
Latar belakang
Dalam Unit ini, siswa akan mengeksplorasi evolusi lengan robot dari manual ke bermotor hingga otomatis, dan bagaimana lengan robot dapat dikontrol untuk menyelesaikan tugas dengan tangan, dengan sakelar, dan menggunakan kode. Sepanjang Unit, siswa akan memiliki kesempatan untuk berpikir dan mendiskusikan konsep yang terkait dengan mekanisasi, otomatisasi, aliran proyek, dan pernyataan kondisional, dan untuk membuat hubungan antara proses manusia dan robotik.
Bangun dan Fitur di Unit Ini
Ada empat build di Unit ini:
- Lengan Robot manual
- Lengan Robot Bermotor
- Lengan Robot Kode yang bergerak pada 1 sumbu
- Lengan Robot Kode yang bergerak pada 2 sumbu
Bangunan ini dapat diselesaikan secara individual (dibangun dari awal untuk setiap Lab), atau sebagai bangunan transisi (bangunan pertama dimodifikasi di Lab berikutnya). Fitur utama setiap bangunan meliputi:
Lengan Robot: Lengan robot yang dioperasikan secara manual yang dikontrol dengan menggerakkan balok panjang berwarna putih untuk memutarnya dari sisi ke sisi, atau kenop oranye untuk menggerakkan lengan ke atas dan ke bawah. Bangunan ini menggunakan magnet Utara-Selatan untuk mengangkat cakram.
Lengan Robot Bermotor: Lengan robot yang menggunakan motor dan sakelar untuk bergerak. Motor dan sakelar dihubungkan ke baterai. Bangunan ini juga menggunakan magnet Utara-Selatan untuk mengangkat cakram.
- Catatan: Perakitan ini memerlukan 2 GO Kit untuk melengkapi 1 Lengan Robot.

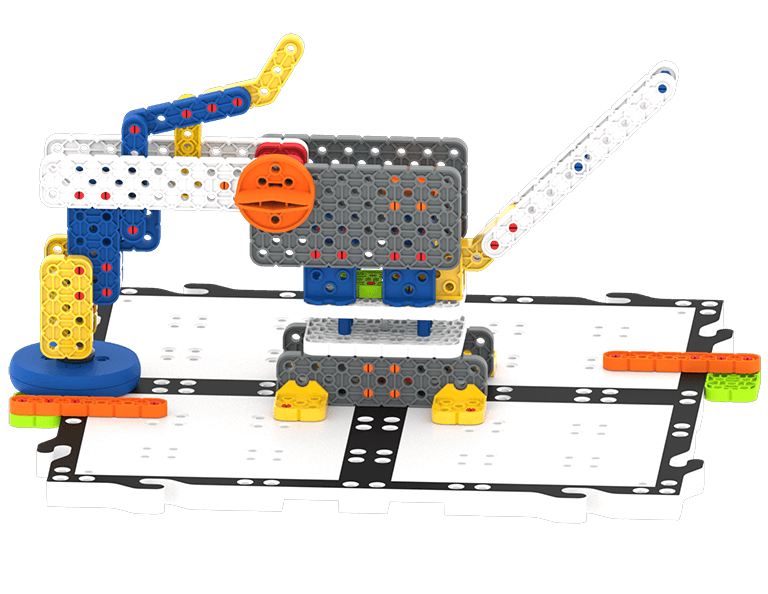
Kode Lengan Robot (1-Sumbu): Lengan robot dengan motor dan Otak yang dikontrol menggunakan VEXcode GO untuk bergerak pada 1 Sumbu - dari sisi ke sisi. Bangunan ini menambahkan Sensor Mata, dan menggunakan Elektromagnet untuk mengangkat cakram.

Kode Lengan Robot (2-Sumbu): Rancangan lengan robot terakhir yang menambahkan motor untuk mengangkat lengan pada sumbu kedua - ke atas dan ke bawah. Bangunan ini terus menggunakan Sensor Mata dan Elektromagnet untuk mengangkat cakram.

Lengan Robot dalam Kehidupan Nyata
Lengan robotik adalah jenis lengan mekanis, biasanya dapat diprogram, yang berfungsi mirip dengan lengan manusia.

Lengan robot, yang dapat bergerak ke beberapa arah berbeda, dapat diprogram untuk melaksanakan banyak tugas berbeda. Beberapa tugas ini termasuk pengelasan logam, pemesinan, pengecatan, perakitan sesuatu, penempatan sesuatu ke dalam mesin lain, dan pemilahan objek. Robot-robot ini sering melakukan pekerjaan-pekerjaan yang membosankan, kotor, dan berbahaya sehingga manusia tidak perlu mengerjakannya.

Lengan robotik dapat dilengkapi dengan jenis alat apa pun. Alat-alat ini digunakan dengan presisi, akurasi, kecepatan, dan pengulangan yang tidak dapat ditandingi oleh manusia. Dalam Unit Lab STEM ini, siswa akan melengkapi rancangan Lengan Robot mereka dengan magnet dan kemudian, elektromagnet.
Lengan robotik ini dapat menggunakan sensor, dan informasi dari sensor, untuk membuat keputusan tentang perilaku mereka. Pada Lab Unit selanjutnya, siswa akan mengeksplorasi cara kerja Sensor Mata dan cara penggunaannya untuk mengendalikan pergerakan Lengan Robot.
Robot industri dan otomatisasi merupakan bagian penting dari manufaktur sebagian besar produk yang diproduksi di dunia saat ini. Untuk kegiatan lanjutan, mintalah siswa meneliti robot industri dan membuat daftar produk yang mereka gunakan yang dibuat atau disortir oleh lengan robot.
Solusi Lab Dijelaskan
Di Lab 3-5, siswa akan menggunakan VEXcode GO untuk membuat proyek yang mengendalikan pergerakan Lengan Robot menggunakan Elektromagnet, Sensor Mata, Motor, dan Otak. Lab 3 memperkenalkan pemrograman dasar untuk memberi energi pada Elektromagnet dan memutar Lengan Robot. Lab 4 dan 5 mengeksplorasi cara mengendalikan Lengan Robot melalui pengambilan keputusan dalam kode, dan mengeksplorasi aliran proyek menggunakan Kondisi Boolean, Pernyataan Kondisional, dan blok [Selamanya] untuk memindahkan disk dan membuat keputusan berdasarkan penginderaan warna.
Lab 3 Mainkan Bagian 1 Solusi
Proyek ini akan membuat Lengan Robot:
- Putar Lengan Robot ke kanan (90 derajat).
- Lalu tunggu selama 2 detik.
- Kemudian, ulangi proses itu 3 kali lagi, untuk membalikkan Lengan Robot sepenuhnya dan mengembalikannya ke posisi awal.

Solusi Lab 3 Bagian 2
Proyek ini akan membuat Lengan Robot:
- Berikan energi pada Elektromagnet untuk mengambil cakram tersebut.
- Lalu, putar Lengan Robot ke kanan untuk menggerakkan cakram.
- Letakkan disk di lokasi baru.
- Kembalikan Lengan Robot ke posisi awal.

Catatan: Dalam skenario ini, cakram akan mengenai sinar oranye pada ubin, dan akan terpisah dari magnet. Inilah perilaku yang dimaksudkan.
Solusi Lab 4 Play Bagian 1
Proyek ini akan membuat Lengan Robot:
- Tunggu hingga Sensor Mata menemukan suatu objek.
- Kemudian, berikan energi pada Elektromagnet untuk mengambil cakram tersebut.
- Kemudian, putar Lengan Robot ke kanan untuk menggerakkan cakram
- Letakkan disk di lokasi baru.
- Kembalikan Lengan Robot ke posisi awal.

Catatan: Dalam skenario ini, cakram akan mengenai sinar oranye pada ubin, dan akan terpisah dari magnet. Inilah perilaku yang dimaksudkan.
Solusi Lab 4 Play Bagian 2
Proyek ini akan membuat Lengan Robot:
- Tunggu hingga sensor Mata menemukan suatu objek.
- Kemudian, berikan energi pada Elektromagnet untuk mengambil cakram tersebut.
- Lalu, gerakkan Lengan Robot KE ATAS untuk mengangkat cakram.
- Lalu, putar Lengan Robot ke kanan untuk menggerakkan cakram.
- Lalu, gerakkan Lengan Robot KE BAWAH sehingga dapat menjatuhkan cakram.
- Kembalikan Lengan Robot ke posisi awal.

Proyek ini menggunakan blok [Tunggu hingga] untuk mengendalikan aliran proyek ke Tunggu hingga Sensor Mata mendeteksi suatu objek sebelum memberi energi pada Elektromagnet. Jika tidak menunggu Sensor Mata, elektromagnet akan bergerak tanpa mengambil cakram. Hal ini memungkinkan robot untuk membuat keputusan berdasarkan data yang diterimanya dari Sensor Mata.
Solusi Lab 5 Play Bagian 1
Proyek ini akan membuat Lengan Robot:
- Tunggu hingga Sensor Mata menemukan suatu objek.
- Jika objeknya berwarna hijau maka ia akan menggerakkan cakram seperti yang dilakukan pada Lab 4.
- Lengan Robot akan terus memeriksa objek hijau karena adanya blok [Selamanya] di sekitar tumpukan.

Solusi Lab 5 Play Bagian 2
Proyek ini akan membuat Lengan Robot:
- Tunggu hingga Sensor Mata menemukan suatu objek.
- Jika objeknya berwarna hijau, Lengan Robot akan mengangkat cakram dan menggerakkannya ke kanan 90 derajat, lalu menjatuhkan cakram dan kembali ke posisi awal.
- Jika objeknya berwarna merah, Lengan Robot akan mengangkat cakram dan menggerakkannya ke kanan 180 derajat, lalu menjatuhkan cakram dan kembali ke posisi awal.
- Jika objeknya berwarna biru, Lengan Robot akan mengangkat cakram dan menggerakkannya ke kiri 90 derajat, lalu menjatuhkan cakram dan kembali ke posisi awal.

Proyek ini menambahkan pernyataan kondisional untuk memungkinkan robot membuat keputusan berulang berdasarkan data dari Sensor Mata. Mereka diulang karena blok [Selamanya] digunakan untuk memberi tahu robot agar terus memeriksa objek.
Untuk informasi lebih lanjut tentang blok individual yang digunakan dalam proyek ini, gunakan fitur Bantuan di VEXcode GO. Untuk informasi lebih lanjut tentang bentuk blok dan artinya, lihat artikel Bentuk Blok dan Artinya di Perpustakaan VEX. Jika Anda ingin mempelajari lebih lanjut tentang konsep Ilmu Komputer di balik solusi kode ini, Sertifikasi Pendidik Dasar Ilmu Komputer mungkin cocok untuk Anda.
Apa itu Project Flow?
Alur Proyek menggambarkan urutan eksekusi blok dalam suatu proyek. Semua proyek mengalir dari atas ke bawah, dimulai dari blok topi [Saat dimulai]. Hanya satu blok yang dieksekusi pada satu waktu, dan setelah satu blok menyelesaikan tindakan atau perilakunya, proyek berpindah ke blok berikutnya secara otomatis. Blok Kontrol tertentu (berwarna oranye) dapat mengubah alur proyek, berdasarkan kondisi atau nilai parameter. Dalam proyek ini, misalnya, blok [Tunggu sampai] akan menghentikan aliran proyek, dan “tunggu sampai” kondisinya (dalam hal ini, apakah sensor mata menemukan suatu objek), terpenuhi. Setelah kondisi tersebut terpenuhi (sensor mata menemukan suatu objek, sehingga blok melaporkan nilai BENAR), blok [Tunggu sampai] akan berakhir dan beralih ke blok berikutnya dalam proyek.

Potongan VEX GO
Untuk informasi lebih rinci tentang bagian-bagian VEX GO Kit dan perangkat elektronik yang digunakan dalam Unit Lengan Robot, lihat Artikel Bagian dalam VEX GO Kit VEX Library.