
পটভূমি
এই ইউনিটে, শিক্ষার্থীরা ম্যানুয়াল থেকে মোটরচালিত থেকে স্বয়ংক্রিয় পর্যন্ত একটি রোবোটিক বাহুর বিবর্তন এবং কীভাবে এটি হাতে, সুইচ এবং কোড ব্যবহার করে কোনও কাজ সম্পন্ন করার জন্য নিয়ন্ত্রণ করা যেতে পারে তা অন্বেষণ করবে। পুরো ইউনিট জুড়ে শিক্ষার্থীরা যান্ত্রিকীকরণ, অটোমেশন, প্রকল্প প্রবাহ এবং শর্তসাপেক্ষ বিবৃতি সম্পর্কিত ধারণাগুলি নিয়ে চিন্তাভাবনা এবং আলোচনা করার এবং মানব এবং রোবোটিক প্রক্রিয়াগুলির মধ্যে সংযোগ স্থাপনের সুযোগ পাবে।
এই ইউনিটের বিল্ড এবং বৈশিষ্ট্যগুলি
এই ইউনিটে চারটি বিল্ড রয়েছে:
- একটি ম্যানুয়াল রোবট বাহু
- একটি মোটরচালিত রোবট বাহু
- একটি কোড রোবট আর্ম যা ১ অক্ষে চলে
- একটি কোড রোবট আর্ম যা দুটি অক্ষের উপর চলে
এই বিল্ডগুলি পৃথকভাবে সম্পন্ন করা যেতে পারে (প্রতিটি ল্যাবের জন্য স্ক্র্যাচ থেকে তৈরি), অথবা একটি ট্রানজিশনাল বিল্ড হিসাবে (প্রথম বিল্ডটি পরবর্তী ল্যাবগুলিতে পরিবর্তিত হয়)। প্রতিটি বিল্ডের মূল বৈশিষ্ট্যগুলির মধ্যে রয়েছে:
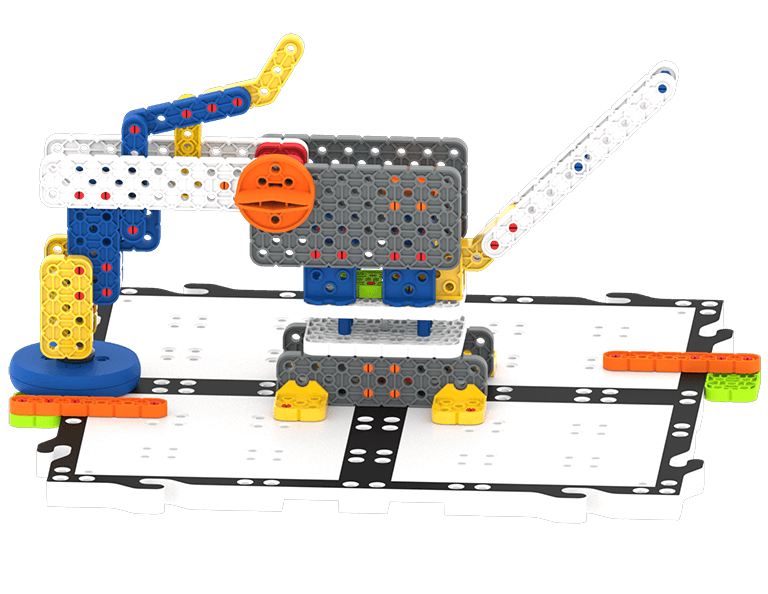
রোবট বাহু: টি ম্যানুয়ালি পরিচালিত রোবটিক বাহু যা সাদা লম্বা রশ্মিটি এদিক-ওদিক ঘুরিয়ে অথবা কমলা রঙের নবগুলি দিয়ে বাহুটি উপরে-নিচে নাড়াচাড়া করে নিয়ন্ত্রিত হয়। এই বিল্ডটি ডিস্কগুলি তুলতে উত্তর-দক্ষিণ চুম্বক ব্যবহার করে।
মোটরচালিত রোবট বাহু: একটি রোবটিক বাহু যা চলাচলের জন্য মোটর এবং সুইচ ব্যবহার করে। মোটর এবং সুইচগুলি একটি ব্যাটারির সাথে সংযুক্ত। এই বিল্ডটি ডিস্কগুলি তুলতে উত্তর-দক্ষিণ চুম্বক ব্যবহার করে।
- দ্রষ্টব্য: এই বিল্ডটিতে ১টি রোবোটিক আর্ম সম্পূর্ণ করতে ২টি GO কিট প্রয়োজন।

কোড রোবট আর্ম (১-অক্ষ): মোটর এবং ব্রেন সহ একটি রোবটিক আর্ম যা VEXcode GO ব্যবহার করে ১ অক্ষে এপাশ-ওপাশ ঘোরানোর জন্য নিয়ন্ত্রিত হয়। এই বিল্ডটিতে একটি আই সেন্সরযোগ করা হয়েছে, এবং ডিস্কগুলি তুলতে একটি ইলেক্ট্রোম্যাগনেট ব্যবহার করা হয়েছে।

কোড রোবট আর্ম (২-অক্ষ): চূড়ান্ত রোবটিক আর্ম বিল্ড যা বাহুটিকে দ্বিতীয় অক্ষে - উপরে এবং নীচে - তুলতে একটি মোটর যুক্ত করে। এই বিল্ডটি ডিস্কগুলি তুলতে আই সেন্সর এবং ইলেক্ট্রোম্যাগনেট ব্যবহার করে চলেছে।

বাস্তব জীবনে রোবোটিক অস্ত্র
রোবোটিক বাহু হল এক ধরণের যান্ত্রিক বাহু, সাধারণত প্রোগ্রামযোগ্য, যা মানুষের বাহুর মতোই কাজ করে।
রোবোটিক বাহু, যা বিভিন্ন দিকে চলতে পারে, অনেকগুলি বিভিন্ন কাজ সম্পাদনের জন্য প্রোগ্রাম করা যেতে পারে। এই কাজের মধ্যে কিছু হল ধাতু ঢালাই, মেশিনিং, রঙ করা, জিনিসপত্র একত্রিত করা, অন্যান্য মেশিনে জিনিসপত্র স্থাপন করা এবং জিনিসপত্র সাজানো। এই রোবটগুলি প্রায়শই এমন কাজ করে যা একঘেয়ে, নোংরা এবং বিপজ্জনক, তাই মানুষকে সেগুলি করতে হয় না।
রোবোটিক অস্ত্রগুলিতে যেকোনো ধরণের সরঞ্জাম সজ্জিত করা যেতে পারে। এই সরঞ্জামগুলি নির্ভুলতা, নির্ভুলতা, গতি এবং পুনরাবৃত্তির সাথে ব্যবহৃত হয় যা মানুষের দ্বারা তুলনা করা যায় না। এই STEM ল্যাব ইউনিটে, শিক্ষার্থীরা তাদের রোবট বাহুতে প্রথমে চুম্বক এবং পরে একটি তড়িৎচুম্বক ব্যবহার করবে।
এই রোবোটিক অস্ত্রগুলি তাদের আচরণ সম্পর্কে সিদ্ধান্ত নিতে সেন্সর এবং সেন্সর থেকে প্রাপ্ত তথ্য ব্যবহার করতে পারে। ইউনিটের পরবর্তী ল্যাবগুলিতে, শিক্ষার্থীরা আই সেন্সর কীভাবে কাজ করে এবং রোবট বাহুর গতিবিধি নিয়ন্ত্রণ করতে এটি কীভাবে ব্যবহার করা যেতে পারে তা অন্বেষণ করবে।
আজকের বিশ্বে উৎপাদিত বেশিরভাগ পণ্যের উৎপাদনের ক্ষেত্রে শিল্প রোবট এবং অটোমেশন একটি গুরুত্বপূর্ণ অংশ। একটি সম্প্রসারণ কার্যকলাপের জন্য, শিক্ষার্থীদের শিল্প রোবট নিয়ে গবেষণা করতে বলুন এবং তাদের ব্যবহৃত পণ্যগুলির একটি তালিকা তৈরি করতে বলুন যা একটি রোবোটিক হাত দ্বারা তৈরি বা সাজানো হয়েছে।
ল্যাব সমাধান ব্যাখ্যা করা হয়েছে
ল্যাবস ৩-৫-এ, শিক্ষার্থীরা VEXcode GO ব্যবহার করে এমন প্রকল্প তৈরি করবে যা ইলেক্ট্রোম্যাগনেট, আই সেন্সর, মোটর এবং মস্তিষ্ক ব্যবহার করে রোবট বাহুর গতিবিধি নিয়ন্ত্রণ করবে। ল্যাব ৩ ইলেক্ট্রোম্যাগনেটকে শক্তি যোগাতে এবং রোবট বাহুকে ঘোরানোর জন্য মৌলিক প্রোগ্রামিং প্রবর্তন করে। ল্যাব ৪ এবং ৫ কোডে সিদ্ধান্ত গ্রহণের মাধ্যমে রোবট আর্মকে কীভাবে নিয়ন্ত্রণ করতে হয় তা অন্বেষণ করে এবং বুলিয়ান কন্ডিশন, কন্ডিশনাল স্টেটমেন্ট এবং [ফরএভার] ব্লক ব্যবহার করে ডিস্ক সরাতে এবং রঙ সেন্সিংয়ের উপর ভিত্তি করে সিদ্ধান্ত নিতে প্রকল্প প্রবাহ অন্বেষণ করে।
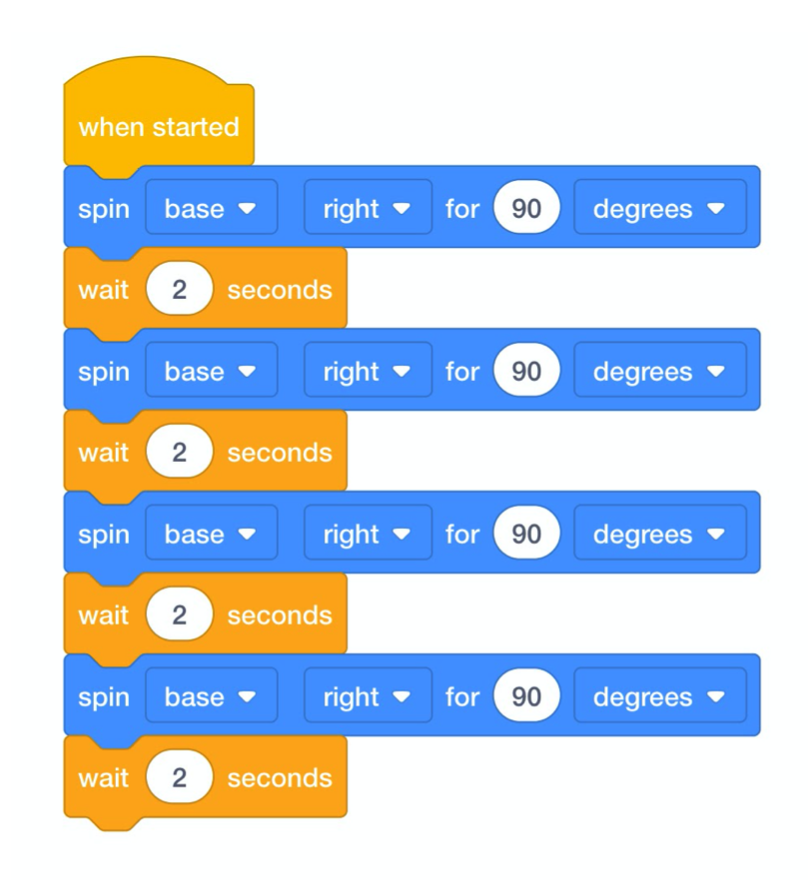
ল্যাব ৩ প্লে পার্ট ১ সলিউশন
এই প্রকল্পটি রোবট বাহু তৈরি করবে:
- রোবটের বাহু ডানদিকে ঘোরান (৯০ ডিগ্রির জন্য।)
- তারপর, ২ সেকেন্ড অপেক্ষা করুন।
- তারপর, রোবট আর্মটিকে সম্পূর্ণরূপে ঘুরিয়ে দেওয়ার জন্য এবং এটিকে তার শুরুর অবস্থানে ফিরিয়ে আনার জন্য, সেই প্রক্রিয়াটি আরও 3 বার পুনরাবৃত্তি করুন।
ল্যাব ৩ প্লে পার্ট ২ সলিউশন
এই প্রকল্পটি রোবট বাহু তৈরি করবে:
- ডিস্কটি তুলতে ইলেক্ট্রোম্যাগনেটকে শক্তি দিন।
- তারপর, ডিস্কটি সরাতে রোবট আর্মটি ডানদিকে ঘোরান।
- ডিস্কটি একটি নতুন স্থানে ফেলে দিন।
- রোবট আর্মটিকে তার শুরুর অবস্থানে ফিরিয়ে আনুন।
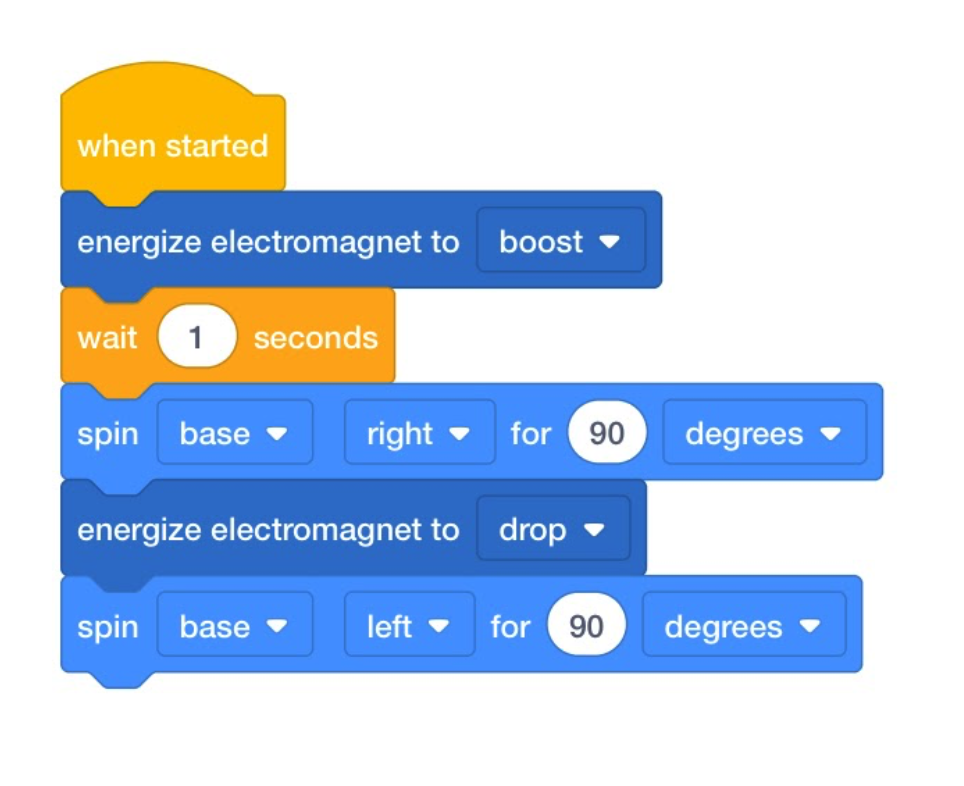
দ্রষ্টব্য: এই পরিস্থিতিতে, ডিস্কটি টাইলের কমলা রঙের রশ্মিতে আঘাত করবে এবং চুম্বক থেকে আলাদা হয়ে যাবে। এটাই উদ্দেশ্যপ্রণোদিত আচরণ।
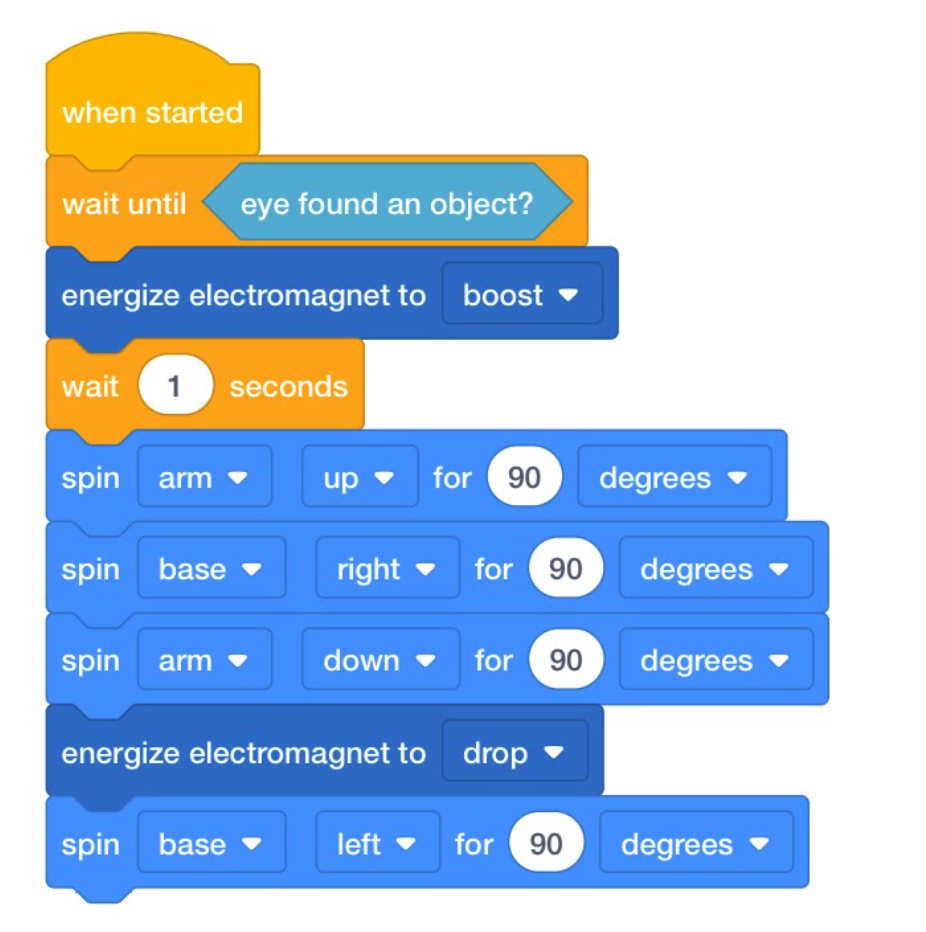
ল্যাব ৪ প্লে পার্ট ১ সলিউশন
এই প্রকল্পটি রোবট বাহু তৈরি করবে:
- আই সেন্সর কোনও বস্তু খুঁজে না পাওয়া পর্যন্ত অপেক্ষা করুন।
- তারপর, ডিস্কটি তুলে নেওয়ার জন্য ইলেক্ট্রোম্যাগনেটকে শক্তি দিন।
- তারপর, ডিস্কটি সরাতে রোবট আর্মটি ডানদিকে ঘোরান।
- ডিস্কটি একটি নতুন স্থানে ফেলে দিন।
- রোবট আর্মটিকে তার শুরুর অবস্থানে ফিরিয়ে আনুন।
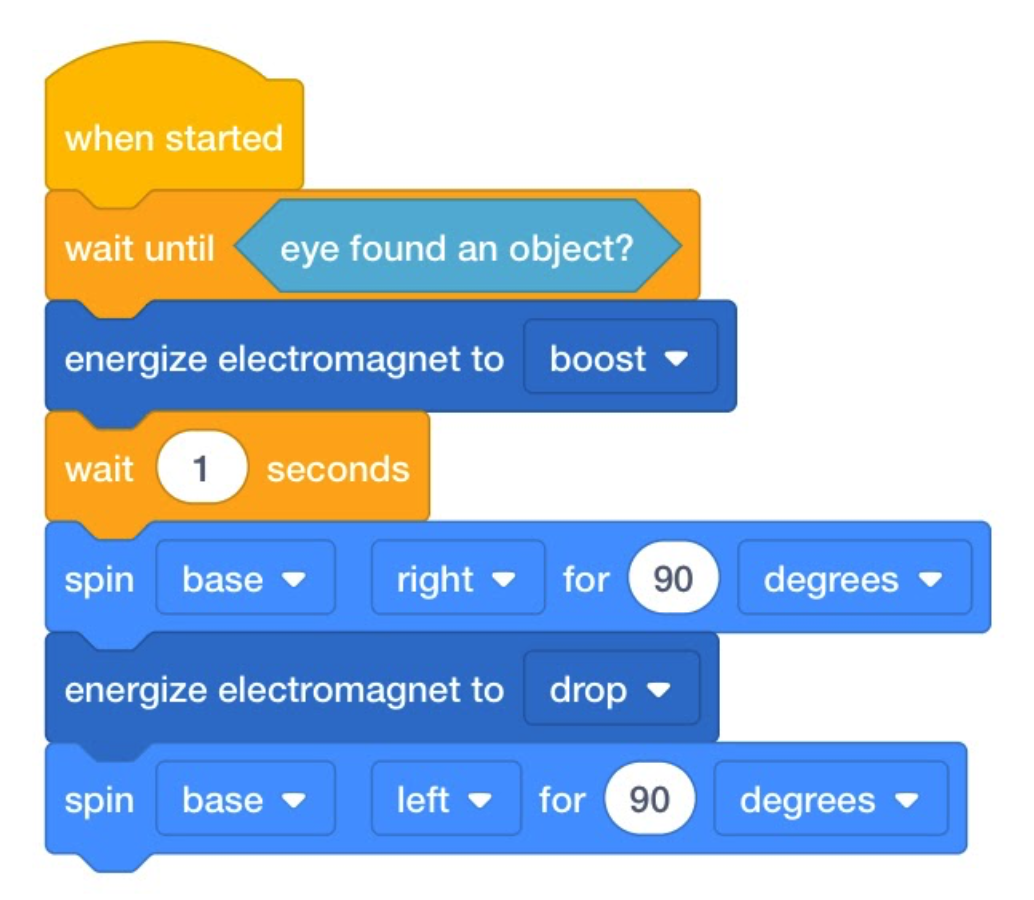
দ্রষ্টব্য: এই পরিস্থিতিতে, ডিস্কটি টাইলের কমলা রঙের রশ্মিতে আঘাত করবে এবং চুম্বক থেকে আলাদা হয়ে যাবে। এটাই উদ্দেশ্যপ্রণোদিত আচরণ।
ল্যাব ৪ প্লে পার্ট ২ সলিউশন
এই প্রকল্পটি রোবট বাহু তৈরি করবে:
- আই সেন্সর কোনও বস্তু খুঁজে না পাওয়া পর্যন্ত অপেক্ষা করুন।
- তারপর, ডিস্কটি তুলে নেওয়ার জন্য ইলেক্ট্রোম্যাগনেটকে শক্তি দিন।
- তারপর, ডিস্কটি তুলতে রোবট আর্মটিকে উপরে সরান।
- তারপর, ডিস্কটি সরাতে রোবট আর্মটি ডানদিকে ঘোরান।
- তারপর, রোবট আর্মটি নীচে সরান যাতে এটি ডিস্কটি ফেলে দিতে পারে।
- রোবট বাহুটিকে তার শুরুর অবস্থানে ফিরিয়ে আনুন।
এই প্রকল্পগুলি [অপেক্ষা করুন] ব্লক ব্যবহার করে প্রকল্পের প্রবাহ নিয়ন্ত্রণ করে যাতে আই সেন্সর কোনও বস্তু সনাক্ত না করে এবং এটি ইলেক্ট্রোম্যাগনেটকে শক্তি দেয়। যদি এটি আই সেন্সরের জন্য অপেক্ষা না করত, তাহলে ইলেক্ট্রোম্যাগনেটটি ডিস্কটি না তুলেই নড়াচড়া করত। এটি রোবটটিকে তার আই সেন্সর থেকে প্রাপ্ত তথ্যের উপর ভিত্তি করে সিদ্ধান্ত নিতে সক্ষম করে।
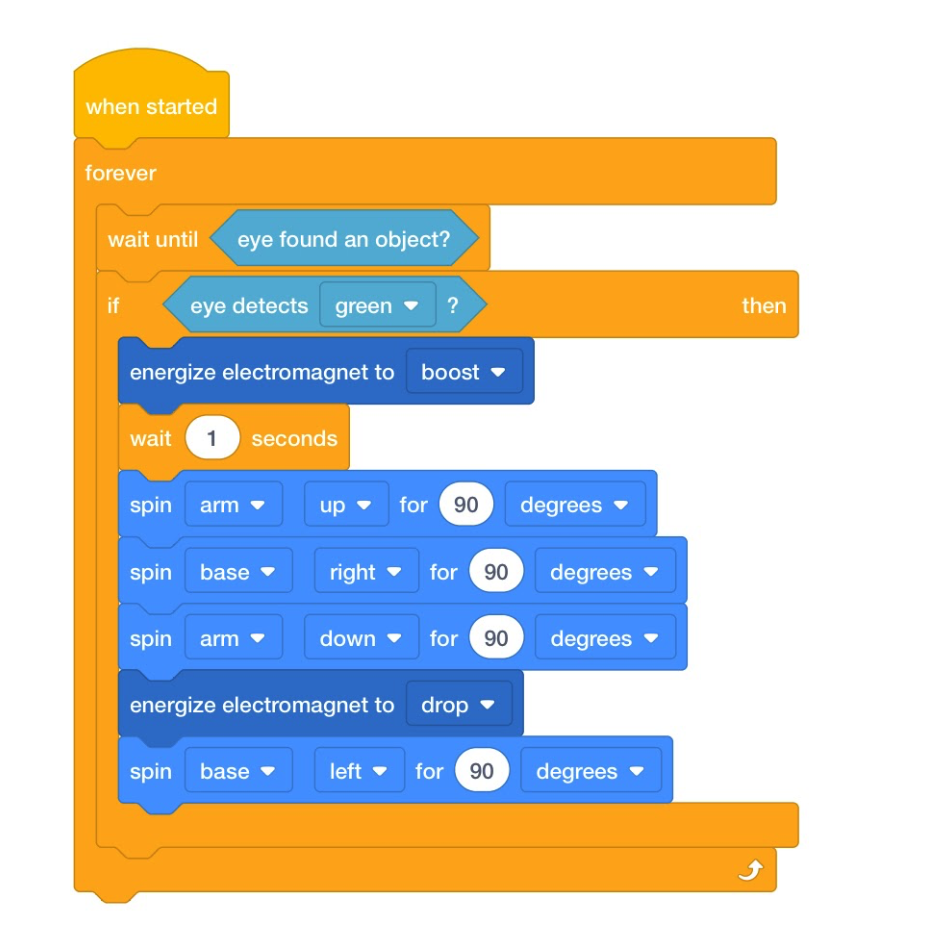
ল্যাব ৫ প্লে পার্ট ১ সলিউশন
এই প্রকল্পটি রোবট বাহু তৈরি করবে:
- আই সেন্সর কোনও বস্তু খুঁজে না পাওয়া পর্যন্ত অপেক্ষা করুন।
- যদি বস্তুটি সবুজ হয় তবে এটি ল্যাব ৪-এর মতো ডিস্কটিকে সরাবরাহ করবে।
- স্ট্যাকের চারপাশে [Forever] ব্লকের কারণে রোবট আর্ম ক্রমাগত সবুজ বস্তুর জন্য পরীক্ষা করবে।
ল্যাব ৫ প্লে পার্ট ২ সলিউশন
এই প্রকল্পটি রোবট বাহু তৈরি করবে:
- আই সেন্সর কোনও বস্তু খুঁজে না পাওয়া পর্যন্ত অপেক্ষা করুন।
- যদি বস্তুটি সবুজ হয়, তাহলে রোবট আর্ম ডিস্কটি তুলে ডানদিকে 90 ডিগ্রিতে নিয়ে যাবে, তারপর ডিস্কটি ফেলে দেবে এবং তার শুরুর অবস্থানে ফিরে যাবে।
- যদি বস্তুটি লাল হয়, তাহলে রোবট আর্ম ডিস্কটি তুলে ডানদিকে ১৮০ ডিগ্রি সরাব, তারপর ডিস্কটি ফেলে তার শুরুর অবস্থানে ফিরে যাবে।
- যদি বস্তুটি নীল রঙের হয়, তাহলে রোবট আর্ম ডিস্কটি তুলে 90 ডিগ্রি বাম দিকে নিয়ে যাবে, তারপর ডিস্কটি ফেলে দেবে এবং তার শুরুর অবস্থানে ফিরে যাবে।
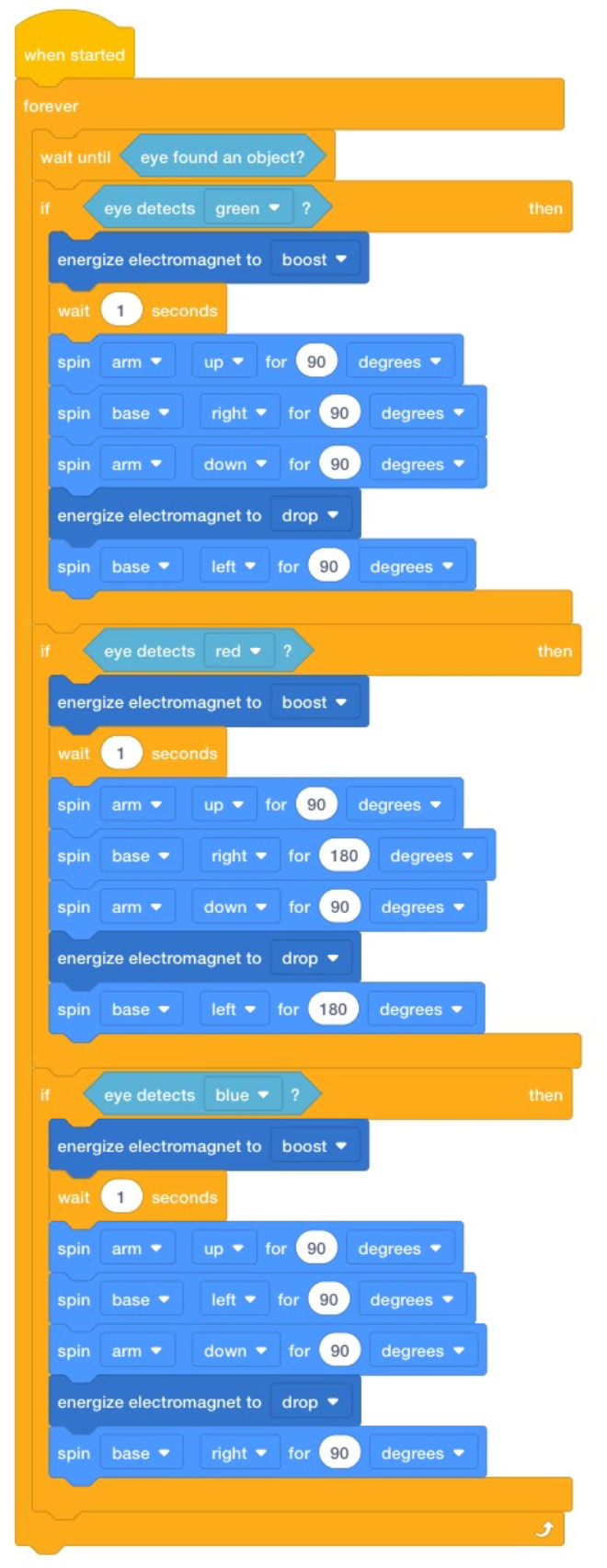
এই প্রকল্পগুলি শর্তসাপেক্ষ বিবৃতি যুক্ত করে যাতে রোবট আই সেন্সর থেকে প্রাপ্ত তথ্যের উপর ভিত্তি করে বারবার সিদ্ধান্ত নিতে পারে। এগুলি পুনরাবৃত্তি করা হয় কারণ [চিরকালের] ব্লকটি রোবটকে ক্রমাগত বস্তু পরীক্ষা করতে বলার জন্য ব্যবহৃত হয়।
এই প্রকল্পগুলিতে ব্যবহৃত পৃথক ব্লক সম্পর্কে আরও তথ্যের জন্য, VEXcode GO-তে সহায়তা বৈশিষ্ট্য ব্যবহার করুন। ব্লক আকার এবং তাদের অর্থ সম্পর্কে আরও তথ্যের জন্য, VEX লাইব্রেরিতে ব্লক আকার এবং অর্থ নিবন্ধটি দেখুন। আপনি যদি এই কোড সমাধানগুলির পিছনে থাকা কম্পিউটার বিজ্ঞানের ধারণাগুলি সম্পর্কে আরও জানতে চান, তাহলে কম্পিউটার বিজ্ঞান মৌলিক শিক্ষাবিদ সার্টিফিকেশন কোর্স আপনার জন্য হতে পারে।
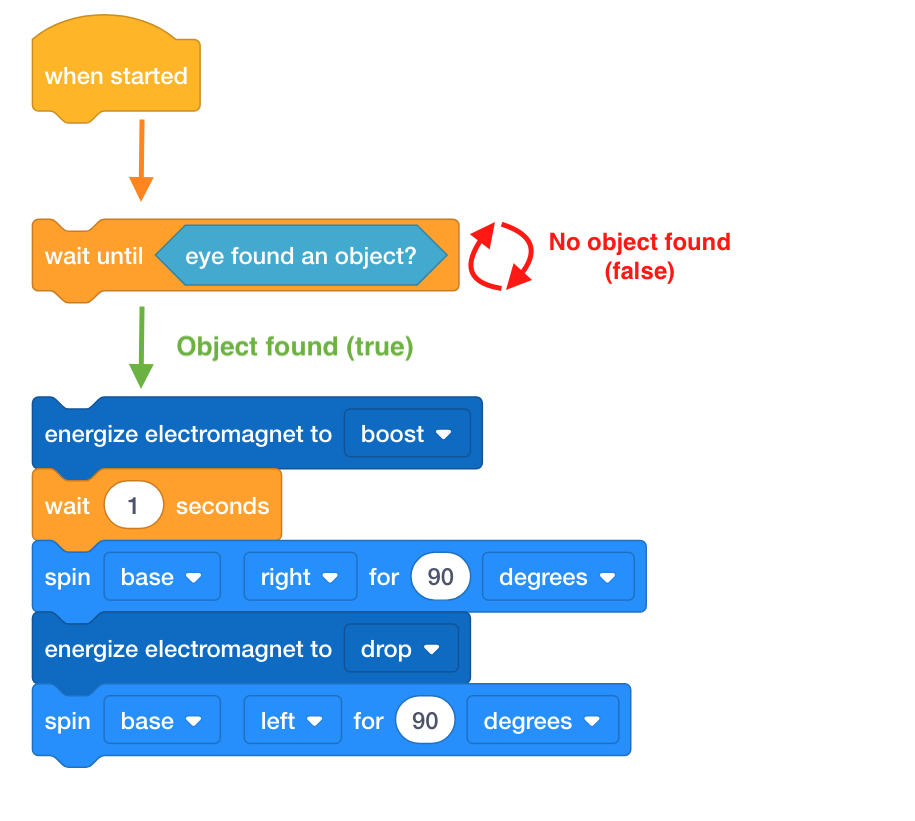
প্রজেক্ট ফ্লো বলতে কী বোঝায়?
প্রজেক্ট ফ্লো একটি প্রকল্পে ব্লকগুলি সম্পাদিত হয় এমন ক্রমটি বর্ণনা করে । [কখন শুরু হবে] হ্যাট ব্লক থেকে শুরু করে সমস্ত প্রকল্প উপরে থেকে নীচে প্রবাহিত হয় । একবারে কেবল একটি ব্লক কার্যকর করা হয় এবং একবার কোনও ব্লক তার ক্রিয়া বা আচরণ শেষ করার পরে, প্রকল্পটি স্বয়ংক্রিয়ভাবে পরবর্তী ব্লকে চলে যায় । কিছু কন্ট্রোল ব্লক (কমলা রঙের) একটি শর্ত বা প্যারামিটার মানের উপর ভিত্তি করে প্রকল্প প্রবাহ পরিবর্তন করতে পারে । এই প্রকল্পে, উদাহরণস্বরূপ, [অপেক্ষা করুন] ব্লকটি প্রকল্পের প্রবাহ বন্ধ করবে এবং "অপেক্ষা করুন" শর্তটি (এই ক্ষেত্রে, চোখের সেন্সরটি কোনও বস্তু খুঁজে পেয়েছিল) পূরণ হবে । একবার সেই শর্তটি পূরণ হয়ে গেলে (আই সেন্সর একটি বস্তু খুঁজে পেয়েছে, তাই ব্লকটি সত্যটির মান রিপোর্ট করে), [অপেক্ষা করুন] ব্লকটি শেষ হবে এবং প্রকল্পের পরবর্তী ব্লকে চলে যাবে ।
VEX Go Pieces
রোবট আর্ম ইউনিটে ব্যবহৃত VEX GO কিট টুকরা এবং ইলেকট্রনিক্স সম্পর্কে আরও বিস্তারিত তথ্যের জন্য, VEX GO কিট VEX লাইব্রেরি প্রবন্ধের টুকরা দেখুন।