
Arrière-plan
Dans cette unité, les élèves exploreront l'évolution d'un bras robotique du manuel au motorisé puis à l'automatisé, et comment il peut être contrôlé pour accomplir une tâche à la main, avec des interrupteurs et en utilisant du code. Tout au long de l'unité, les étudiants auront l'occasion de réfléchir et de discuter des concepts liés à la mécanisation, à l'automatisation, au déroulement du projet et aux instructions conditionnelles, et d'établir des liens entre les processus humains et robotiques.
Constructions et fonctionnalités de cette unité
Il y a quatre builds dans cette unité :
- Un bras robotisé manuel
- Un bras robotisé motorisé
- Un bras robotisé codé qui se déplace sur 1 axe
- Un bras robotisé codé qui se déplace sur 2 axes
Ces builds peuvent être réalisées individuellement (construites à partir de zéro pour chaque laboratoire) ou sous forme de build de transition (la première build est modifiée dans les laboratoires suivants). Les principales caractéristiques de chaque build incluent :
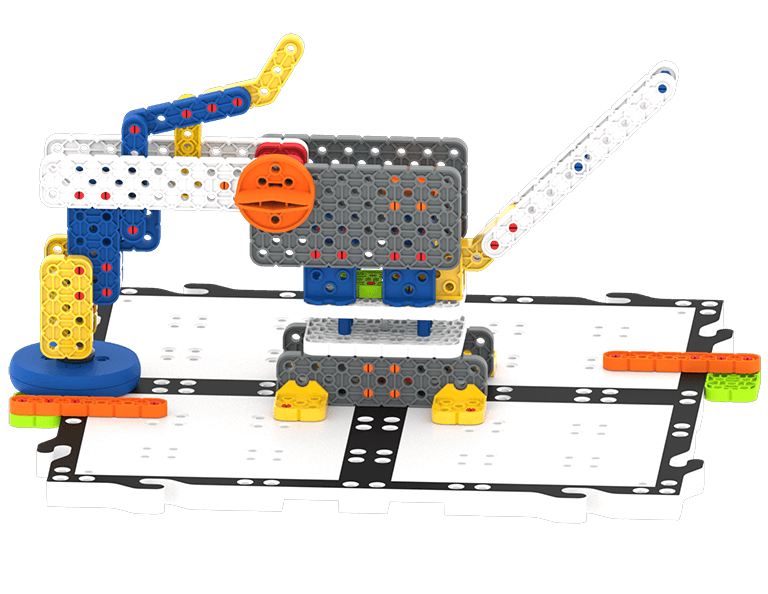
Bras robotisé : Un bras robotisé à commande manuelle qui est contrôlé en déplaçant le long faisceau blanc pour le faire tourner d'un côté à l'autre, ou les boutons orange pour déplacer le bras de haut en bas. Cette construction utilise un aimant Nord-Sud pour soulever les disques.
Bras robotisé motorisé: Un bras robotique qui utilise moteurs et switches bouger. Les moteurs et les interrupteurs sont connectés à une batterie. Cette construction utilise également un aimant Nord-Sud pour soulever les disques.
- Remarque : Cette construction nécessite 2 kits GO pour compléter 1 bras robotique.
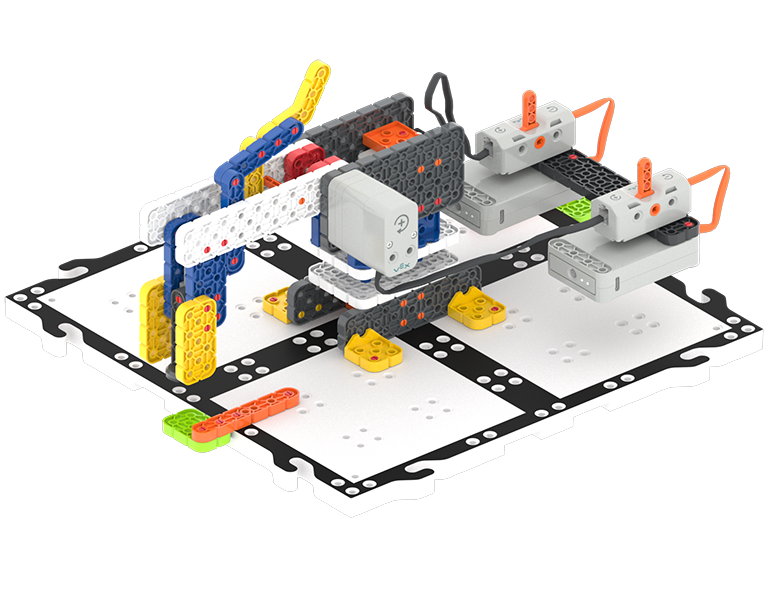
Bras de robot à code (1 axe): Un bras robotique avec des moteurs et un Cerveau qui est contrôlé à l'aide de VEXcode GO pour avancer 1 Axe - côte à côte. Cette version ajoute un Capteur oculaire, et utilise un Électro-aimant soulever les disques.
Code Bras robotique (2 axes) : La construction finale du bras robotique qui ajoute un moteur pour soulever le bras sur un deuxième axe - de haut en bas. Cette construction continue d'utiliser le capteur oculaire et l'électro-aimant pour soulever les disques.
Bras robotisés dans la vie réelle
Un bras robotisé est un type de bras mécanique, généralement programmable, qui fonctionne de manière similaire à un bras humain.

Les bras robotisés, qui peuvent se déplacer dans plusieurs directions différentes, peuvent être programmés pour effectuer de nombreuses tâches différentes. Certaines de ces tâches comprennent le soudage du métal, l’usinage, la peinture, l’assemblage d’objets, le placement d’objets dans d’autres machines et le tri d’objets. Ces robots effectuent souvent des tâches ennuyeuses, sales et dangereuses afin que les gens n’aient pas à les faire.

Les bras robotisés peuvent être équipés de tout type d’outil. Ces outils sont utilisés avec une précision, une exactitude, une rapidité et une répétitivité qui ne peuvent être égalées par les humains. Dans cette unité de laboratoire STEM, les élèves équiperont leur bras robotique d'un aimant et plus tard, d'un électro-aimant.
Ces bras robotiques peuvent utiliser des capteurs et des informations provenant de capteurs pour prendre des décisions sur leurs comportements. Dans les derniers laboratoires de l'unité, les élèves exploreront le fonctionnement du capteur oculaire et comment il peut être utilisé pour contrôler le mouvement du bras du robot.
Les robots industriels et l’automatisation constituent une part importante de la fabrication de la plupart des produits fabriqués dans le monde d’aujourd’hui. Pour une activité d’extension, demandez aux élèves de faire des recherches sur les robots industriels et de dresser une liste des produits qu’ils utilisent et qui ont été fabriqués ou triés par un bras robotisé.
Les solutions de laboratoire expliquées
Dans les laboratoires 3 à 5, les élèves utiliseront VEXcode GO pour créer des projets qui contrôlent le mouvement du bras du robot à l'aide de l'électro-aimant, du capteur oculaire, des moteurs et du cerveau. Le laboratoire 3 présente la programmation de base pour alimenter l'électro-aimant et faire tourner le bras du robot. Les laboratoires 4 et 5 explorent comment contrôler le bras robotisé grâce à la prise de décision dans le code et explorent le flux du projet à l'aide de conditions booléennes, d'instructions conditionnelles et du bloc [Forever] pour déplacer les disques et prendre des décisions basées sur la détection des couleurs.
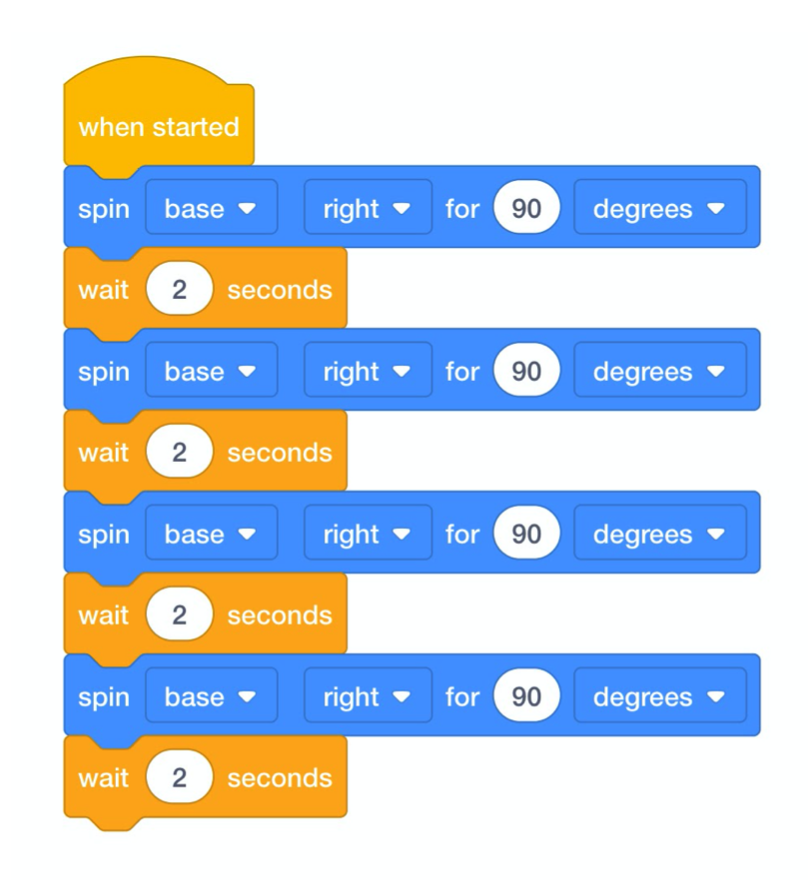
Solution de la partie 1 du jeu Lab 3
Ce projet permettra de réaliser le bras du robot :
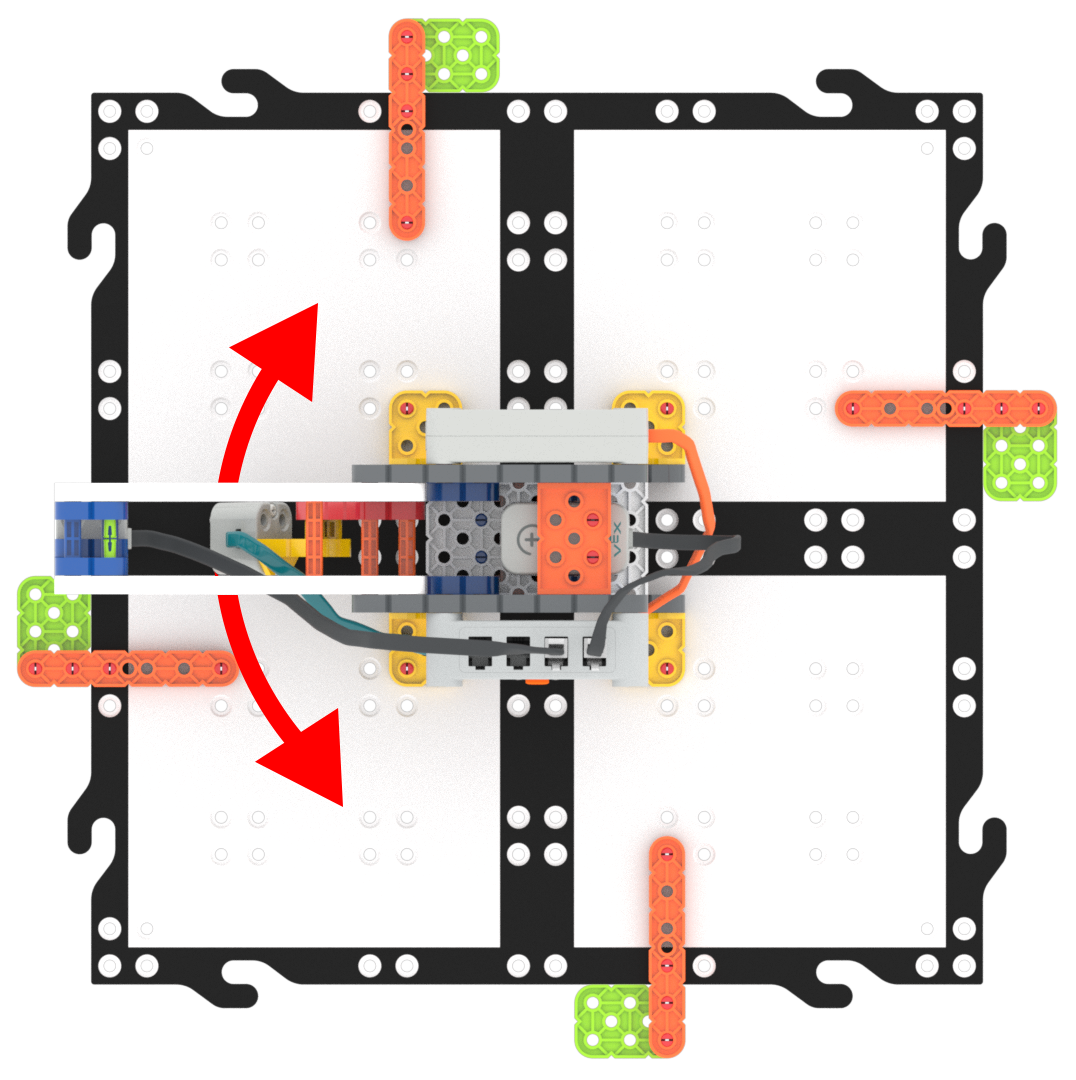
- Faites tourner le bras du robot vers la droite (à 90 degrés).
- Ensuite, attendez 2 secondes.
- Ensuite, répétez ce processus 3 fois de plus pour retourner complètement le bras du robot et le ramener à sa position de départ.
Solution de la partie 2 du jeu Lab 3
Ce projet permettra de réaliser le bras du robot :
- Activez l'électroaimant pour récupérer le disque.
- Ensuite, faites tourner le bras du robot vers la droite pour déplacer le disque.
- Déposez le disque dans un nouvel emplacement.
- Remettez le bras du robot à sa position de départ.
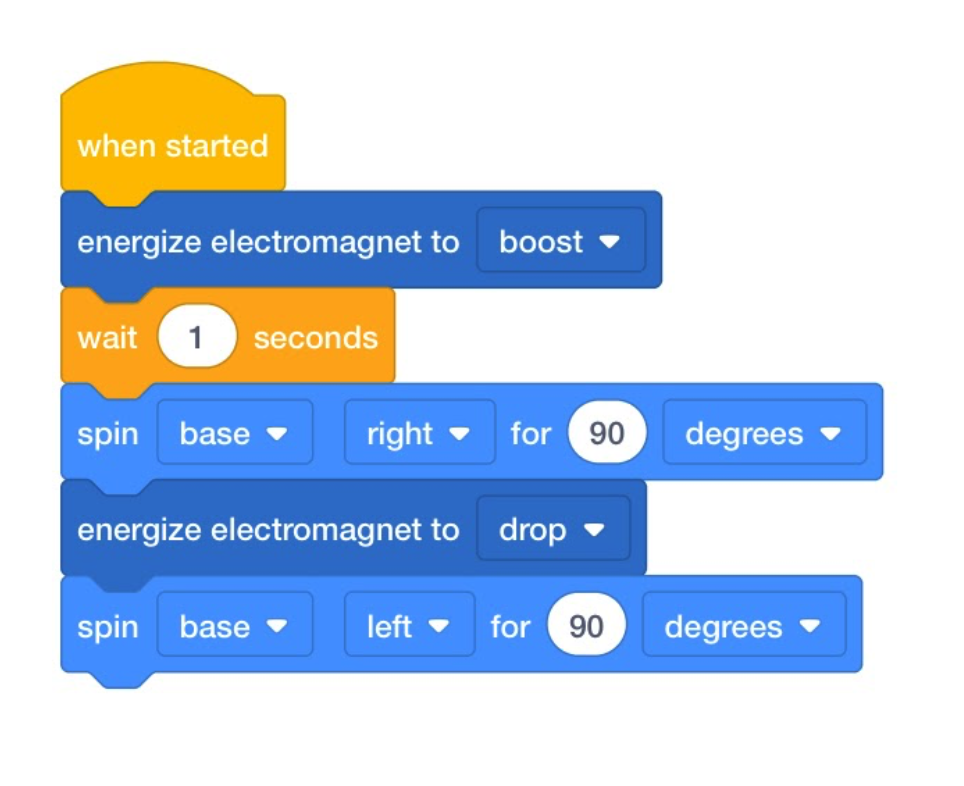
Remarque : Dans ce scénario, le disque heurtera le faisceau orange sur la tuile et devrait se séparer de l'aimant. C'est le comportement prévu.
Solution de la partie 1 du Lab 4 Play
Ce projet permettra de réaliser le bras du robot :
- Attendez que le capteur oculaire trouve un objet.
- Ensuite, alimentez l’électroaimant pour récupérer le disque.
- Ensuite, faites tourner le bras du robot vers la droite pour déplacer le dis
- Déposez le disque dans un nouvel emplacement.
- Remettez le bras du robot à sa position de départ.
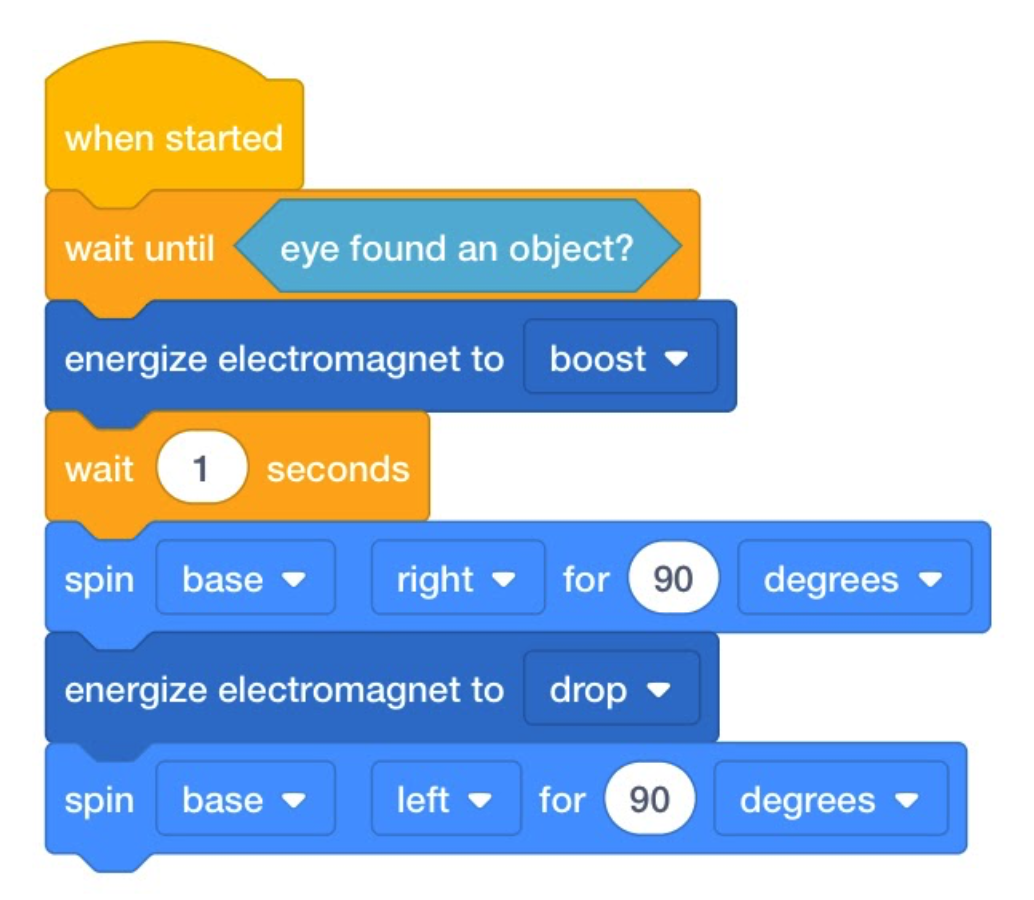
Remarque : Dans ce scénario, le disque heurtera le faisceau orange sur la tuile et devrait se séparer de l'aimant. C'est le comportement prévu.
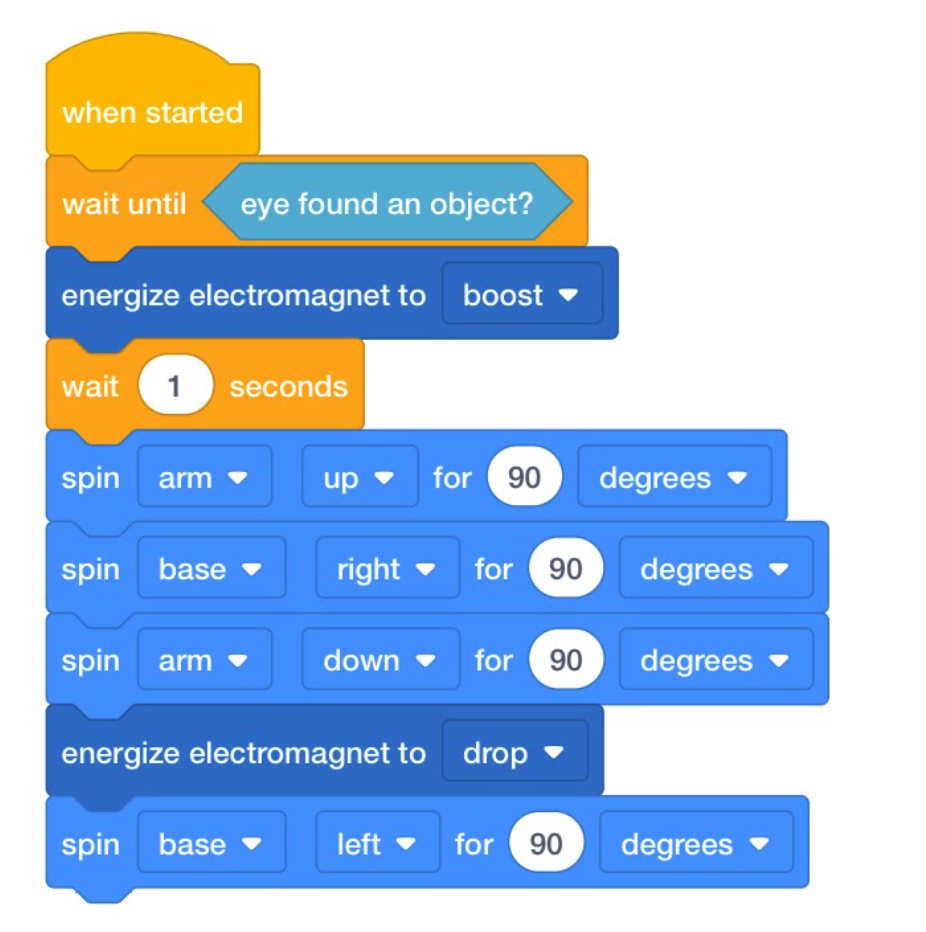
Solution de la partie 2 du Lab 4 Play
Ce projet permettra de réaliser le bras du robot :
- Attendez que le capteur oculaire trouve un objet.
- Ensuite, alimentez l’électroaimant pour récupérer le disque.
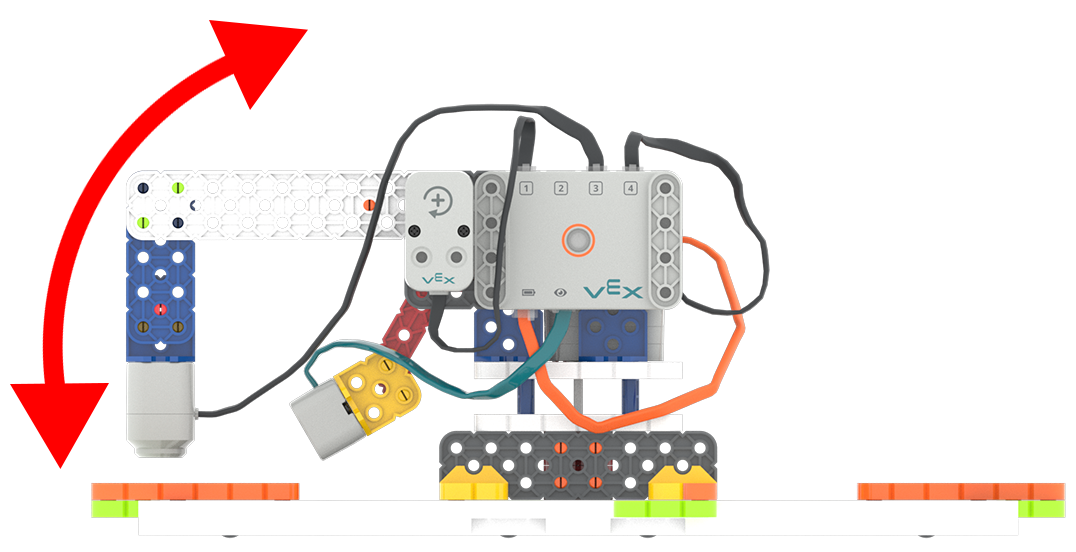
- Ensuite, déplacez le bras du robot vers le HAUT pour soulever le disque.
- Ensuite, faites tourner le bras du robot vers la droite pour déplacer le disque.
- Ensuite, déplacez le bras du robot vers le bas pour qu'il puisse laisser tomber le disque.
- Remettez le bras du robot à sa position de départ.
Ces projets utilisent le bloc [Attendre jusqu'à] pour contrôler le flux du projet afin d'attendre que le capteur oculaire détecte un objet avant d'activer l'électro-aimant. S'il n'attendait pas le capteur oculaire, l'électro-aimant se déplacerait sans capter le disque. Cela permet au robot de prendre une décision en fonction des données qu'il reçoit de son capteur oculaire.
Solution de la partie 1 du jeu Lab 5
Ce projet permettra de réaliser le bras du robot :
- Attendez que le capteur oculaire trouve un objet.
- Si l'objet est vert, il déplacera le disque comme il l'a fait dans le laboratoire 4.
- Le bras du robot recherchera continuellement un objet vert en raison du bloc [Forever] autour de la pile.
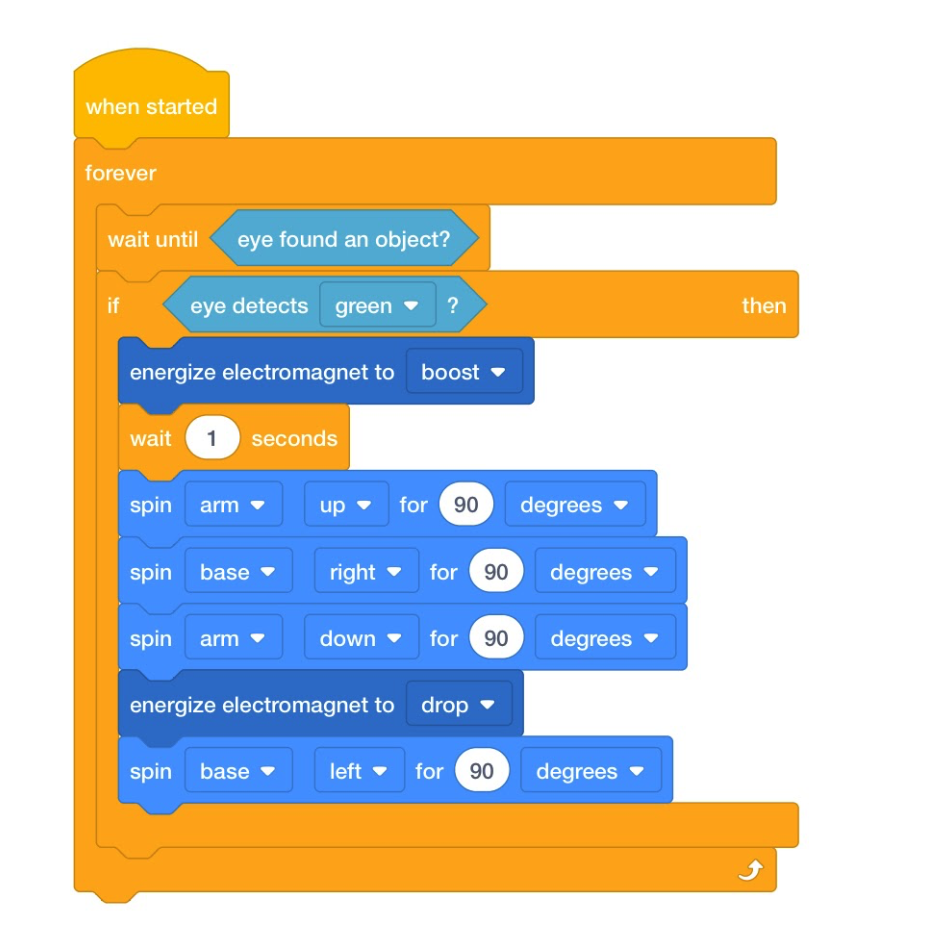
Solution de la partie 2 du jeu Lab 5
Ce projet permettra de réaliser le bras du robot :
- Attendez que le capteur oculaire trouve un objet.
- Si l'objet est vert, le bras du robot soulèvera le disque et le déplacera vers la droite de 90 degrés, puis laissera tomber le disque et reviendra à sa position de départ.
- Si l'objet est rouge, le bras du robot soulèvera le disque et le déplacera vers la droite de 180 degrés, puis laissera tomber le disque et reviendra à sa position de départ.
- Si l'objet est bleu, le bras du robot soulèvera le disque et le déplacera vers la gauche de 90 degrés, puis laissera tomber le disque et reviendra à sa position de départ.
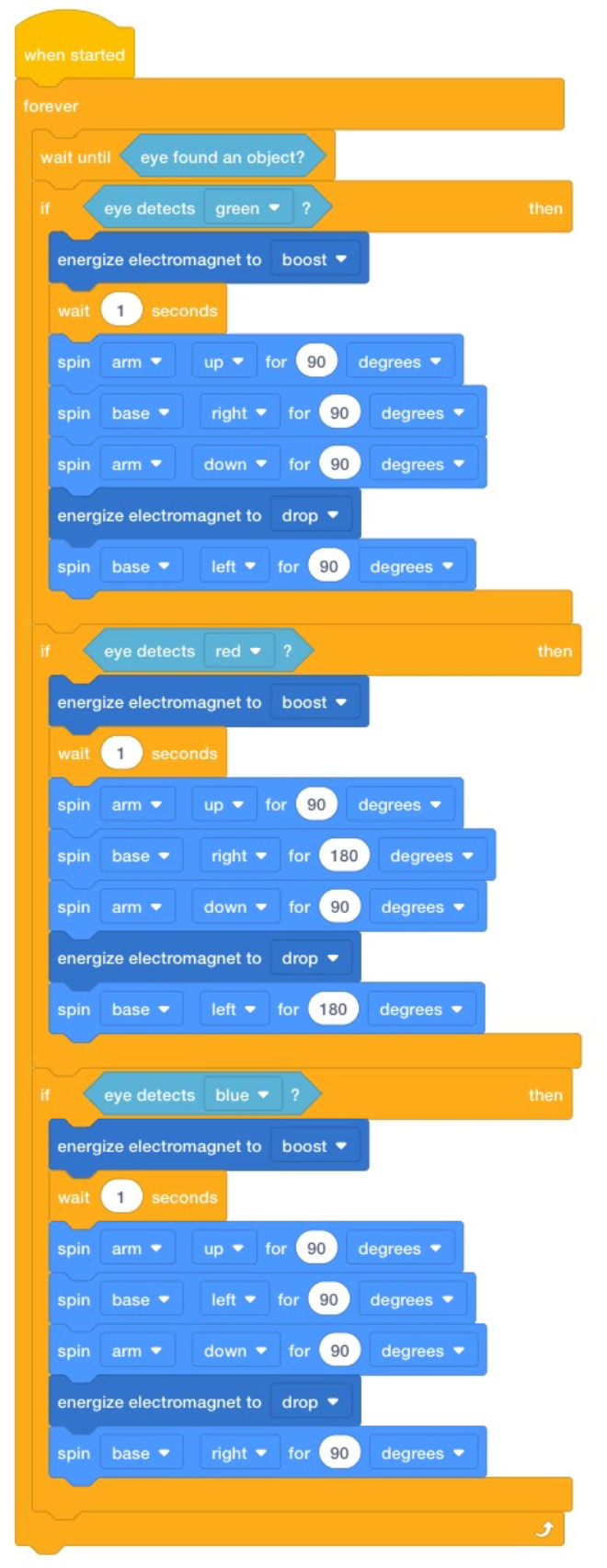
Ces projets ajoutent des instructions conditionnelles pour permettre au robot de prendre des décisions répétées en fonction des données du capteur oculaire. Ils sont répétés car le bloc [Forever] est utilisé pour indiquer au robot de vérifier continuellement les objets.
Pour plus d'informations sur les blocs individuels utilisés dans ces projets, utilisez le Aide fonctionnalité dans VEXcode GO. Pour plus d'informations sur les formes de blocs et leur signification, consultez le Bloc Formes et significations article dans la bibliothèque VEX. Si vous souhaitez en savoir plus sur le Les concepts informatiques derrière ces solutions de code, leFondamentaux de l'informatique Cours de certification d'éducateurça pourrait être pour toi.
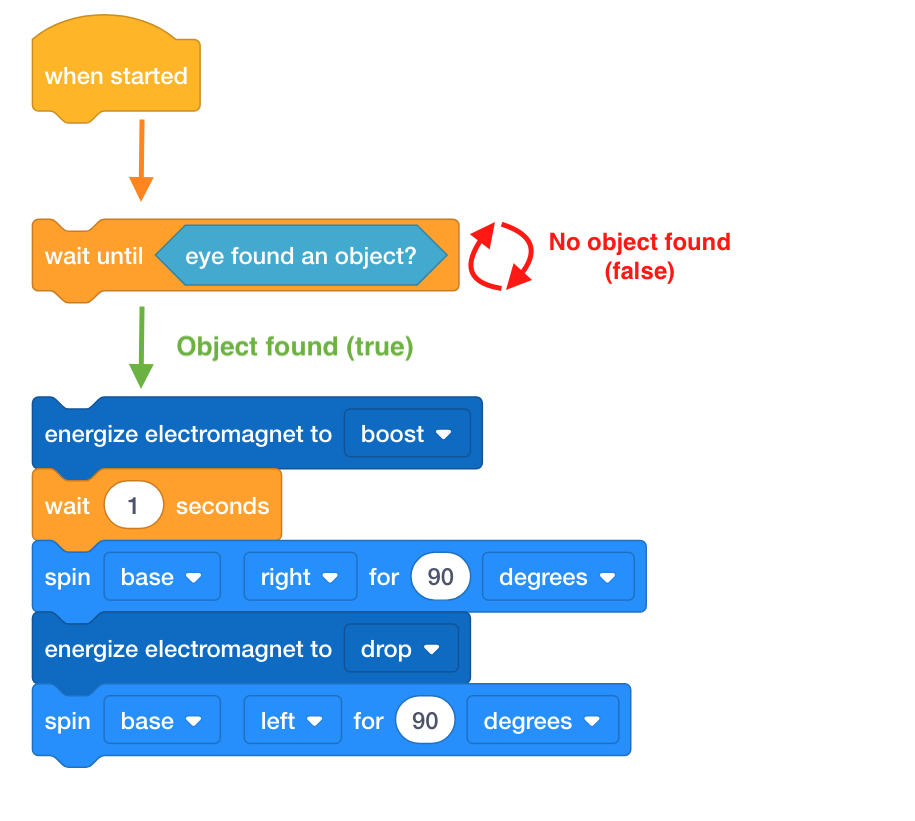
Qu'est-ce que Project Flow ?
Le flux de projet décrit l'ordre dans lequel les blocs sont exécutés dans un projet. Tous les projets se déroulent de haut en bas, en commençant par le bloc chapeau [Quand démarré]. Un seul bloc est exécuté à la fois, et une fois qu'un bloc a terminé ses actions ou comportements, le projet passe automatiquement au bloc suivant. Certains blocs de contrôle (de couleur orange) peuvent modifier le flux du projet, en fonction d'une condition ou d'une valeur de paramètre. Dans ce projet, par exemple, le bloc [Attendre jusqu'à] arrêtera le déroulement du projet et « attendra jusqu'à ce que » la condition (dans ce cas, le capteur oculaire ait trouvé un objet) soit remplie. Une fois cette condition remplie (le capteur oculaire a trouvé un objet, donc le bloc signale une valeur VRAI), le bloc [Attendre jusqu'à] se terminera et passera au bloc suivant du projet.
Pièces VEX GO
Pour plus d'informations sur les pièces du kit VEX GO et l'électronique utilisées dans l'unité de bras du robot, voir le Pièces dans le kit VEX GO Article de la bibliothèque VEX.