोबोट आर्म को घुमाने के लिए बुनियादी प्रोग्रामिंग का परिचय देता है। लैब 4 और 5 में यह पता लगाया गया है कि कोड में निर्णय लेने के माध्यम से रोबोट आर्म को कैसे नियंत्रित किया जाए, और डिस्क को स्थानांतरित करने और रंग संवेदन के आधार पर निर्णय लेने के लिए बूलियन शर्तों, सशर्त कथनों और [हमेशा] ब्लॉक का उपयोग करके परियोजना प्रवाह का पता लगाया गया है।
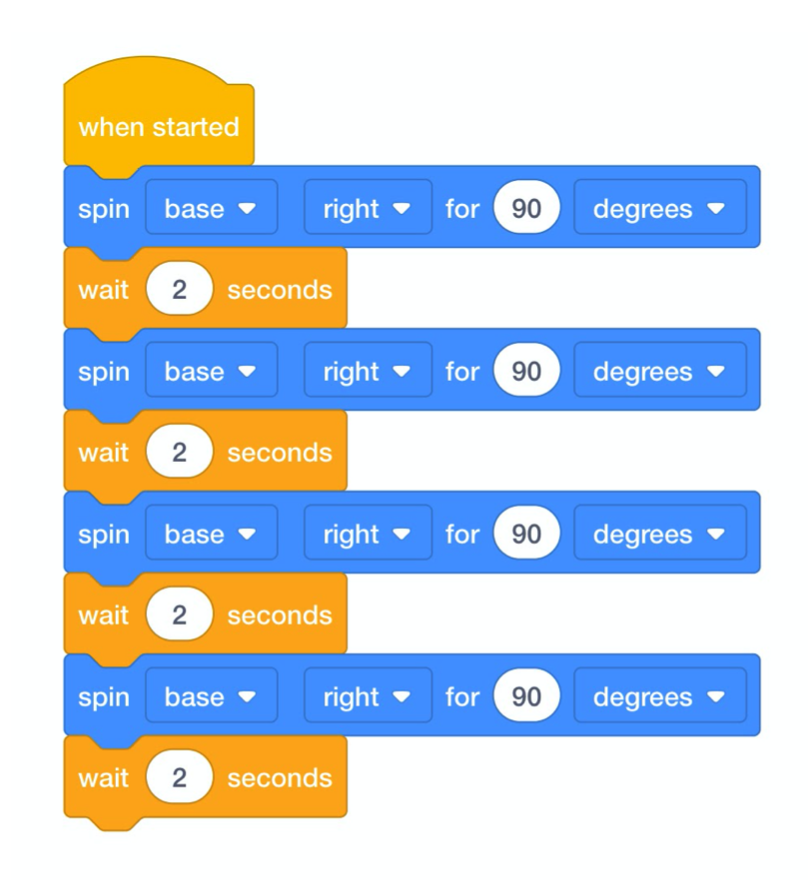
लैब 3 प्ले भाग 1 समाधान
इस परियोजना से रोबोट भुजा बनाई जाएगी:
- रोबोट आर्म को दाईं ओर घुमाएं (90 डिग्री तक)
- फिर, 2 सेकंड तक प्रतीक्षा करें।
- फिर, रोबोट आर्म को पूरी तरह घुमाकर उसे उसकी प्रारंभिक स्थिति में वापस लाने के लिए इस प्रक्रिया को 3 बार और दोहराएं।
लैब 3 खेल भाग 2 समाधान
इस परियोजना से रोबोट भुजा बनाई जाएगी:
- डिस्क को उठाने के लिए विद्युत चुम्बक को सक्रिय करें।
- फिर, डिस्क को स्थानांतरित करने के लिए रोबोट आर्म को दाईं ओर घुमाएं।
- डिस्क को किसी नए स्थान पर रखें।
- रोबोट आर्म को उसकी प्रारंभिक स्थिति में वापस लाएं।
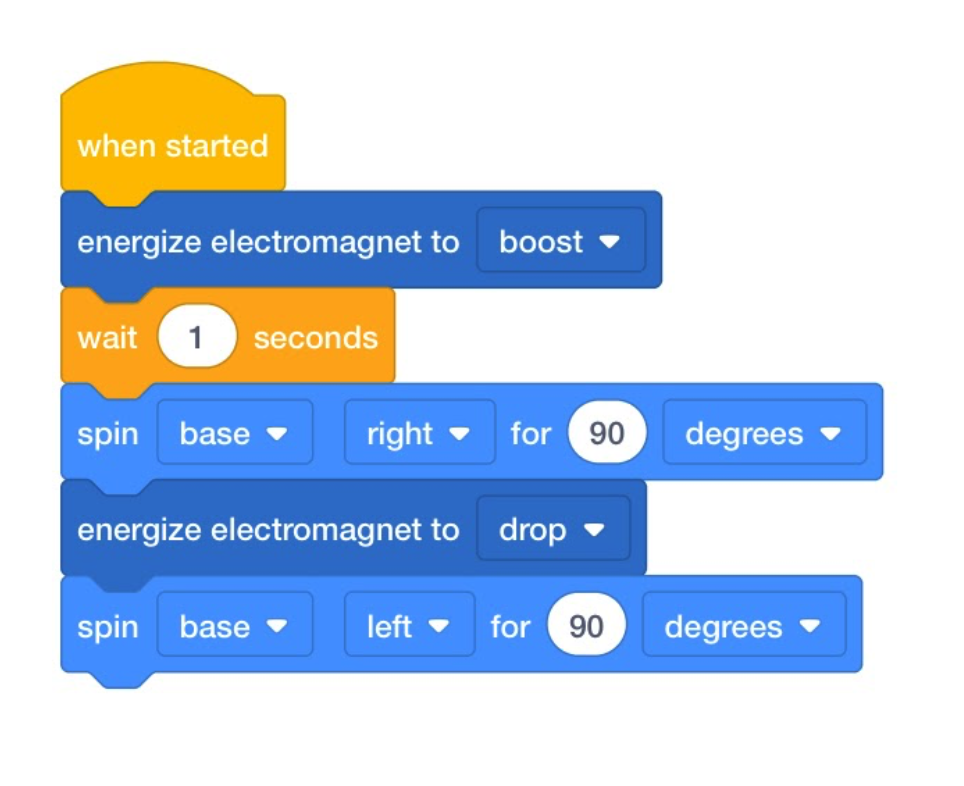
नोट: इस परिदृश्य में, डिस्क टाइल पर नारंगी किरण से टकराएगी, और चुंबक से अलग हो जाएगी। यह इच्छित व्यवहार है।
लैब 4 प्ले भाग 1 समाधान
इस परियोजना से रोबोट भुजा बनाई जाएगी:
- तब तक प्रतीक्षा करें जब तक नेत्र संवेदक को कोई वस्तु न मिल जाए।
- फिर, डिस्क को उठाने के लिए विद्युत चुंबक को सक्रिय करें।
- फिर, डिस्प्ले को स्थानांतरित करने के लिए रोबोट आर्म को दाईं ओर घुमाएं
- डिस्क को किसी नए स्थान पर रखें।
- रोबोट आर्म को उसकी प्रारंभिक स्थिति में वापस लाएं।

नोट: इस परिदृश्य में, डिस्क टाइल पर नारंगी किरण से टकराएगी, और चुंबक से अलग हो जाएगी। यह इच्छित व्यवहार है।
लैब 4 खेल भाग 2 समाधान
इस परियोजना से रोबोट भुजा बनाई जाएगी:
- तब तक प्रतीक्षा करें जब तक नेत्र संवेदक को कोई वस्तु न मिल जाए।
- फिर, डिस्क को उठाने के लिए विद्युत चुंबक को सक्रिय करें।
- फिर, डिस्क को ऊपर उठाने के लिए रोबोट आर्म को ऊपर ले जाएं।
- फिर, डिस्क को स्थानांतरित करने के लिए रोबोट आर्म को दाईं ओर घुमाएं।
- फिर, रोबोट आर्म को नीचे ले जाएं ताकि वह डिस्क को गिरा सके।
- रोबोट आर्म को उसकी प्रारंभिक स्थिति में वापस लाएं।
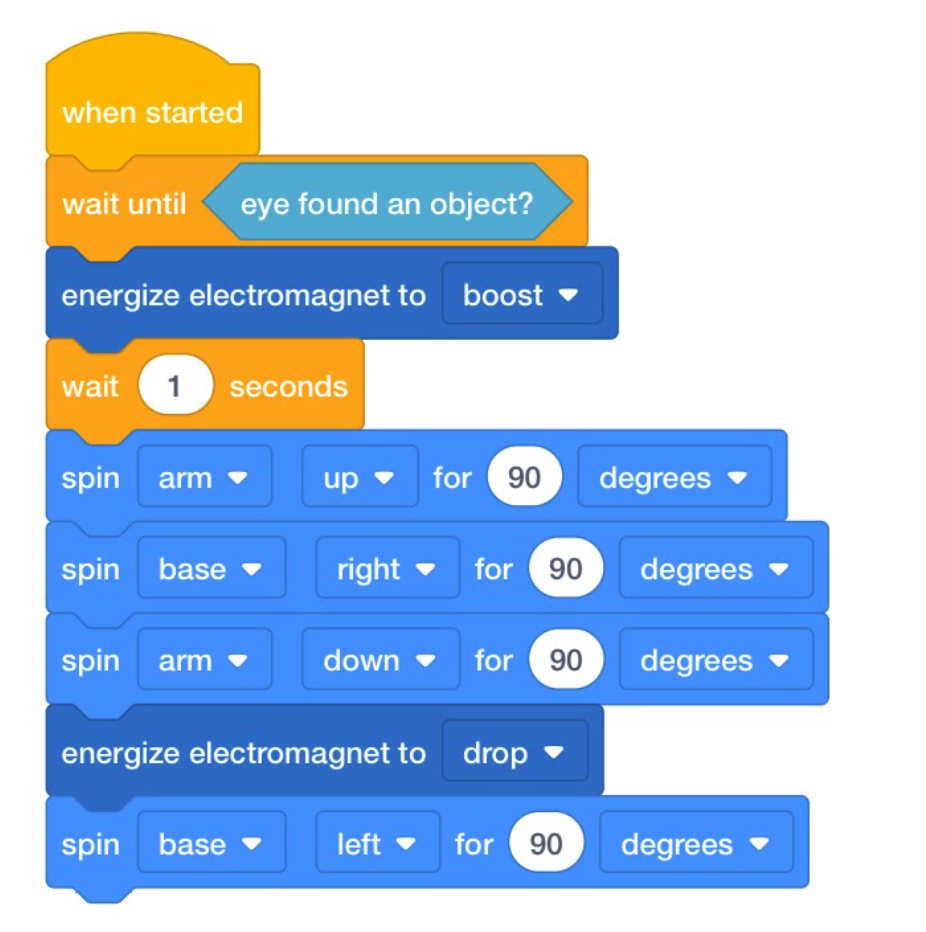
ये परियोजनाएं विद्युत चुंबक को सक्रिय करने से पहले नेत्र संवेदक द्वारा किसी वस्तु का पता लगाने तक प्रतीक्षा करने के लिए परियोजना के प्रवाह को नियंत्रित करने के लिए [Wait until] ब्लॉक का उपयोग करती हैं। यदि यह नेत्र संवेदक की प्रतीक्षा नहीं करता, तो विद्युत चुम्बक डिस्क को उठाए बिना ही गति कर लेता। इससे रोबोट को अपने नेत्र संवेदक से प्राप्त डेटा के आधार पर निर्णय लेने में सहायता मिलती है।
लैब 5 प्ले भाग 1 समाधान
इस परियोजना से रोबोट भुजा बनाई जाएगी:
- तब तक प्रतीक्षा करें जब तक नेत्र संवेदक को कोई वस्तु न मिल जाए।
- यदि वस्तु हरे रंग की है तो यह डिस्क को स्थानांतरित करेगी जैसा कि लैब 4 में किया गया था।
- रोबोट आर्म स्टैक के चारों ओर [फॉरएवर] ब्लॉक के कारण लगातार हरे रंग की वस्तु की जांच करेगा।
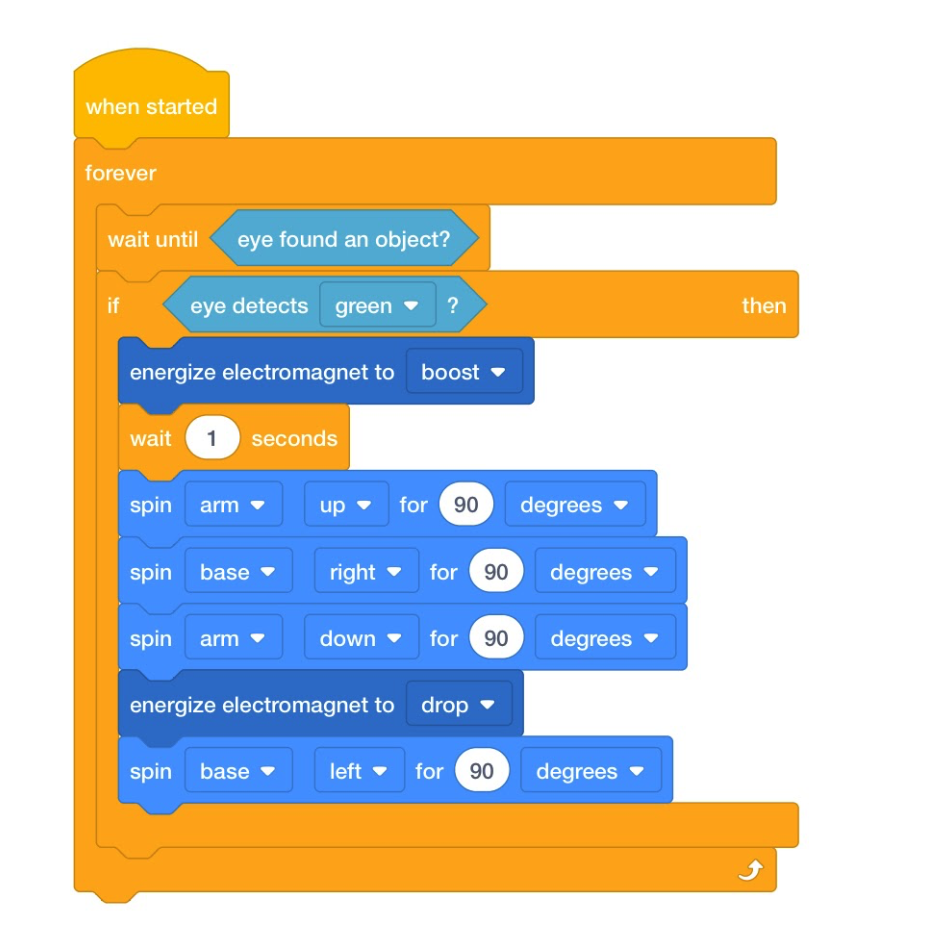
लैब 5 खेल भाग 2 समाधान
इस परियोजना से रोबोट भुजा बनाई जाएगी:
- तब तक प्रतीक्षा करें जब तक नेत्र संवेदक को कोई वस्तु न मिल जाए।
- यदि वस्तु हरे रंग की है, तो रोबोट आर्म डिस्क को उठाएगा और उसे 90 डिग्री पर दाईं ओर ले जाएगा, फिर डिस्क को नीचे गिरा देगा और अपनी प्रारंभिक स्थिति में वापस आ जाएगा।
- यदि वस्तु लाल है, तो रोबोट आर्म डिस्क को उठाएगा और उसे 180 डिग्री पर दाईं ओर ले जाएगा, फिर डिस्क को नीचे गिरा देगा और अपनी प्रारंभिक स्थिति में वापस आ जाएगा।
- यदि वस्तु नीली है, तो रोबोट आर्म डिस्क को उठाएगा और उसे 90 डिग्री पर बाईं ओर ले जाएगा, फिर डिस्क को नीचे गिरा देगा और अपनी प्रारंभिक स्थिति में वापस आ जाएगा।
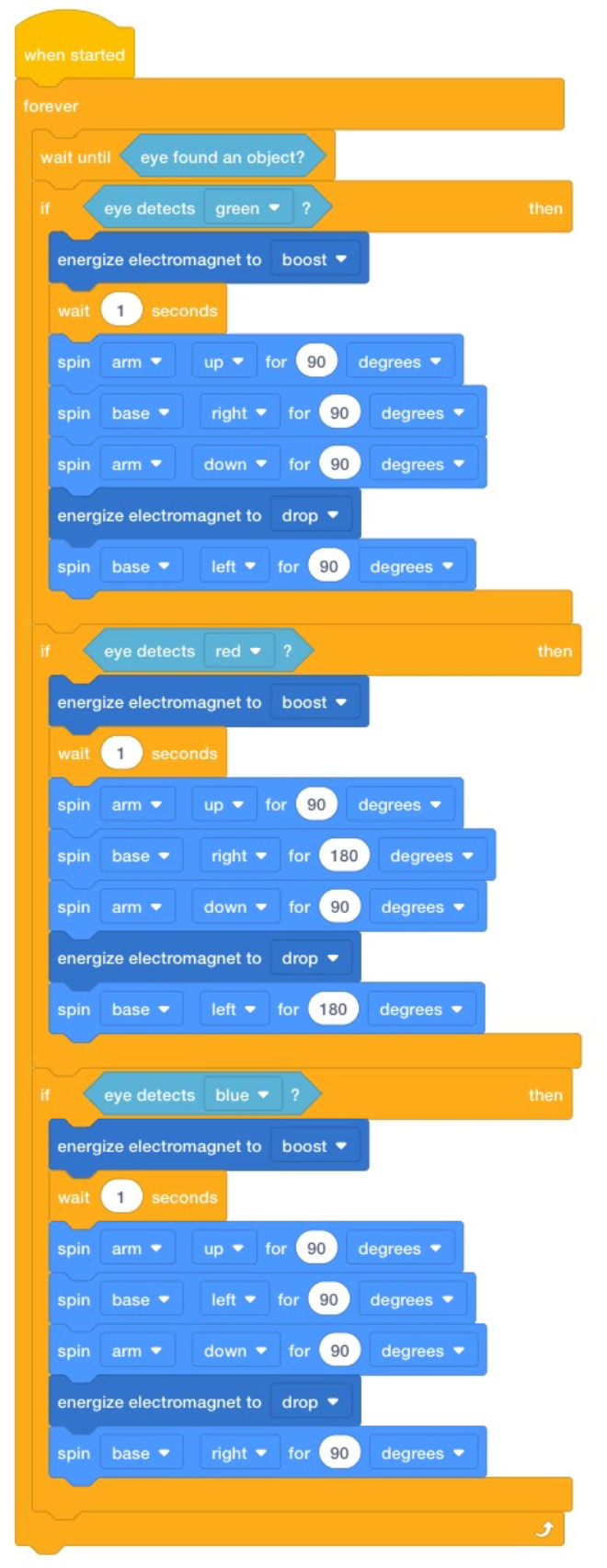
ये परियोजनाएं सशर्त कथन जोड़ती हैं, जिससे रोबोट नेत्र संवेदक से प्राप्त डेटा के आधार पर बार-बार निर्णय ले सके। इन्हें दोहराया जाता है क्योंकि [फॉरएवर] ब्लॉक का उपयोग रोबोट को लगातार वस्तुओं की जांच करने के लिए कहने के लिए किया जाता है।
इन परियोजनाओं में प्रयुक्त व्यक्तिगत ब्लॉकों के बारे में अधिक जानकारी के लिए, VEXcode GO में सहायता सुविधा उपयोग करें। ब्लॉक आकृतियों और उनके अर्थों के बारे में अधिक जानकारी के लिए, VEX लाइब्रेरी में ब्लॉक आकृतियाँ और अर्थ लेख देखें। यदि आप इन कोड समाधानों के पीछे कंप्यूटर विज्ञान अवधारणाओं के बारे में अधिक जानना चाहते हैं, कंप्यूटर विज्ञान बुनियादी बातों शिक्षक प्रमाणन पाठ्यक्रम आपके लिए हो सकता है।
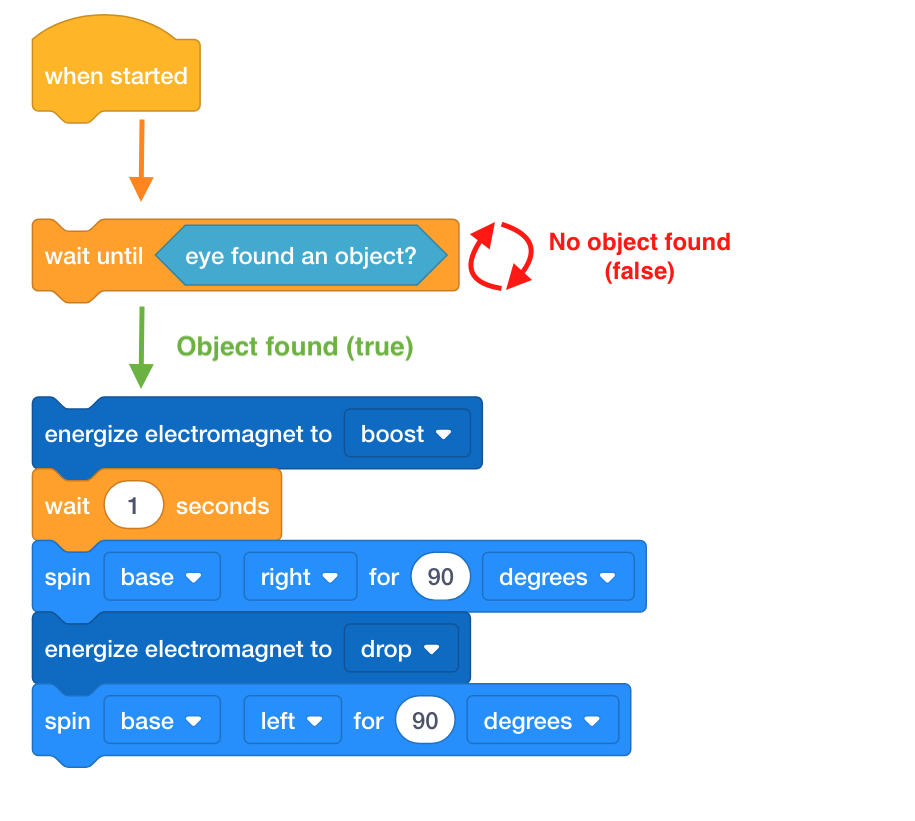
प्रोजेक्ट फ्लो क्या है?
प्रोजेक्ट फ्लो उस क्रम का वर्णन करता है जिसमें किसी प्रोजेक्ट में ब्लॉक निष्पादित किए जाते हैं। सभी परियोजनाएं ऊपर से नीचे की ओर प्रवाहित होती हैं, जो [जब शुरू हुई] हैट ब्लॉक से शुरू होती हैं। एक समय में केवल एक ब्लॉक निष्पादित किया जाता है, और जब एक ब्लॉक अपनी क्रियाएं या व्यवहार पूरा कर लेता है, तो परियोजना स्वचालित रूप से अगले ब्लॉक पर चली जाती है। कुछ नियंत्रण ब्लॉक (नारंगी रंग के) किसी शर्त या पैरामीटर मान के आधार पर परियोजना प्रवाह को संशोधित कर सकते हैं। उदाहरण के लिए, इस परियोजना में, [Wait until] ब्लॉक परियोजना के प्रवाह को रोक देगा, और “wait until” शर्त (इस मामले में, क्या नेत्र संवेदक ने कोई वस्तु ढूंढी) पूरी हो जाएगी। एक बार जब वह शर्त पूरी हो जाती है (नेत्र संवेदक को कोई वस्तु मिल जाती है, तो ब्लॉक TRUE मान की रिपोर्ट करता है), [Wait until] ब्लॉक समाप्त हो जाएगा और परियोजना में अगले ब्लॉक पर चला जाएगा।
VEX GO टुकड़े
रोबोट आर्म यूनिट में प्रयुक्त VEX GO किट के टुकड़ों और इलेक्ट्रॉनिक्स के बारे में अधिक विस्तृत जानकारी के लिए, VEX GO किट में टुकड़े VEX लाइब्रेरी आलेख देखें।