
Fundo
Nesta unidade, os alunos irão explorar a evolução de um braço robótico de manual para motorizado e automatizado, e como pode ser controlado para realizar uma tarefa manualmente, com interruptores e utilizando código. Ao longo da Unidade os alunos terão a oportunidade de pensar e discutir conceitos relacionados com a mecanização, a automatização, o fluxo de projetos e as declarações condicionais, e de fazer ligações entre os processos humanos e robóticos.
Construções e características nesta unidade
Existem quatro construções nesta unidade:
- Um braço robótico manual
- Um braço robótico motorizado
- Um braço robótico de código que se move em 1 eixo
- Um braço robótico de código que se move em 2 eixos
Estas compilações podem ser concluídas individualmente (construídas de raiz para cada laboratório) ou como uma compilação de transição (a primeira compilação é modificada nos laboratórios subsequentes). As principais características de cada construção incluem:
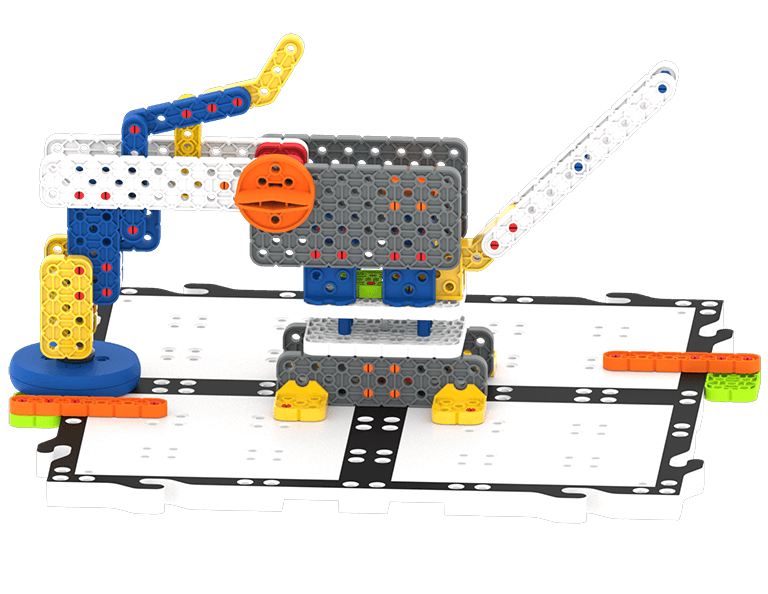
Braço robótico: Um braço robótico operado manualmente que é controlado movendo o feixe longo branco para o rodar de um lado para o outro ou os botões laranja para mover o braço para cima e para baixo. Esta construção utiliza um íman Norte-Sul para levantar os discos.
Braço robótico motorizado: Um braço robótico que utiliza motores e interruptores mover. Os motores e os interruptores estão ligados a uma bateria. Esta construção também utiliza um íman Norte-Sul para levantar os discos.
- Nota: Esta construção requer 2 kits GO para completar 1 braço robótico.
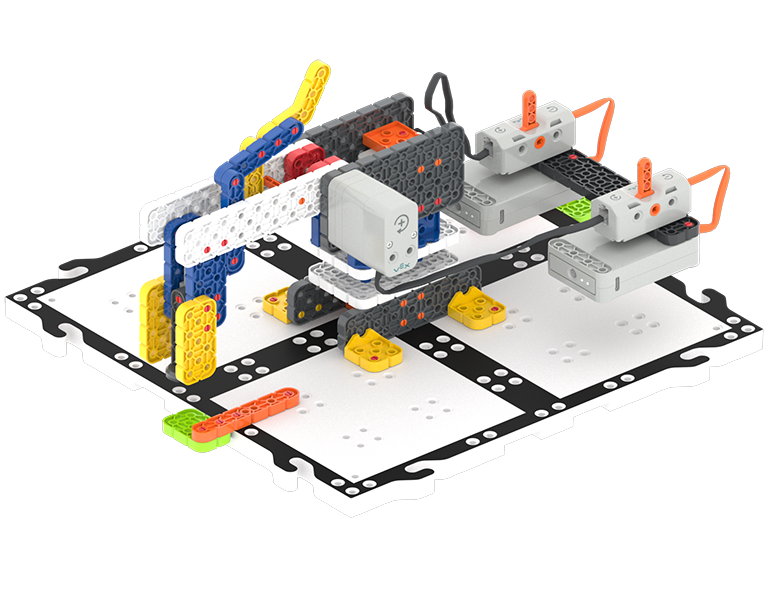
Braço Robô de Código (1 Eixo): Um braço robótico com motores e um Cérebro que é controlado usando o VEXcode GO para avançar 1 Eixo - lado a lado. Esta compilação adiciona um Sensor ocular, e usa um Eletroímã levantar os discos.
Braço robótico de código (2 eixos): A construção final do braço robótico que acrescenta um motor para elevar o braço num segundo eixo - para cima e para baixo. Esta construção continua a utilizar o Sensor ocular e o Eletroíman para elevar os discos.
Braços robóticos na vida real
Um braço robótico é um tipo de braço mecânico, geralmente programável, que funciona de forma semelhante a um braço humano.

Os braços robóticos, que se podem mover em diversas direções diferentes, podem ser programados para realizar muitas tarefas diferentes. Algumas destas tarefas incluem soldadura de metal, maquinação, pintura, montagem de coisas, colocação de coisas noutras máquinas e classificação de objetos. Estes robôs geralmente realizam trabalhos aborrecidos, sujos e perigosos, para que as pessoas não tenham de os realizar.

Os braços robóticos podem ser equipados com qualquer tipo de ferramenta. Estas ferramentas são utilizadas com precisão, exatidão, velocidade e repetitividade que não podem ser igualadas pelos humanos. Nesta unidade de laboratório STEM, os alunos equiparão o seu braço robótico com um íman e, posteriormente, um eletroíman.
Estes braços robóticos podem utilizar sensores e informações de sensores para tomar decisões sobre os seus comportamentos. Nos últimos Laboratórios da Unidade, os alunos irão explorar o funcionamento do Sensor de Olho e como pode ser utilizado para controlar o movimento do Braço do Robot.
Os robôs industriais e a automação são uma parte importante do fabrico da maioria dos produtos produzidos no mundo atual. Para uma atividade de extensão, peça aos alunos que pesquisem sobre robôs industriais e que façam uma lista dos produtos que utilizam e que foram fabricados ou classificados por um braço robótico.
Soluções de laboratório explicadas
Nos laboratórios 3 a 5, os alunos utilizarão o VEXcode GO para criar projetos que controlam o movimento do braço do robô utilizando o eletroíman, o sensor ocular, os motores e o cérebro. O Laboratório 3 apresenta a programação básica para energizar o eletroíman e rodar o braço do robô. Os laboratórios 4 e 5 exploram como controlar o braço robótico através da tomada de decisões em código e exploram o fluxo do projeto utilizando condições booleanas, instruções condicionais e o bloco [Forever] para mover discos e tomar decisões com base na deteção de cor.
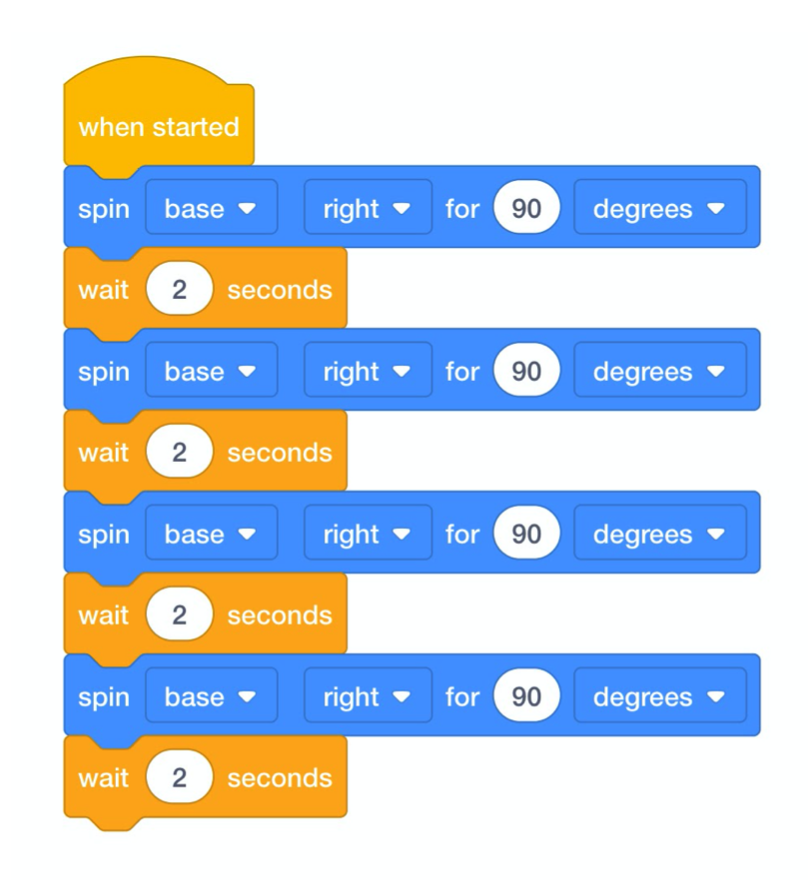
Laboratório 3: Solução da Parte 1
Este projeto fará com que o Braço Robô:
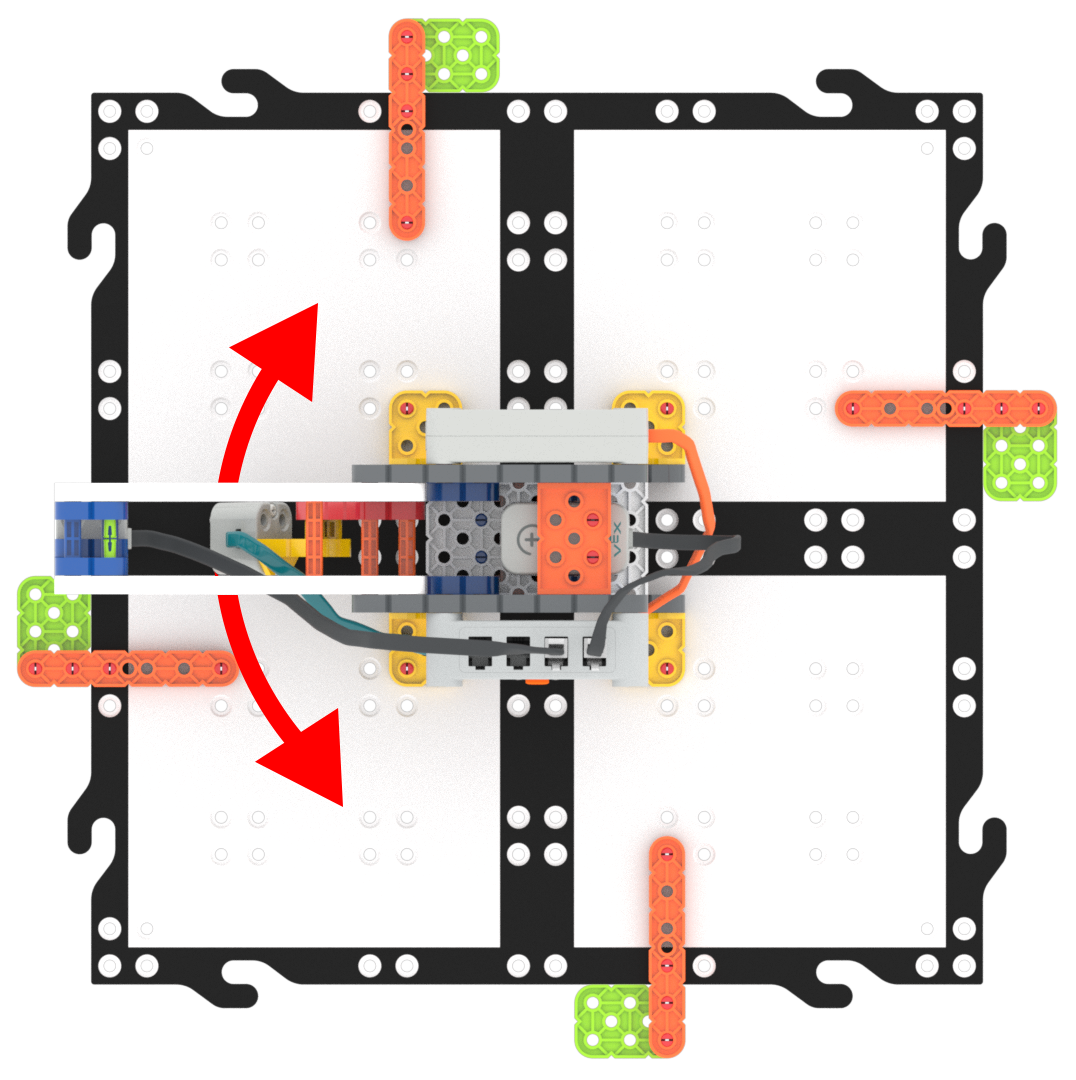
- Rode o braço do robô para a direita (90 graus).
- Assim, aguarde 2 segundos.
- De seguida, repita este processo mais 3 vezes, para rodar completamente o braço do robô e voltar à posição inicial.
Laboratório 3: Solução da Parte 2
Este projeto fará com que o Braço Robô:
- Energize o eletroíman para apanhar o disco.
- Em seguida, rode o braço do robô para a direita para mover o disco.
- Solte o disco num novo local.
- Volte a colocar o braço do robô na sua posição inicial.
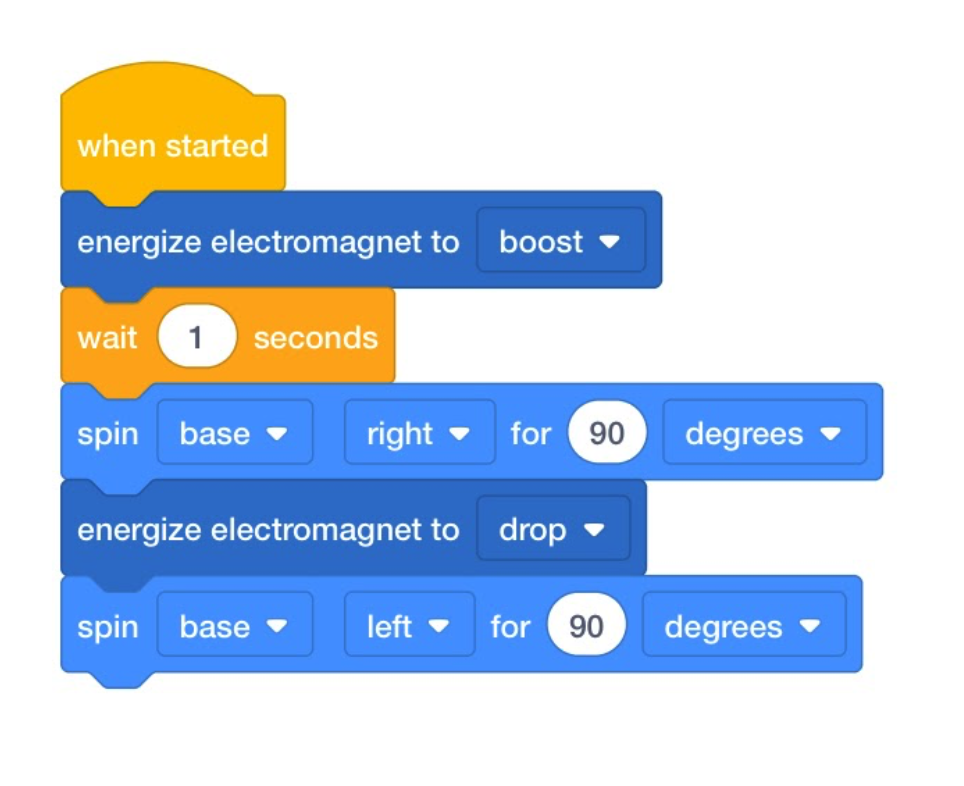
Nota: Neste cenário, o disco irá atingir o feixe laranja no azulejo e deverá separar-se do íman. Este é o comportamento pretendido.
Solução do laboratório 4, parte 1
Este projeto fará com que o Braço Robô:
- Aguarde até que o sensor ocular encontre um objeto.
- De seguida, energiza o Eletroíman para apanhar o disco.
- De seguida, rode o braço do robô para a direita para mover o dis
- Solte o disco num novo local.
- Volte a colocar o braço do robô na sua posição inicial.
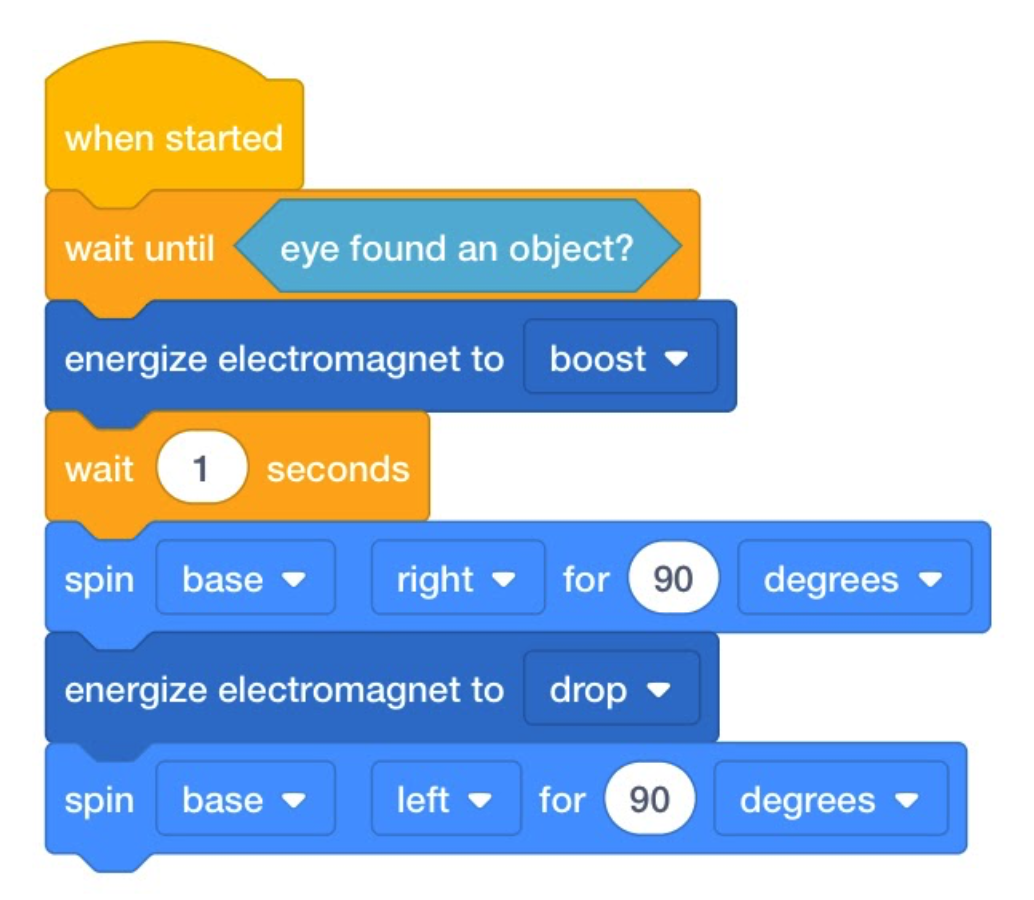
Nota: Neste cenário, o disco irá atingir o feixe laranja no azulejo e deverá separar-se do íman. Este é o comportamento pretendido.
Solução do laboratório 4, parte 2
Este projeto fará com que o Braço Robô:
- Aguarde até que o sensor ocular encontre um objeto.
- De seguida, energiza o Eletroíman para apanhar o disco.
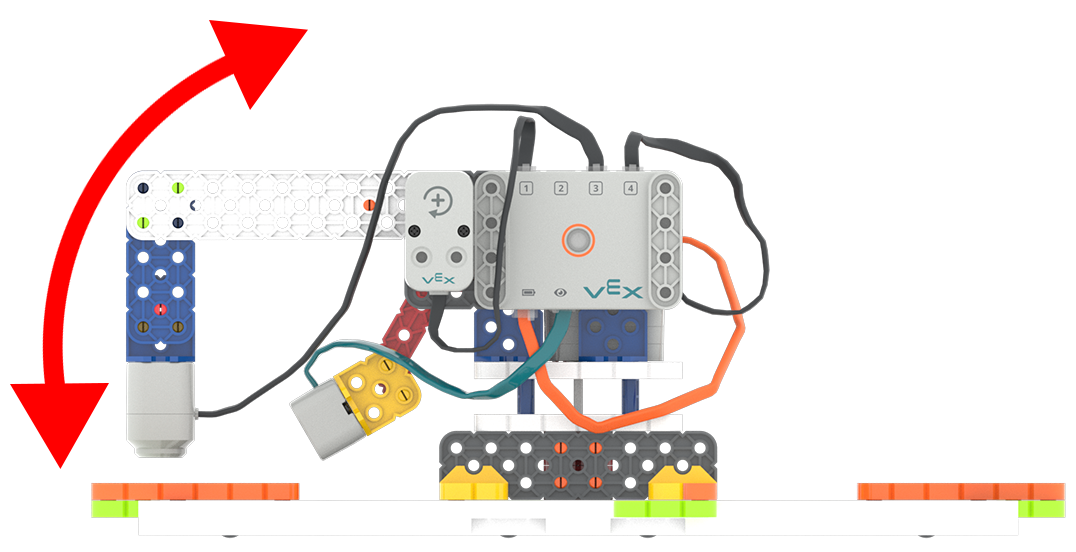
- De seguida, mova o braço do robô para cima para levantar o disco.
- Em seguida, rode o braço do robô para a direita para mover o disco.
- Em seguida, mova o braço do robô PARA BAIXO, de modo a que este possa largar o disco.
- Volte a colocar o braço do robô na sua posição inicial.
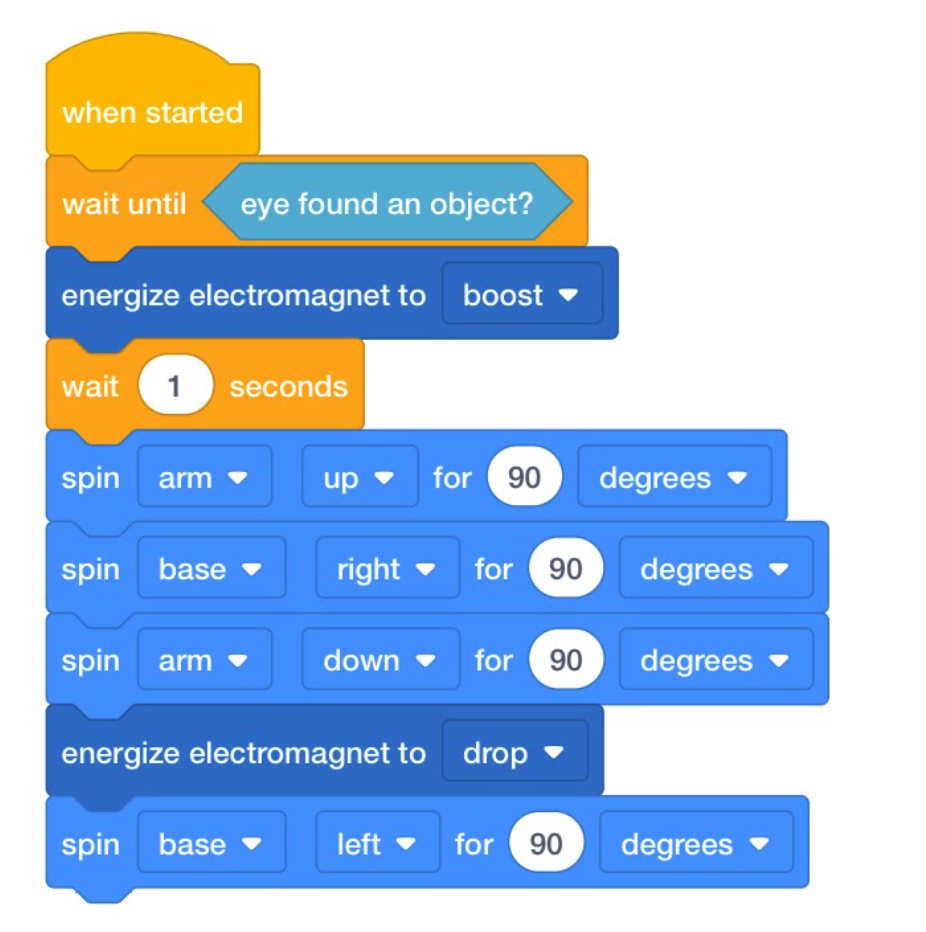
Estes projetos utilizam o bloco [Aguardar até] para controlar o fluxo do projeto para Aguardar até que o Sensor ocular detete um objeto antes de energizar o Eletroíman. Se não esperasse pelo sensor ocular, o eletroíman movia-se sem apanhar o disco. Isto permite que o robô tome uma decisão com base nos dados que recebe do seu sensor ocular.
Solução do laboratório 5, parte 1
Este projeto fará com que o Braço Robô:
- Aguarde até que o sensor ocular encontre um objeto.
- Se o objeto estiver verde, moverá o disco como fez no Laboratório 4.
- O braço robótico verificará continuamente se existe um objeto verde por causa do bloco [Para sempre] em redor da pilha.
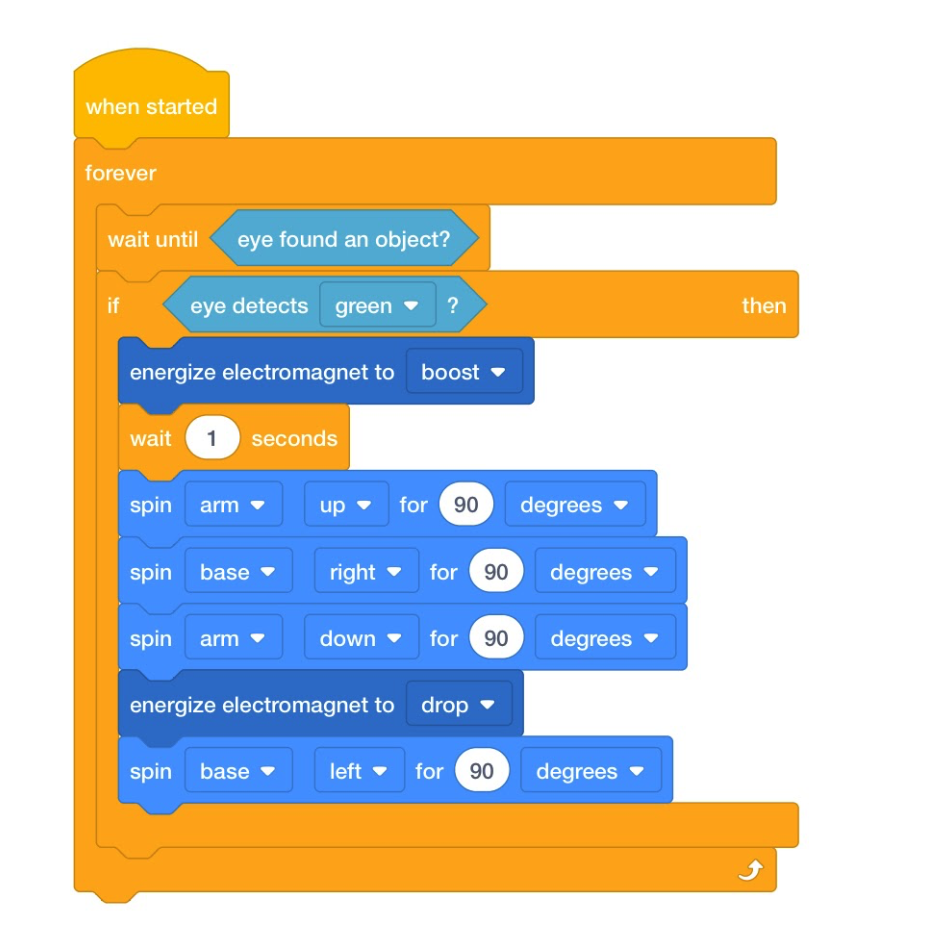
Solução do laboratório 5, parte 2
Este projeto fará com que o Braço Robô:
- Aguarde até que o sensor ocular encontre um objeto.
- Se o objeto estiver verde, o braço do robô levantará o disco e movê-lo-á 90 graus para a direita, depois largará o disco e regressará à sua posição inicial.
- Se o objeto estiver vermelho, o braço do robô levantará o disco e movê-lo-á 180 graus para a direita, depois largará o disco e voltará à sua posição inicial.
- Se o objeto for azul, o braço do robô levantará o disco e movê-lo-á 90 graus para a esquerda, depois largará o disco e voltará à sua posição inicial.
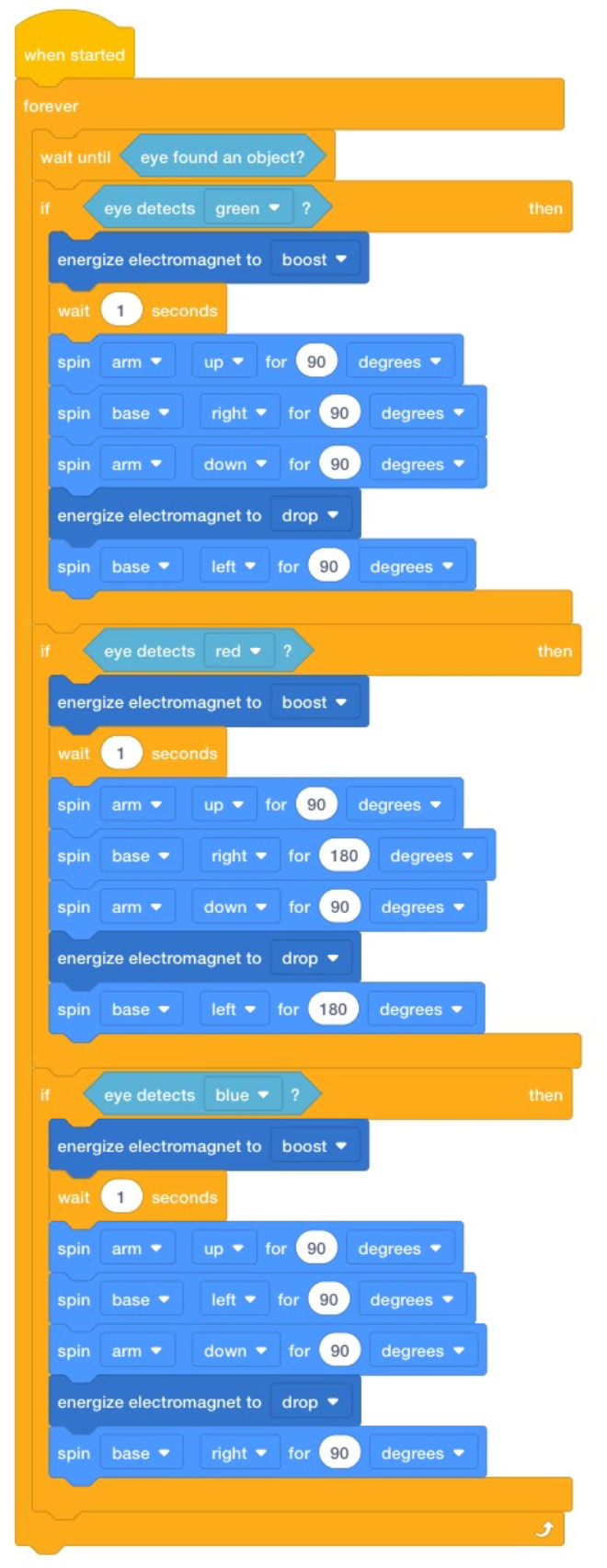
Estes projetos adicionam declarações condicionais para permitir que o robô tome decisões repetidas com base nos dados do Eye Sensor. São repetidos porque o bloco [Forever] é utilizado para dizer ao robô para verificar continuamente os objetos.
Para mais informações sobre os blocos individuais utilizados nestes projetos, utilize o Ajuda característica no VEXcode GO. Para mais informações sobre os formatos dos blocos e os seus significados, consulte o Bloco Formas e significados artigo na Biblioteca VEX. Se quiser saber mais sobre o Conceitos de Ciência da Computação por detrás destas soluções de código, o Fundamentos da Ciência da Computação Curso de Certificação de Educadores pode ser para si.
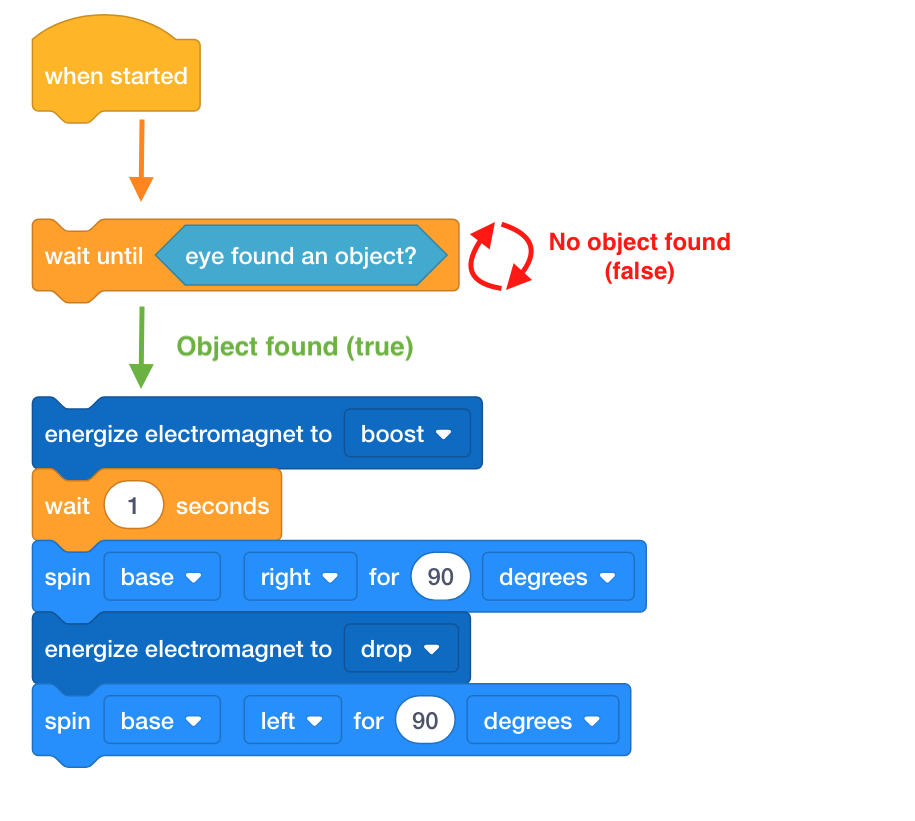
O que é o Fluxo do Projeto?
O Fluxo do Projeto descreve a ordem pela qual os blocos são executados num projeto. Todos os projetos fluem de cima para baixo, começando no bloco de chapéu [Quando iniciado]. Apenas um bloco é executado de cada vez e, depois de um bloco completar as suas ações ou comportamentos, o projeto passa para o bloco seguinte automaticamente. Certos blocos de controlo (a cor de laranja) podem modificar o fluxo do projeto, com base numa condição ou valor de parâmetro. Neste projeto, por exemplo, o bloco [Wait Until] irá interromper o fluxo do projeto e “esperar até” que a condição (neste caso, o sensor ocular encontrou um objeto) seja cumprida. Assim que esta condição for satisfeita (o sensor ocular encontrou um objeto, pelo que o bloco reporta um valor TRUE), o bloco [Wait Until] terminará e passará para o bloco seguinte do projeto.
Peças VEX GO
Para obter informações mais detalhadas sobre as peças e componentes eletrónicos do Kit VEX GO utilizados na unidade do braço robótico, consulte o Porções em o Kit VEX GO Artigo da Biblioteca VEX.