
พื้นหลัง
ในหน่วยนี้ นักเรียนจะสำรวจวิวัฒนาการของแขนหุ่นยนต์จากการใช้มือไปเป็นการใช้มอเตอร์และไปเป็นอัตโนมัติ รวมไปถึงวิธีควบคุมแขนหุ่นยนต์เพื่อทำภารกิจต่างๆ ด้วยมือ ด้วยสวิตช์ และการใช้โค้ด ตลอดทั้งหน่วยนี้ นักเรียนจะมีโอกาสคิดและพูดคุยเกี่ยวกับแนวคิดที่เกี่ยวข้องกับกลไก ระบบอัตโนมัติ การไหลของโครงการ และข้อความเงื่อนไข รวมถึงสร้างความเชื่อมโยงระหว่างกระบวนการของมนุษย์และหุ่นยนต์
การสร้างและคุณสมบัติในหน่วยนี้
มีสี่รุ่นในหน่วยนี้:
- แขนหุ่นยนต์แบบใช้มือ
- แขนหุ่นยนต์ขับเคลื่อนด้วยมอเตอร์
- แขนหุ่นยนต์โค้ดที่เคลื่อนที่บนแกน 1 แกน
- แขนหุ่นยนต์โค้ดที่เคลื่อนที่ด้วยแกน 2 แกน
คุณสามารถสร้างรุ่นเหล่านี้ให้เสร็จสมบูรณ์ได้ทีละรายการ (สร้างจากศูนย์สำหรับแต่ละ Lab) หรือเป็นรุ่นเปลี่ยนผ่าน (รุ่นแรกจะได้รับการปรับเปลี่ยนใน Lab ถัดไป) คุณสมบัติหลักของแต่ละรุ่นมีดังนี้:
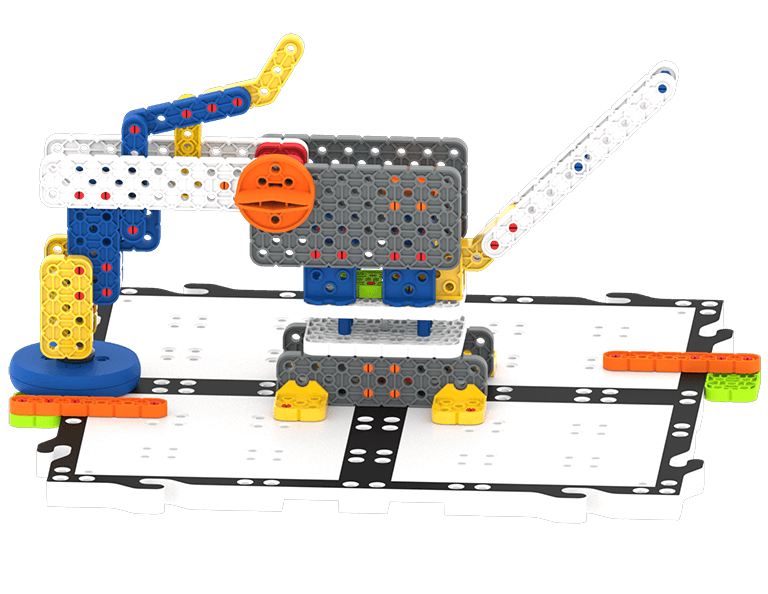
แขนหุ่นยนต์: แขนหุ่นยนต์ที่ควบคุมด้วยมือซึ่งควบคุมโดยการเลื่อนลำแสงสีขาวยาวเพื่อหมุนจากด้านหนึ่งไปอีกด้านหนึ่งหรือปุ่มสีส้มเพื่อเคลื่อนแขนขึ้นและลง งานนี้ใช้แม่เหล็กทิศเหนือ-ใต้เพื่อยกแผ่นดิสก์
แขนหุ่นยนต์แบบใช้มอเตอร์:แขนหุ่นยนต์ที่ใช้motors and สวิตช์ ที่จะย้าย มอเตอร์และสวิตช์เชื่อมต่อกับแบตเตอรี่ การสร้างนี้ยังใช้แม่เหล็กเหนือ-ใต้เพื่อยกดิสก์ด้วย
- หมายเหตุ: การประกอบนี้ต้องใช้ชุด GO จำนวน 2 ชุดจึงจะสร้างแขนหุ่นยนต์ได้ 1 ตัว
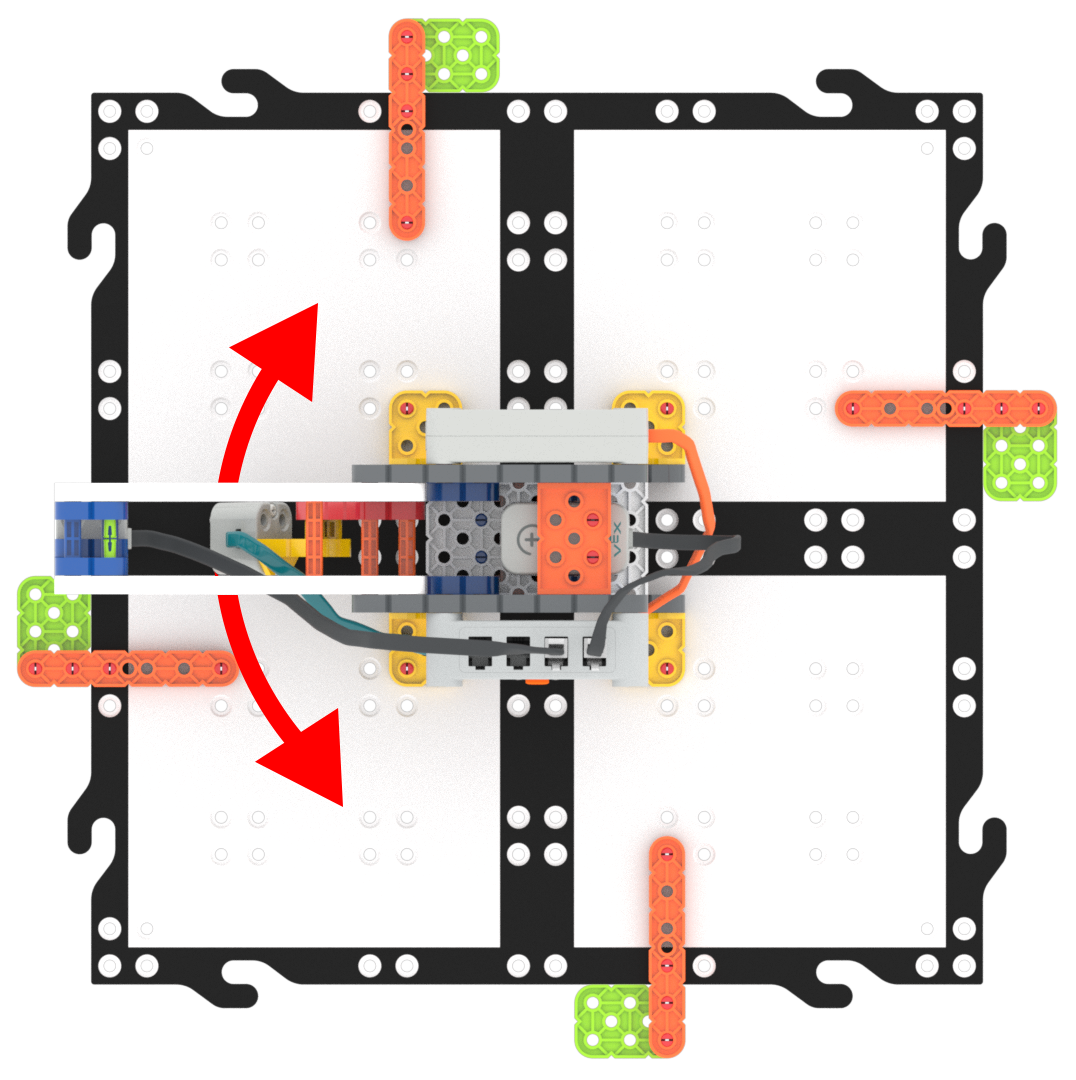
แขนหุ่นยนต์โค้ด (1 แกน): แขนหุ่นยนต์พร้อมมอเตอร์และก สมอง ที่ควบคุมโดยใช้ VEXcode GO เพื่อไปต่อที่ 1 แกน - จากด้านหนึ่งไปอีกด้านหนึ่ง โครงสร้างนี้เพิ่มไฟล์ เซ็นเซอร์ตา, และใช้ แม่เหล็กไฟฟ้า เพื่อยกดิสก์.
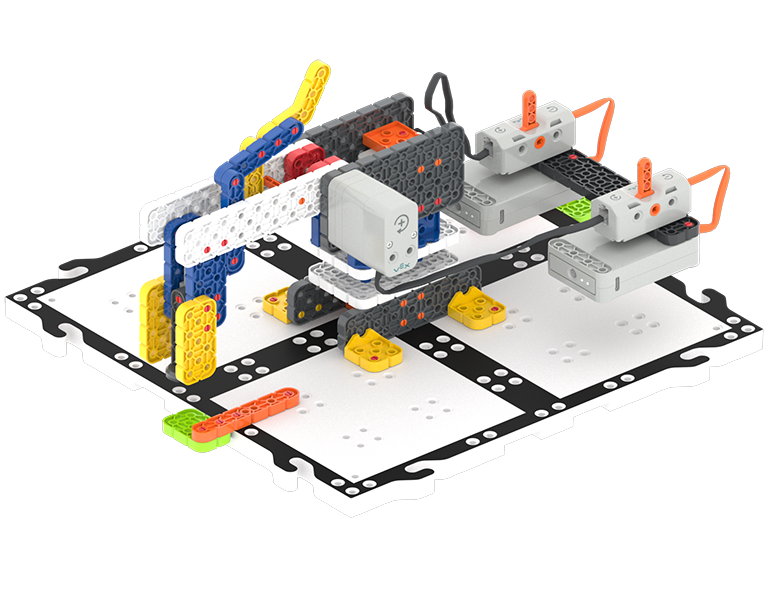
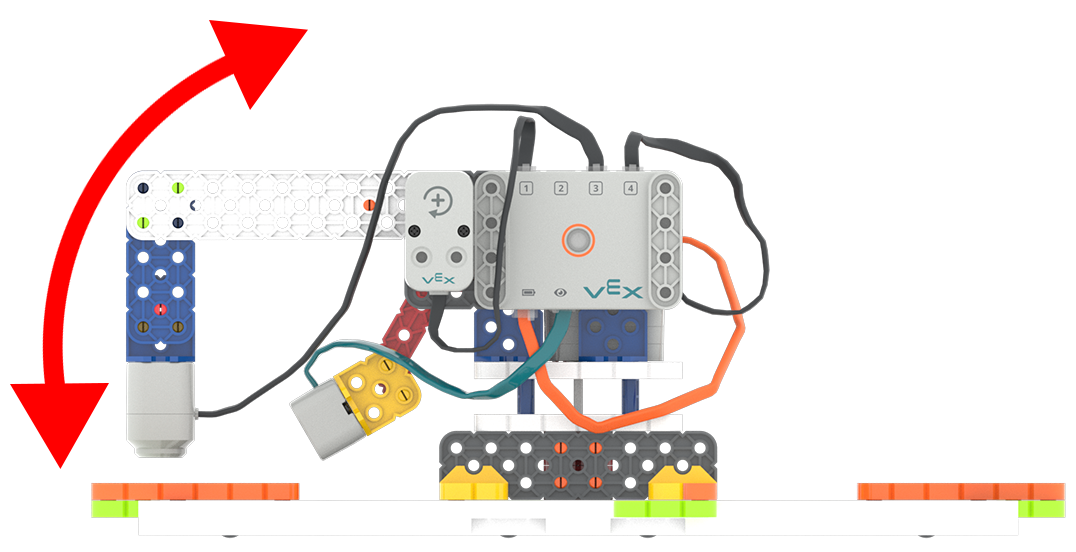
รหัสแขนหุ่นยนต์ (2 แกน) : โครงสร้างแขนหุ่นยนต์ขั้นสุดท้ายที่เพิ่มมอเตอร์เพื่อยกแขนบนแกนที่สอง ขึ้นและลง รุ่นนี้ยังคงใช้เซ็นเซอร์ตาและแม่เหล็กไฟฟ้าเพื่อยกดิสก์
แขนหุ่นยนต์ในชีวิตจริง
แขนหุ่นยนต์เป็นแขนกลชนิดหนึ่ง ซึ่งมักสามารถตั้งโปรแกรมได้ และทำหน้าที่คล้ายแขนของมนุษย์

แขนหุ่นยนต์ซึ่งสามารถเคลื่อนที่ได้หลายทิศทาง สามารถตั้งโปรแกรมให้ทำงานต่างๆ มากมายได้ งานบางส่วนได้แก่ การเชื่อมโลหะ การกลึง การทาสี การประกอบสิ่งของ การวางสิ่งของลงในเครื่องจักรอื่น และการคัดแยกวัตถุ หุ่นยนต์เหล่านี้มักจะทำหน้าที่ที่น่าเบื่อ สกปรก และอันตราย ดังนั้นจึงทำให้ผู้คนไม่จำเป็นต้องทำ

แขนหุ่นยนต์สามารถติดตั้งเครื่องมือได้ทุกประเภท เครื่องมือเหล่านี้มีการใช้ด้วยความแม่นยำ ความถูกต้อง ความเร็ว และความซ้ำซากที่มนุษย์ไม่สามารถเทียบได้ ในหน่วยปฏิบัติการ STEM นี้ นักเรียนจะติดตั้งแม่เหล็กเข้ากับแขนหุ่นยนต์ของตน และต่อมาคือแม่เหล็กไฟฟ้า
แขนหุ่นยนต์เหล่านี้สามารถใช้เซ็นเซอร์และข้อมูลจากเซ็นเซอร์เพื่อตัดสินใจเกี่ยวกับพฤติกรรมของพวกมัน ในห้องปฏิบัติการในภายหลังของหน่วยนี้ นักเรียนจะสำรวจวิธีการทำงานของเซ็นเซอร์ดวงตา และสามารถใช้เพื่อควบคุมการเคลื่อนไหวของแขนหุ่นยนต์ได้อย่างไร
หุ่นยนต์อุตสาหกรรมและระบบอัตโนมัติเป็นส่วนสำคัญในการผลิตผลิตภัณฑ์ส่วนใหญ่ในโลกปัจจุบัน สำหรับกิจกรรมขยายความ ให้ให้นักเรียนค้นคว้าเกี่ยวกับหุ่นยนต์อุตสาหกรรมและทำรายการผลิตภัณฑ์ที่พวกเขาใช้ซึ่งผลิตโดยหรือจัดเรียงโดยแขนหุ่นยนต์
คำอธิบายโซลูชันแล็ป
ในห้องปฏิบัติการ 3-5 นักเรียนจะใช้ VEXcode GO เพื่อสร้างโปรเจ็กต์ที่ควบคุมการเคลื่อนไหวของแขนหุ่นยนต์โดยใช้แม่เหล็กไฟฟ้า เซ็นเซอร์ตา มอเตอร์ และสมอง ห้องปฏิบัติการ 3 แนะนำการเขียนโปรแกรมพื้นฐานในการจ่ายพลังงานให้กับแม่เหล็กไฟฟ้าและหมุนแขนหุ่นยนต์ ห้องปฏิบัติการ 4 และ 5 ศึกษาวิธีการควบคุมแขนหุ่นยนต์ผ่านการตัดสินใจในโค้ด และสำรวจกระแสงานของโครงการโดยใช้เงื่อนไขแบบบูลีน คำสั่งเงื่อนไข และบล็อก [Forever] เพื่อย้ายดิสก์และตัดสินใจโดยอิงจากการตรวจจับสี
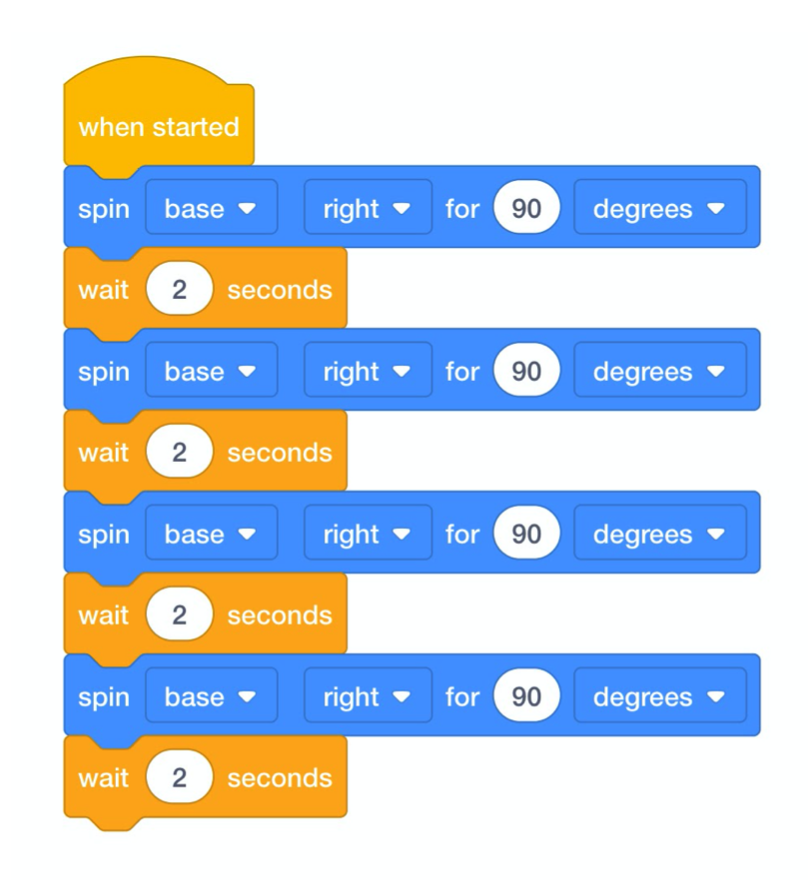
แล็บ 3 เล่นส่วนที่ 1 โซลูชัน
โครงการนี้จะทำให้แขนหุ่นยนต์:
- หมุนแขนหุ่นยนต์ไปทางขวา (90 องศา)
- จากนั้นรอประมาณ 2 วินาที
- จากนั้นทำซ้ำขั้นตอนนั้นอีก 3 ครั้ง เพื่อหมุนแขนหุ่นยนต์กลับด้านอย่างสมบูรณ์และกลับสู่ตำแหน่งเริ่มต้น
แล็บ 3 เล่นส่วนที่ 2 โซลูชัน
โครงการนี้จะทำให้แขนหุ่นยนต์:
- กระตุ้นแม่เหล็กไฟฟ้าเพื่อหยิบแผ่นดิสก์
- จากนั้นหมุนแขนหุ่นยนต์ไปทางขวาเพื่อเคลื่อนย้ายแผ่นดิสก์
- วางดิสก์ในตำแหน่งใหม่
- คืนแขนหุ่นยนต์กลับสู่ตำแหน่งเริ่มต้น
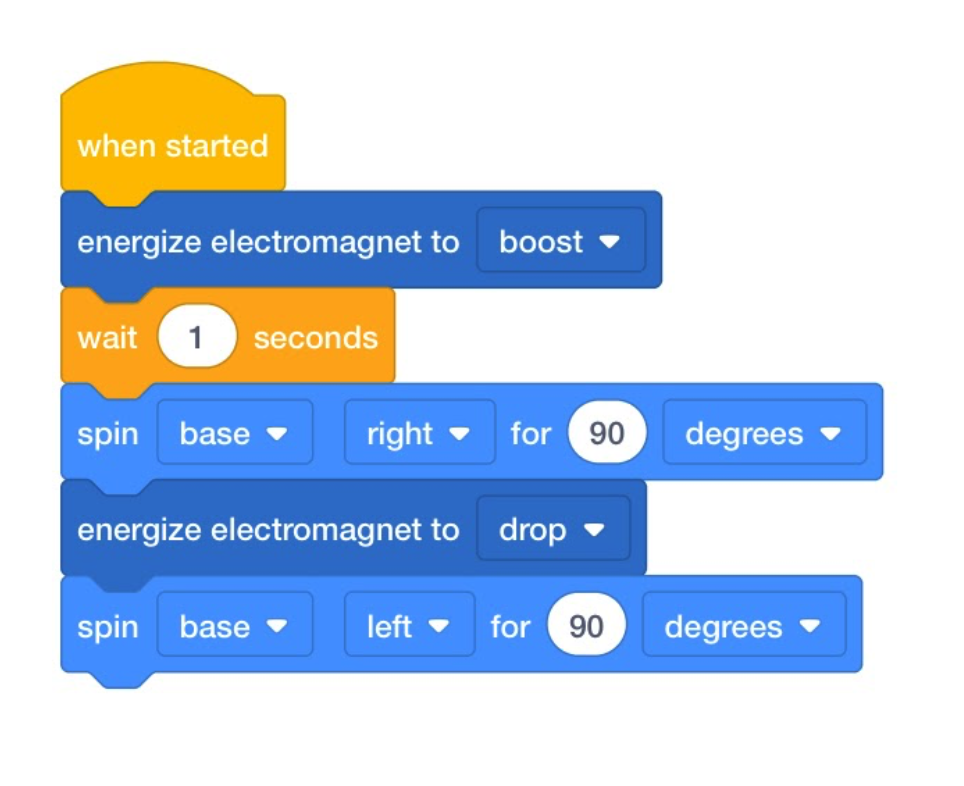
หมายเหตุ: ในสถานการณ์นี้ ดิสก์จะกระทบลำแสงสีส้มบนกระเบื้อง และควรแยกออกจากแม่เหล็ก นี่คือพฤติกรรมที่ตั้งใจไว้
แล็บ 4 เล่นส่วนที่ 1 โซลูชัน
โครงการนี้จะทำให้แขนหุ่นยนต์:
- รอจนกระทั่งเซนเซอร์ตาพบวัตถุ
- จากนั้นจ่ายพลังงานให้กับแม่เหล็กไฟฟ้าเพื่อหยิบแผ่นดิสก์
- จากนั้นหมุนแขนหุ่นยนต์ไปทางขวาเพื่อเคลื่อนย้ายหุ่นยนต์
- วางดิสก์ในตำแหน่งใหม่
- คืนแขนหุ่นยนต์กลับสู่ตำแหน่งเริ่มต้น
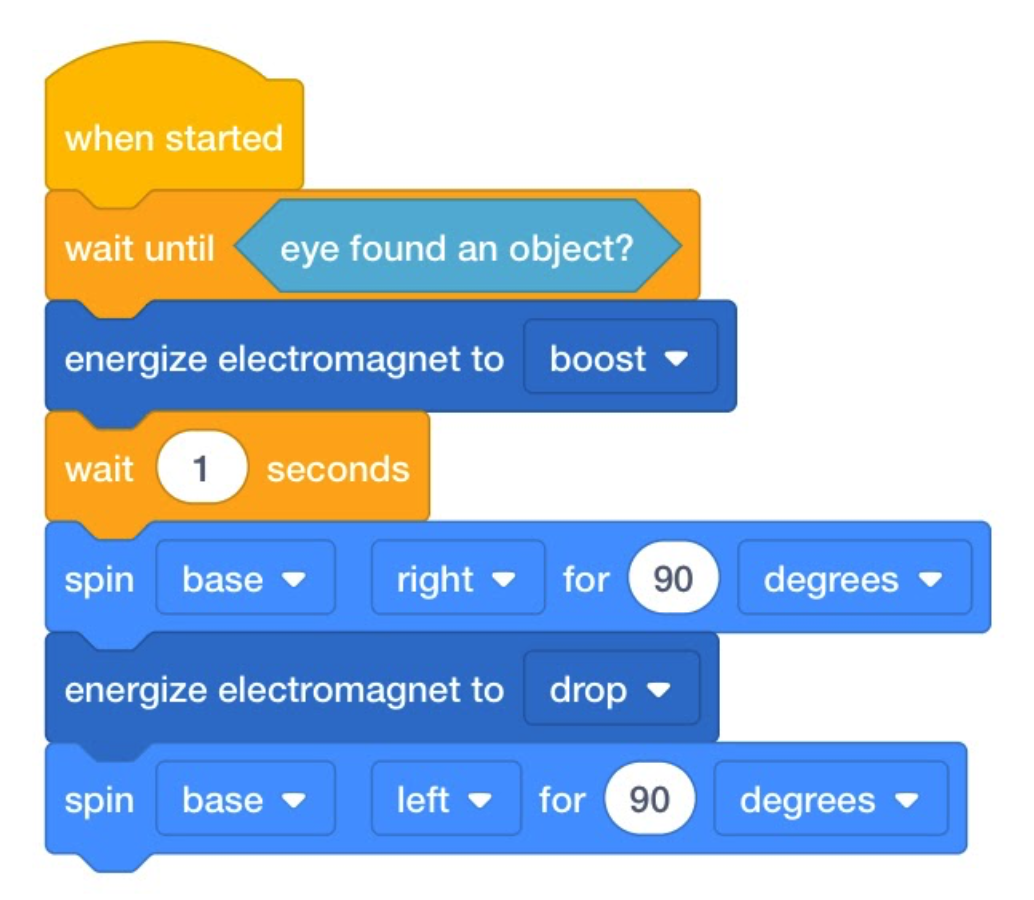
หมายเหตุ: ในสถานการณ์นี้ ดิสก์จะกระทบลำแสงสีส้มบนกระเบื้อง และควรแยกออกจากแม่เหล็ก นี่คือพฤติกรรมที่ตั้งใจไว้
แล็บ 4 เล่นส่วนที่ 2 โซลูชัน
โครงการนี้จะทำให้แขนหุ่นยนต์:
- รอจนกว่าเซนเซอร์ตาจะพบวัตถุ
- จากนั้นจ่ายพลังงานให้กับแม่เหล็กไฟฟ้าเพื่อหยิบแผ่นดิสก์
- จากนั้นขยับแขนหุ่นยนต์ขึ้นเพื่อยกดิสก์
- จากนั้นหมุนแขนหุ่นยนต์ไปทางขวาเพื่อเคลื่อนย้ายแผ่นดิสก์
- จากนั้นขยับแขนหุ่นยนต์ลงเพื่อให้สามารถวางดิสก์ได้
- กลับแขนหุ่นยนต์สู่ตำแหน่งเริ่มต้น
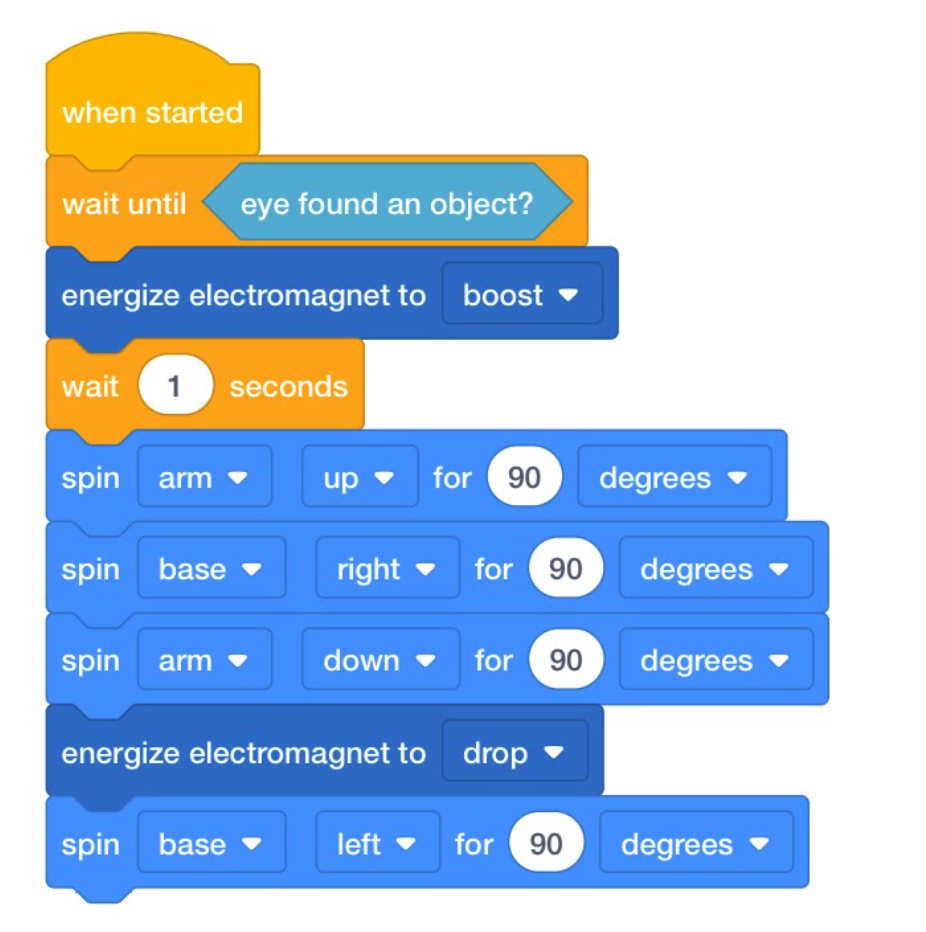
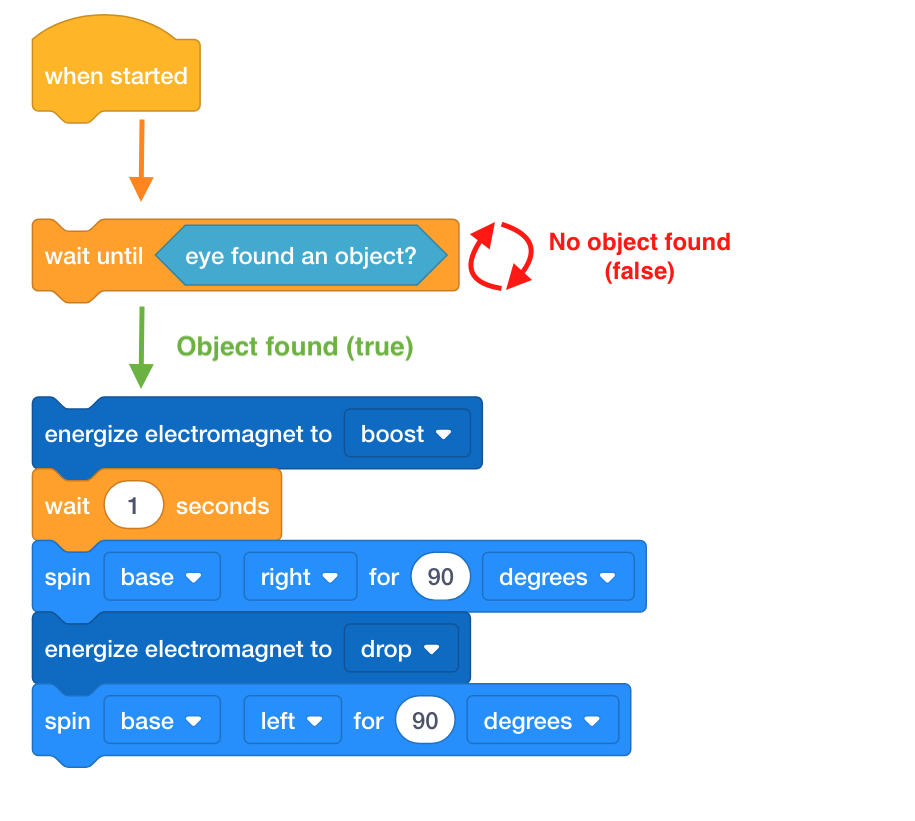
โครงการเหล่านี้ใช้บล็อก [รอจนกว่า] เพื่อควบคุมการไหลของโครงการเพื่อรอจนกว่าเซนเซอร์ตาจะตรวจพบวัตถุก่อนที่จะจ่ายพลังงานให้กับแม่เหล็กไฟฟ้า หากไม่รอเซนเซอร์ตา แม่เหล็กไฟฟ้าจะเคลื่อนที่โดยไม่หยิบแผ่นดิสก์ ซึ่งจะทำให้หุ่นยนต์สามารถตัดสินใจได้โดยอิงตามข้อมูลที่ได้รับจากเซ็นเซอร์ตา
แล็บ 5 เล่นส่วนที่ 1 โซลูชัน
โครงการนี้จะทำให้แขนหุ่นยนต์:
- รอจนกระทั่งเซนเซอร์ตาพบวัตถุ
- หากวัตถุเป็นสีเขียว วัตถุจะเคลื่อนย้ายดิสก์ เช่นเดียวกับที่ทำในแล็บ 4
- แขนหุ่นยนต์จะตรวจสอบวัตถุสีเขียวอย่างต่อเนื่องเนื่องจากมีบล็อก [ตลอดไป] อยู่รอบ ๆ สแต็ก
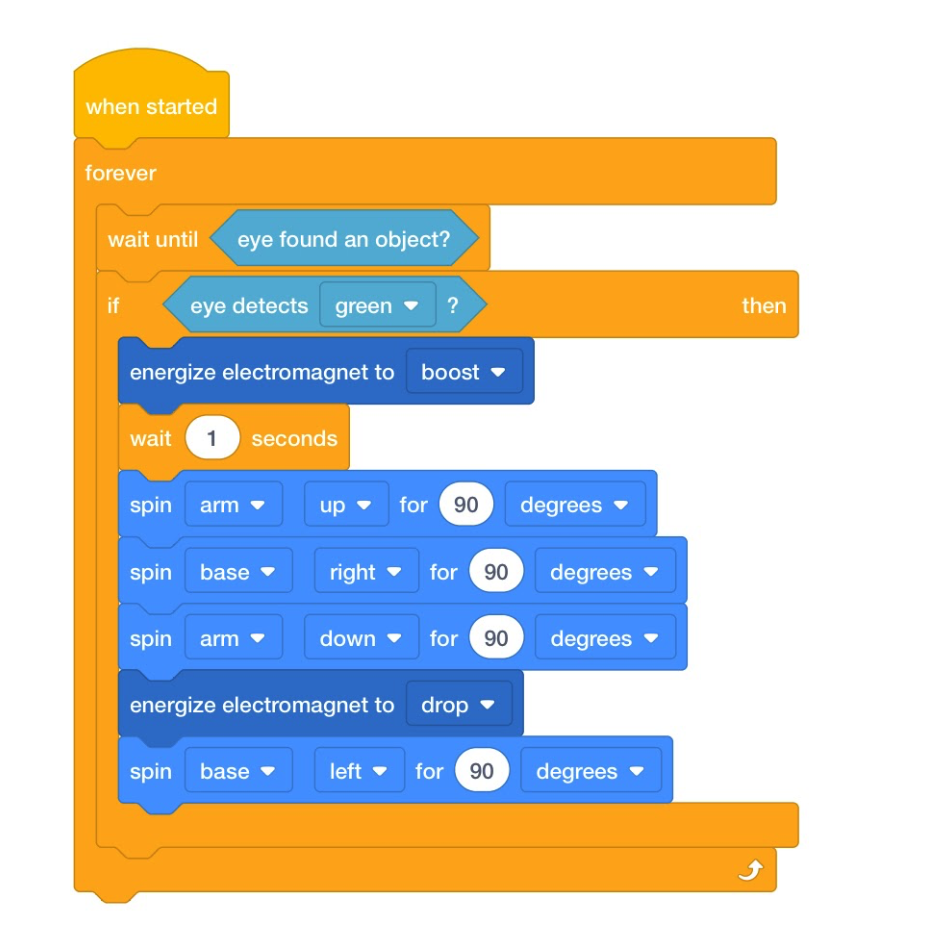
แล็บ 5 เล่นส่วนที่ 2 โซลูชัน
โครงการนี้จะทำให้แขนหุ่นยนต์:
- รอจนกระทั่งเซนเซอร์ตาพบวัตถุ
- หากวัตถุเป็นสีเขียว แขนหุ่นยนต์จะยกดิสก์ขึ้นและย้ายไปทางขวา 90 องศา จากนั้นปล่อยดิสก์ลงและกลับสู่ตำแหน่งเริ่มต้น
- หากวัตถุเป็นสีแดง แขนหุ่นยนต์จะยกดิสก์ขึ้นและย้ายไปทางขวา 180 องศา จากนั้นปล่อยดิสก์ลงและกลับสู่ตำแหน่งเริ่มต้น
- หากวัตถุเป็นสีน้ำเงิน แขนหุ่นยนต์จะยกดิสก์ขึ้นและเลื่อนไปทางซ้าย 90 องศา จากนั้นปล่อยดิสก์ลงและกลับสู่ตำแหน่งเริ่มต้น
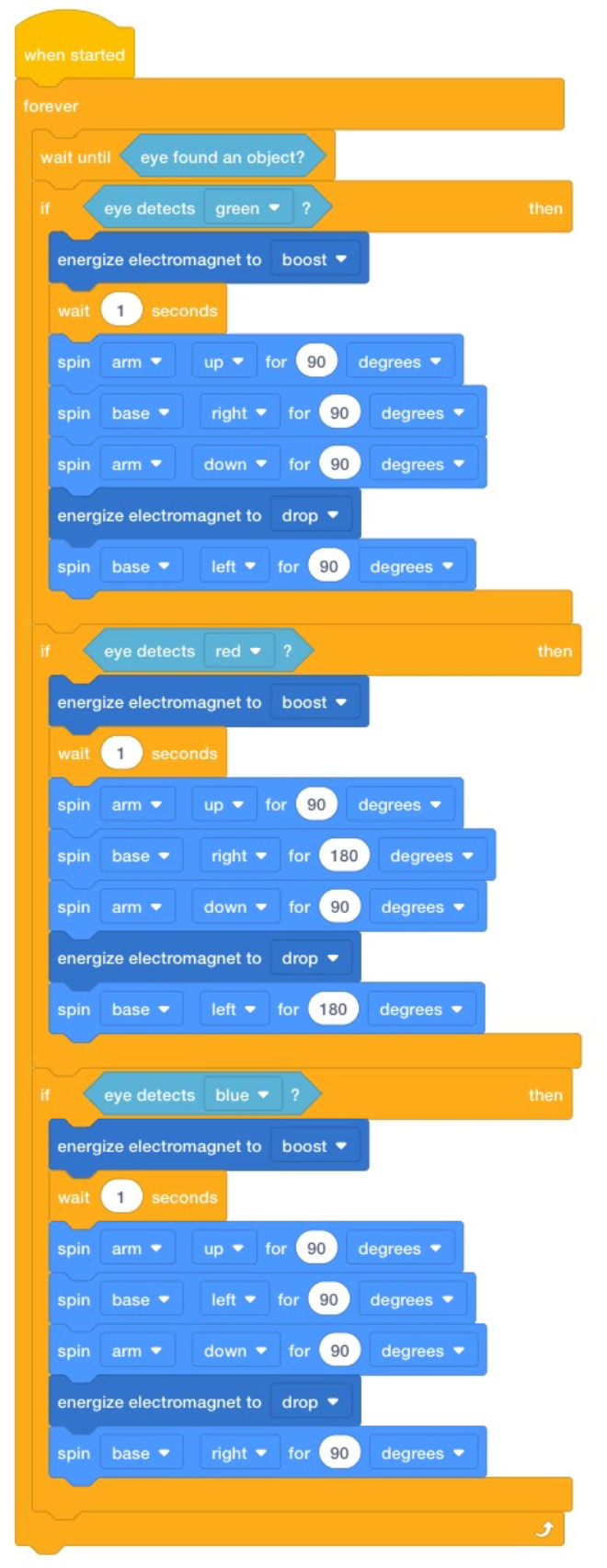
โครงการเหล่านี้เพิ่มคำสั่งแบบมีเงื่อนไขเพื่อให้หุ่นยนต์สามารถตัดสินใจซ้ำๆ ได้ตามข้อมูลจากเซ็นเซอร์ตา การกระทำดังกล่าวเกิดขึ้นซ้ำๆ เพราะมีการใช้บล็อก [ตลอดไป] เพื่อสั่งให้หุ่นยนต์ตรวจสอบวัตถุอย่างต่อเนื่อง
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับแต่ละบล็อกที่ใช้ในโปรเจ็กต์เหล่านี้ ให้ใช้ ช่วย คุณสมบัติ ใน VEXcode GO สำหรับข้อมูลเพิ่มเติมเกี่ยวกับรูปร่างของบล็อกและความหมาย โปรดดูที่ ปิดกั้น รูปร่างและความหมาย บทความในห้องสมุด VEX. หากคุณต้องการเรียนรู้เพิ่มเติมเกี่ยวกับ แนวคิดวิทยาการคอมพิวเตอร์ที่อยู่เบื้องหลังโซลูชันโค้ดเหล่านี้ พื้นฐานวิทยาการคอมพิวเตอร์ หลักสูตรการรับรองนักการศึกษา อาจจะเหมาะกับคุณ.
Project Flow คืออะไร?
ลำดับของโปรเจ็กต์จะอธิบายลำดับที่บล็อกถูกดำเนินการในโครงการ โครงการทั้งหมดไหลจากบนลงล่าง โดยเริ่มจากบล็อกหมวก [เมื่อเริ่มต้น] มีการดำเนินการเพียงบล็อกเดียวในแต่ละครั้ง และเมื่อบล็อกเสร็จสิ้นการดำเนินการหรือพฤติกรรมแล้ว โปรเจ็กต์จะย้ายไปยังบล็อกถัดไปโดยอัตโนมัติ บล็อกควบคุมบางบล็อก (สีส้ม) สามารถปรับเปลี่ยนกระแสของโครงการตามเงื่อนไขหรือค่าพารามิเตอร์ ในโปรเจ็กต์นี้ ตัวอย่างเช่น บล็อก [รอจนกว่า] จะหยุดการไหลของโปรเจ็กต์และ "รอจนกว่า" เงื่อนไข (ในกรณีนี้ คือ เซ็นเซอร์ตาพบวัตถุหรือไม่) จะเกิดขึ้น เมื่อตรงตามเงื่อนไขนั้น (เซ็นเซอร์ตาพบวัตถุ ดังนั้นบล็อกจึงรายงานค่าเป็น TRUE) บล็อก [รอจนกว่า] จะสิ้นสุดและย้ายไปยังบล็อกถัดไปในโปรเจ็กต์
ชิ้นส่วน VEX GO
สำหรับข้อมูลโดยละเอียดเพิ่มเติมเกี่ยวกับชิ้นส่วน VEX GO Kit และอุปกรณ์อิเล็กทรอนิกส์ที่ใช้ใน Robot Arm Unit โปรดดูที่ ที่ ชิ้นส่วน ใน ชุด VEX GO บทความห้องสมุด VEX