
Fondo
En esta unidad, los estudiantes explorarán la evolución de un brazo robótico de manual a motorizado y luego a automatizado, y cómo se puede controlar para realizar una tarea a mano, con interruptores y usando código. A lo largo de la Unidad, los estudiantes tendrán la oportunidad de pensar y discutir conceptos relacionados con la mecanización, la automatización, el flujo del proyecto y las declaraciones condicionales, y de hacer conexiones entre los procesos humanos y robóticos.
Construcciones y características de esta unidad
Hay cuatro compilaciones en esta unidad:
- Un brazo robótico manual
- Un brazo robótico motorizado
- Un brazo robótico de código que se mueve en 1 eje
- Un brazo robótico de código que se mueve en 2 ejes
Estas compilaciones se pueden completar de forma individual (construidas desde cero para cada laboratorio) o como una compilación de transición (la primera compilación se modifica en los laboratorios posteriores). Las características principales de cada versión incluyen:
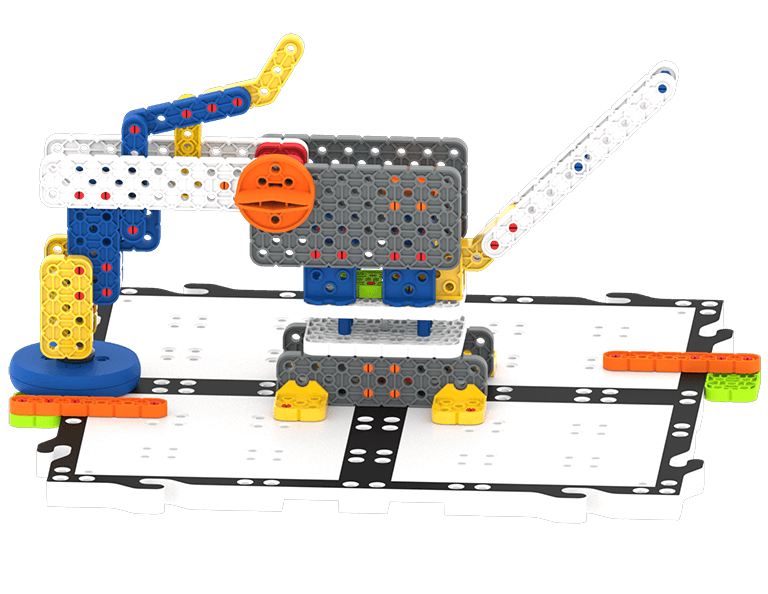
Brazo robótico: Un brazo robótico operado manualmente que se controla moviendo la viga larga blanca para girarlo de lado a lado, o las perillas naranjas para mover el brazo hacia arriba y hacia abajo. Esta construcción utiliza un imán Norte-Sur para levantar los discos.
Brazo robótico motorizado: Un brazo robótico que utiliza motores y interruptores moverse. Los motores y los interruptores están conectados a una batería. Esta construcción también utiliza un imán Norte-Sur para levantar los discos.
- Nota: Esta construcción requiere 2 kits GO para completar 1 brazo robótico.
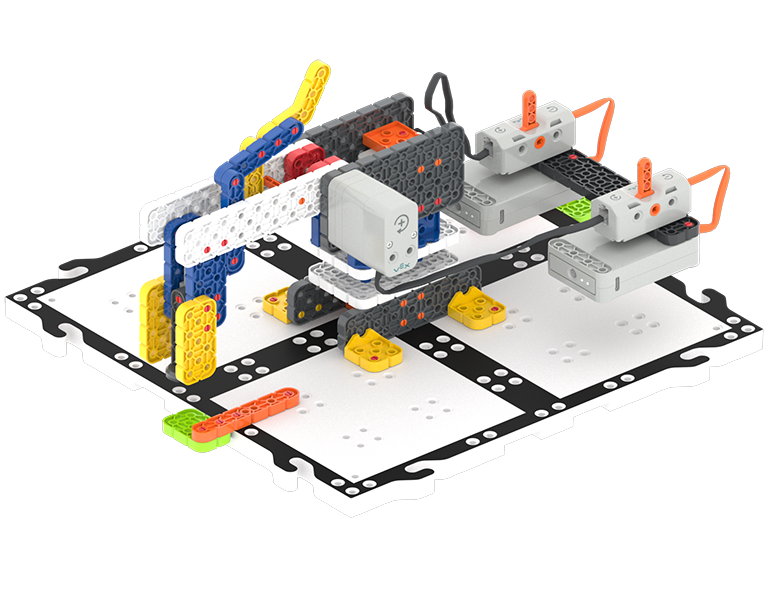
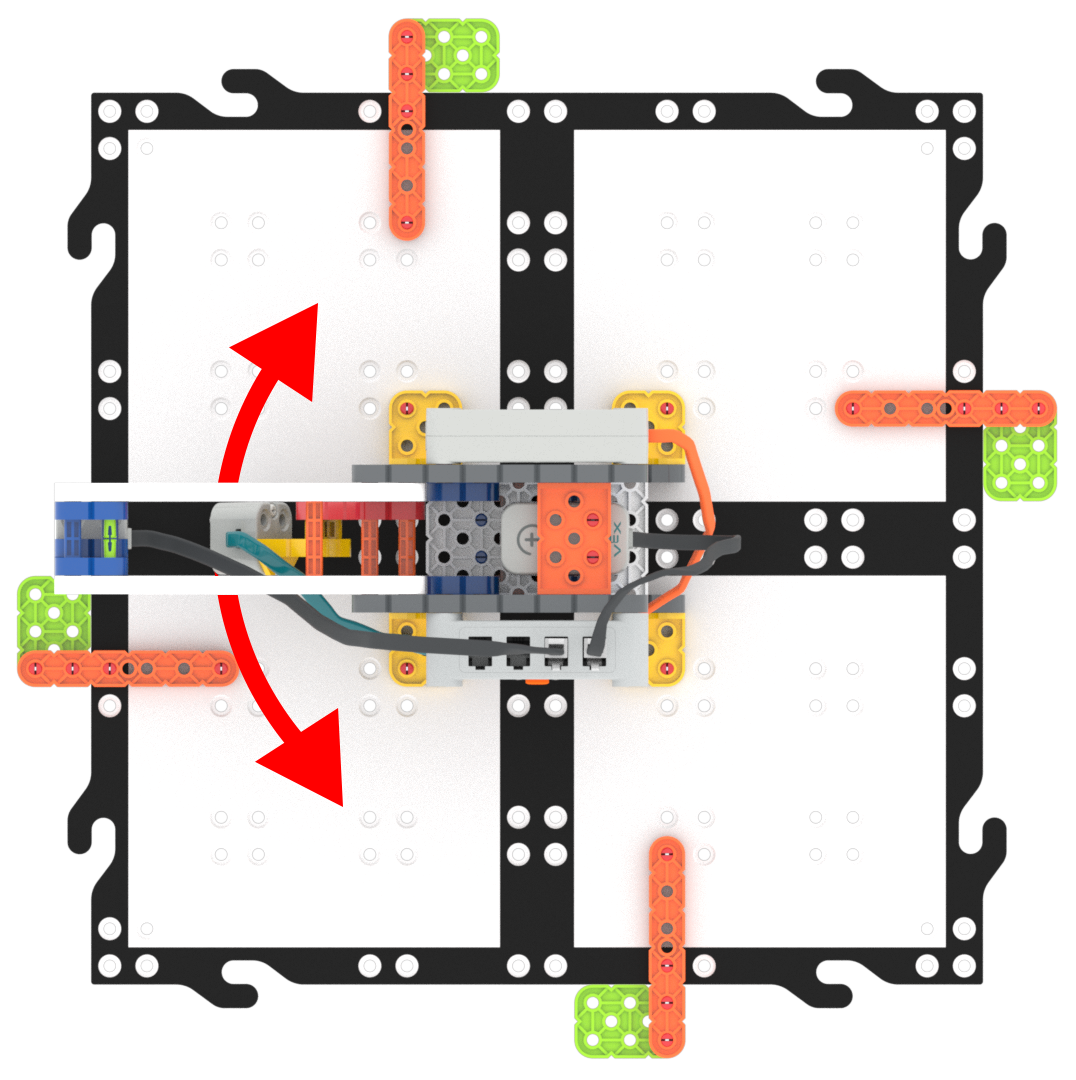
Brazo robótico de código (1 eje): Un brazo robótico con motores y un Cerebro que se controla usando VEXcode GO para avanzar 1 Eje: de lado a lado. Esta construcción agrega un Sensor ocular, y utiliza un Electroimán levantar los discos.
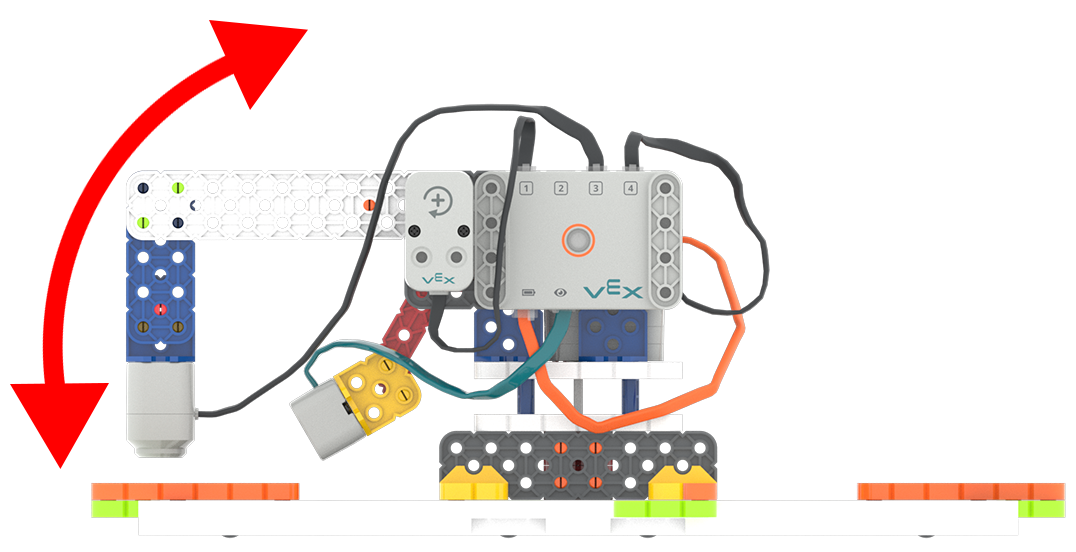
Código de brazo robótico (2 ejes): La construcción final del brazo robótico que agrega un motor para levantar el brazo en un segundo eje, arriba y abajo. Esta construcción continúa utilizando el sensor ocular y el electroimán para levantar los discos.
Brazos robóticos en la vida real
Un brazo robótico es un tipo de brazo mecánico, generalmente programable, que funciona de manera similar a un brazo humano.

Los brazos robóticos, que pueden moverse en varias direcciones diferentes, pueden programarse para realizar muchas tareas diferentes. Algunas de estas tareas incluyen soldar metal, mecanizar, pintar, ensamblar cosas, colocar cosas en otras máquinas y clasificar objetos. Estos robots a menudo realizan trabajos aburridos, sucios y peligrosos para que la gente no tenga que hacerlos.

Los brazos robóticos pueden equiparse con cualquier tipo de herramienta. Estas herramientas se utilizan con una precisión, exactitud, velocidad y repetitividad que los humanos no pueden igualar. En esta unidad de laboratorio STEM, los estudiantes equiparán su brazo robótico con un imán y, luego, con un electroimán.
Estos brazos robóticos pueden usar sensores e información de ellos para tomar decisiones sobre su comportamiento. En los laboratorios posteriores de la unidad, los estudiantes explorarán cómo funciona el sensor ocular y cómo se puede utilizar para controlar el movimiento del brazo robótico.
Los robots industriales y la automatización son una parte importante de la fabricación de la mayoría de los productos producidos en el mundo actual. Para una actividad de extensión, haga que los estudiantes investiguen sobre robots industriales y hagan una lista de los productos que utilizan que hayan sido fabricados o clasificados por un brazo robótico.
Soluciones de laboratorio explicadas
En los laboratorios 3 a 5, los estudiantes usarán VEXcode GO para crear proyectos que controlen el movimiento del brazo robótico utilizando el electroimán, el sensor ocular, los motores y el cerebro. El laboratorio 3 presenta la programación básica para energizar el electroimán y girar el brazo robótico. Los laboratorios 4 y 5 exploran cómo controlar el brazo robótico a través de la toma de decisiones en código, y exploran el flujo del proyecto utilizando condiciones booleanas, declaraciones condicionales y el bloque [Forever] para mover discos y tomar decisiones basadas en la detección de color.
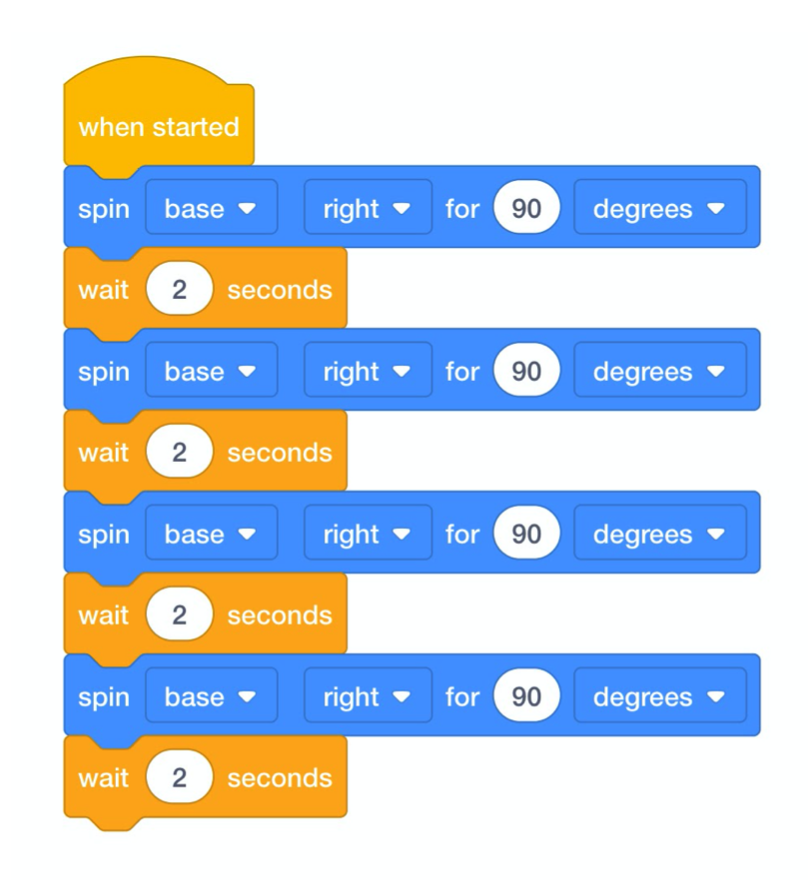
Solución de la parte 1 del juego del laboratorio 3
Este proyecto hará el brazo robótico:
- Gire el brazo robótico hacia la derecha (90 grados).
- Luego, espera 2 segundos.
- Luego, repite ese proceso 3 veces más, para girar el brazo robótico completamente y regresarlo a su posición inicial.
Solución de la parte 2 del juego del laboratorio 3
Este proyecto hará el brazo robótico:
- Energice el electroimán para recoger el disco.
- Luego, gira el brazo robótico hacia la derecha para mover el disco.
- Coloque el disco en una nueva ubicación.
- Devuelva el brazo robótico a su posición inicial.
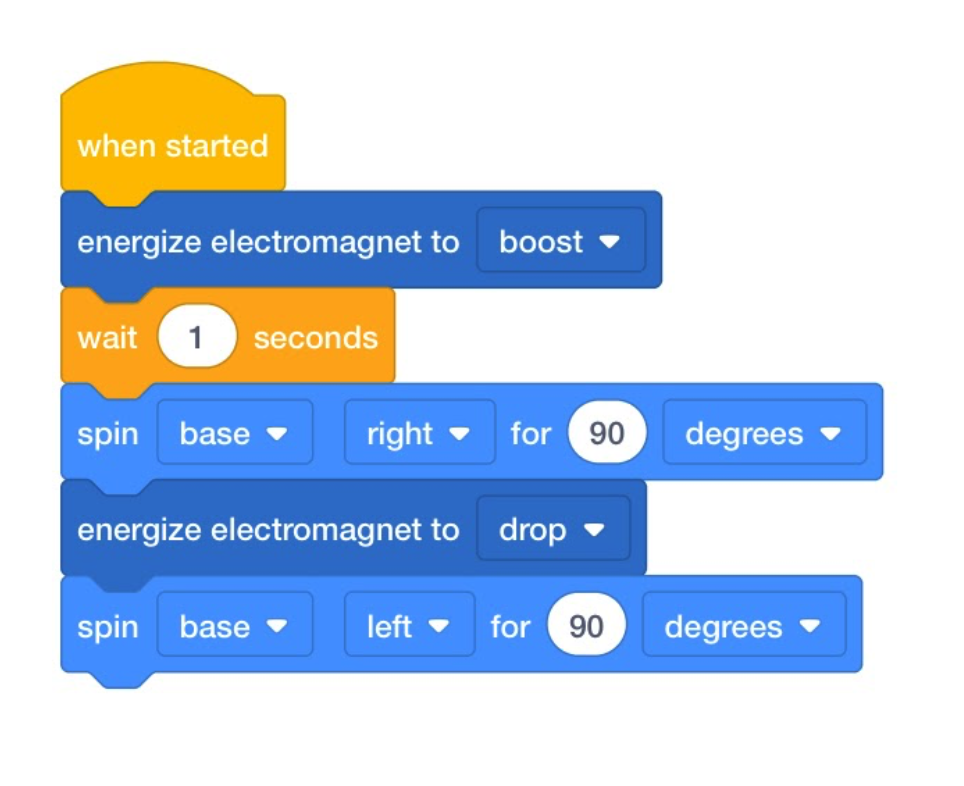
Nota: En este escenario, el disco golpeará el rayo naranja en la baldosa y debería separarse del imán. Éste es el comportamiento previsto.
Solución de la parte 1 del laboratorio 4 Play
Este proyecto hará el brazo robótico:
- Espere hasta que el sensor ocular encuentre un objeto.
- Luego, energice el electroimán para recoger el disco.
- Luego, gira el brazo robótico hacia la derecha para mover el disco.
- Coloque el disco en una nueva ubicación.
- Devuelva el brazo robótico a su posición inicial.
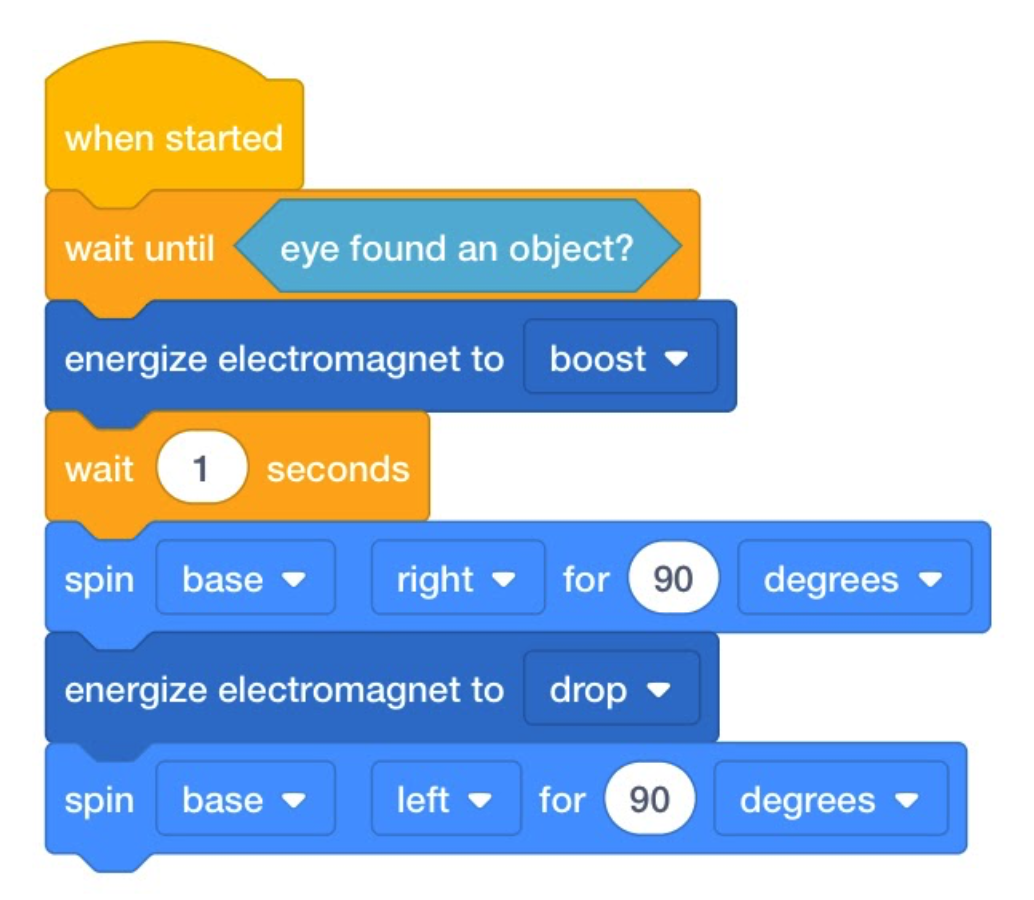
Nota: En este escenario, el disco golpeará el rayo naranja en la baldosa y debería separarse del imán. Éste es el comportamiento previsto.
Solución de la parte 2 del laboratorio 4 Play
Este proyecto hará el brazo robótico:
- Espere hasta que el sensor ocular encuentre un objeto.
- Luego, energice el electroimán para recoger el disco.
- Luego, mueva el brazo robótico hacia ARRIBA para levantar el disco.
- Luego, gira el brazo robótico hacia la derecha para mover el disco.
- Luego, mueva el brazo robótico hacia ABAJO para que pueda soltar el disco.
- Regrese el brazo robótico a su posición inicial.
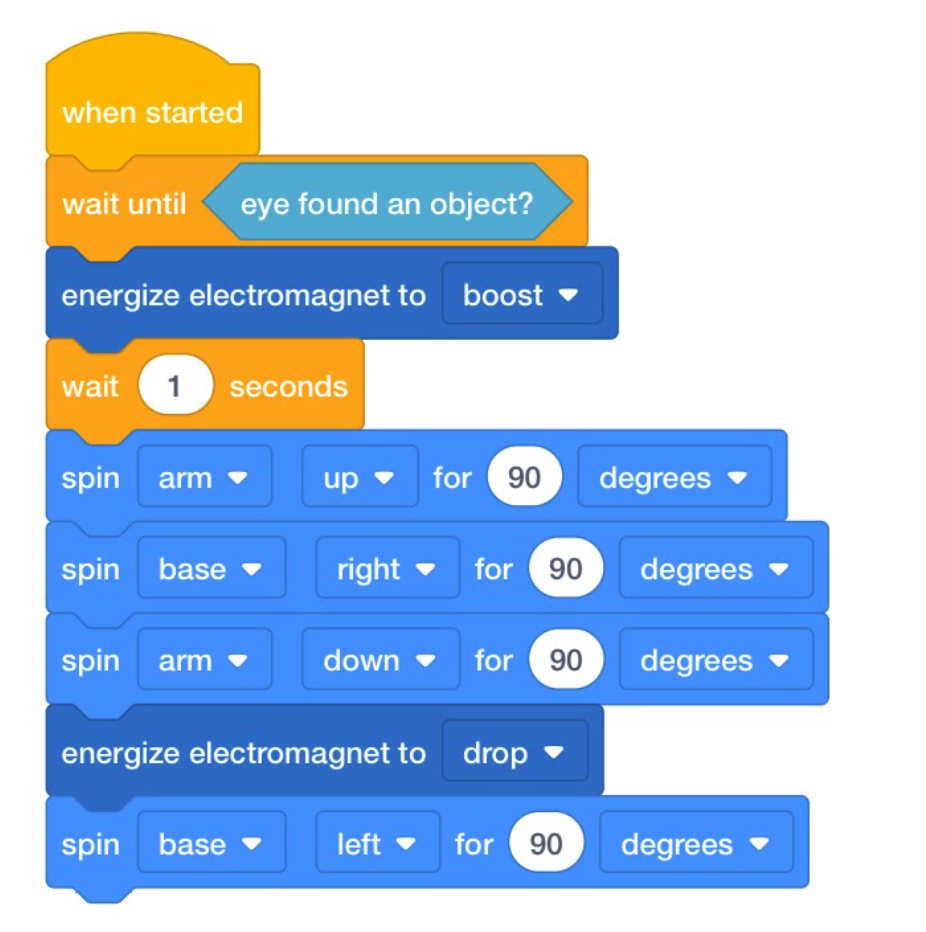
Estos proyectos utilizan el bloque [Esperar hasta] para controlar el flujo del proyecto para esperar hasta que el sensor ocular detecte un objeto antes de energizar el electroimán. Si no esperara al sensor ocular, el electroimán se movería sin recoger el disco. Esto permite que el robot tome una decisión basada en los datos que recibe de su sensor ocular.
Solución de la parte 1 del juego del laboratorio 5
Este proyecto hará el brazo robótico:
- Espere hasta que el sensor ocular encuentre un objeto.
- Si el objeto es verde, moverá el disco como lo hizo en el Laboratorio 4.
- El brazo robótico buscará continuamente un objeto verde debido al bloque [Para siempre] alrededor de la pila.
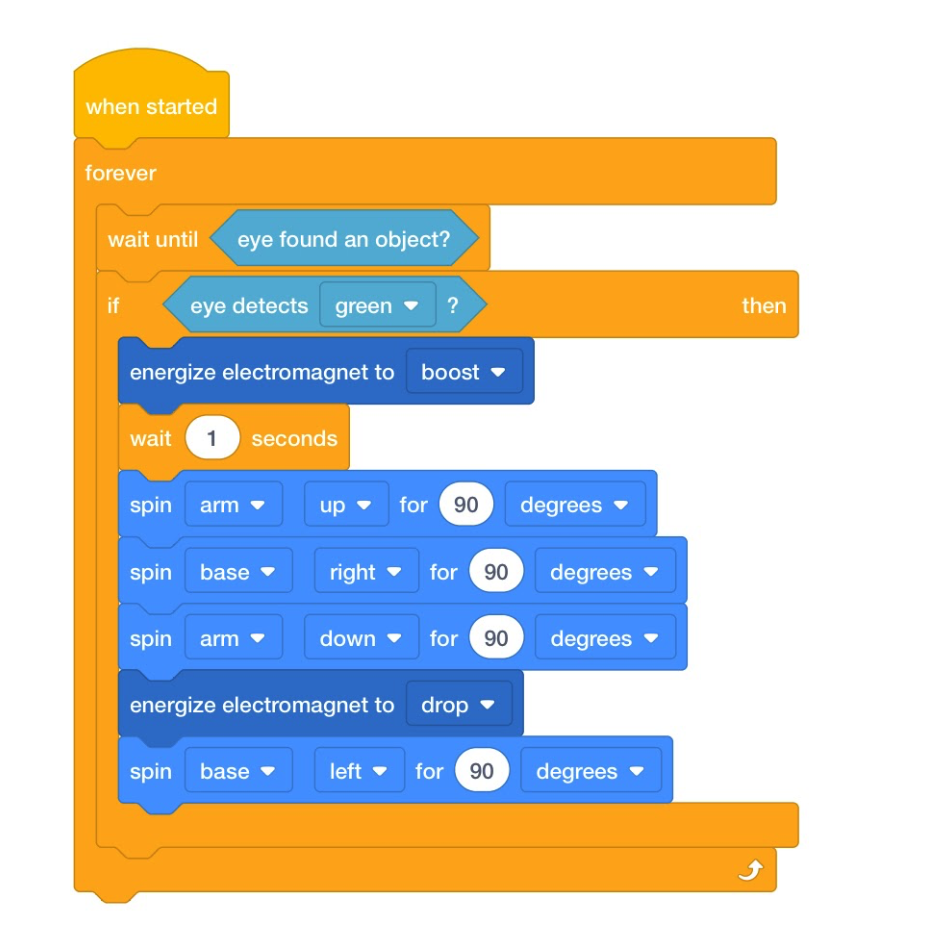
Solución de la parte 2 del juego de laboratorio 5
Este proyecto hará el brazo robótico:
- Espere hasta que el sensor ocular encuentre un objeto.
- Si el objeto es verde, el brazo robótico levantará el disco y lo moverá 90 grados hacia la derecha, luego soltará el disco y regresará a su posición inicial.
- Si el objeto es rojo, el brazo robótico levantará el disco y lo moverá 180 grados hacia la derecha, luego soltará el disco y regresará a su posición inicial.
- Si el objeto es azul, el brazo robótico levantará el disco y lo moverá 90 grados hacia la izquierda, luego soltará el disco y regresará a su posición inicial.
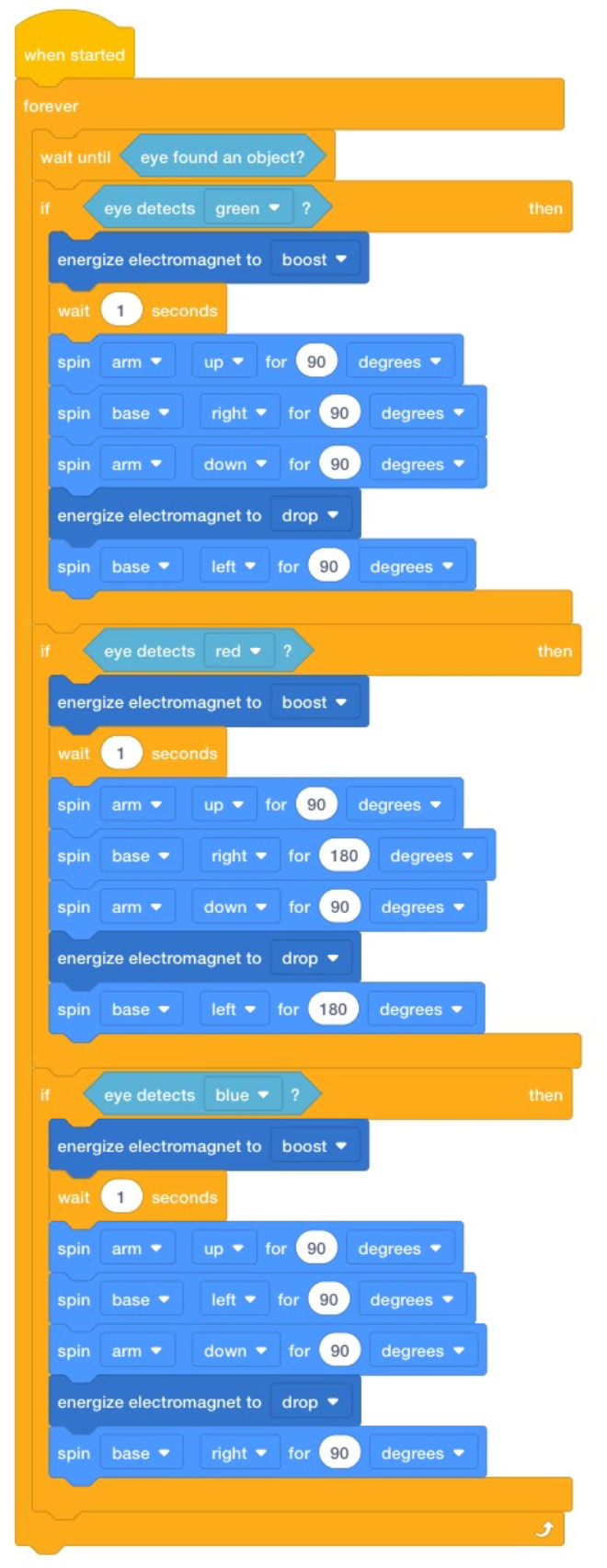
Estos proyectos agregan declaraciones condicionales para permitir que el robot tome decisiones repetidas basadas en los datos del sensor ocular. Se repiten porque el bloque [Siempre] se usa para indicarle al robot que verifique continuamente si hay objetos.
Para obtener más información sobre los bloques individuales utilizados en estos proyectos, utilice el Ayuda característica en código VEX GO. Para obtener más información sobre las formas de los bloques y sus significados, consulte laBlock Formas y significados artículo en la biblioteca VEX. Si desea obtener más información sobre el Conceptos de informática detrás de estas soluciones de código, el Fundamentos de informática Curso de certificación de educadores podría ser para ti.
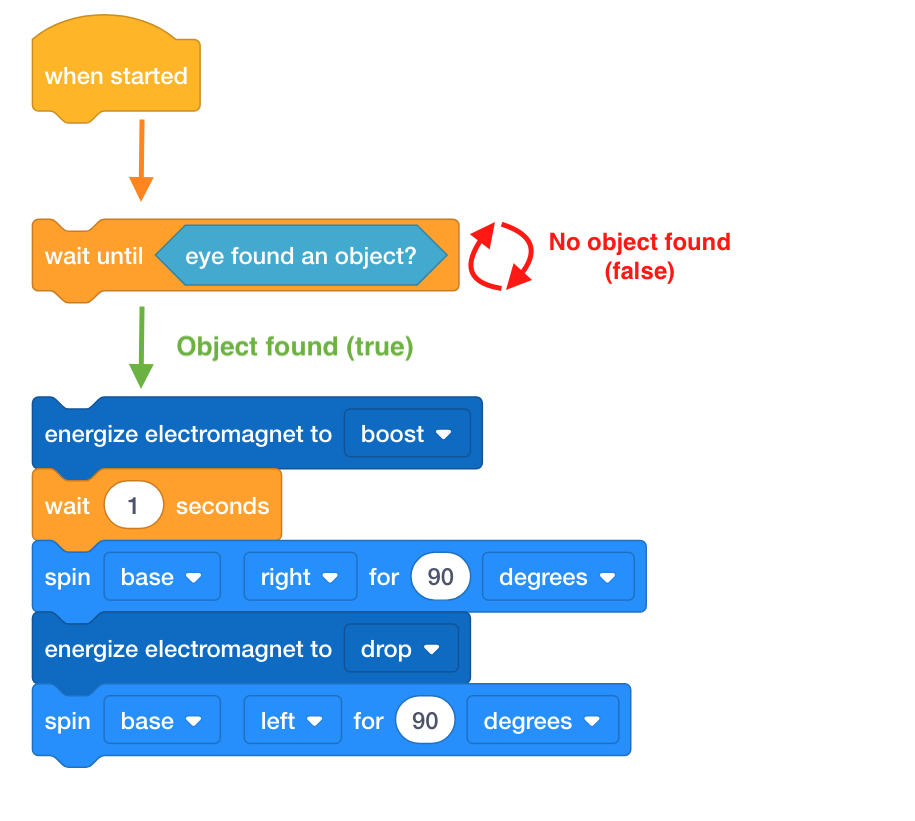
¿Qué es el flujo del proyecto?
El flujo del proyecto describe el orden en que se ejecutan los bloques en un proyecto. Todos los proyectos fluyen de arriba hacia abajo, comenzando desde el bloque de sombrero [Cuándo se inicia]. Sólo se ejecuta un bloque a la vez, y una vez que un bloque ha completado sus acciones o comportamientos, el proyecto pasa al siguiente bloque automáticamente. Ciertos bloques de control (de color naranja) pueden modificar el flujo del proyecto, en función de una condición o un valor de parámetro. En este proyecto, por ejemplo, el bloque [Esperar hasta] detendrá el flujo del proyecto y “esperará hasta que” se cumpla la condición (en este caso, si el sensor ocular encontró un objeto). Una vez que se cumple esa condición (el sensor ocular encontró un objeto, por lo que el bloque informa un valor VERDADERO), el bloque [Esperar hasta] finalizará y pasará al siguiente bloque del proyecto.
Piezas de VEX GO
Para obtener información más detallada sobre las piezas del kit VEX GO y los componentes electrónicos utilizados en la unidad del brazo robótico, consulte la Piezas en el equipo VEX GO Artículo de la biblioteca VEX.