
Lý lịch
Trong Đơn vị này, học sinh sẽ khám phá quá trình tiến hóa của cánh tay rô-bốt từ thủ công sang cơ giới rồi đến tự động, và cách điều khiển nó để hoàn thành nhiệm vụ bằng tay, bằng công tắc và bằng mã. Trong suốt Đơn vị, sinh viên sẽ có cơ hội suy nghĩ và thảo luận về các khái niệm liên quan đến cơ giới hóa, tự động hóa, luồng dự án và các câu lệnh có điều kiện, cũng như tạo ra mối liên hệ giữa quy trình của con người và robot.
Cấu tạo và tính năng trong đơn vị này
Có bốn bản dựng trong Đơn vị này:
- Một cánh tay robot thủ công
- Một cánh tay robot cơ giới
- Một cánh tay robot mã hóa di chuyển trên 1 trục
- Một cánh tay robot mã hóa di chuyển trên 2 trục
Những bản dựng này có thể được hoàn thành riêng lẻ (xây dựng từ đầu cho mỗi Phòng thí nghiệm) hoặc như một bản dựng tạm thời (bản dựng đầu tiên được sửa đổi trong các Phòng thí nghiệm tiếp theo). Các tính năng chính của mỗi bản dựng bao gồm:
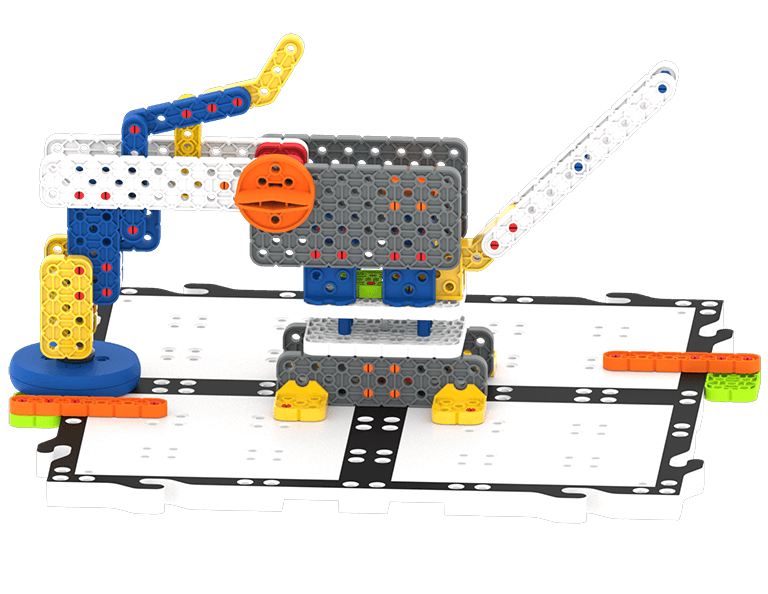
Cánh tay robot: Một cánh tay robot vận hành thủ công được điều khiển bằng cách di chuyển thanh dài màu trắng để xoay nó từ bên này sang bên kia hoặc núm màu cam để di chuyển cánh tay lên xuống. Bản dựng này sử dụng nam châm Bắc-Nam để nâng đĩa.
Cánh tay robot cơ giới: Một cánh tay robot sử dụng động cơ và công tắc để di chuyển. Động cơ và công tắc được kết nối với pin. Bản dựng này cũng sử dụng nam châm Bắc-Nam để nâng đĩa.
- Lưu ý: Bản dựng này cần 2 Bộ GO để hoàn thành 1 Cánh tay rô bốt.

Cánh tay robot mã (1 trục): Cánh tay robot có động cơ và Bộ não được điều khiển bằng VEXcode GO để di chuyển trên 1 Trục - từ bên này sang bên kia. Bản dựng này bổ sung thêm Cảm biến mắt và sử dụng Nam châm điện để nâng đĩa.

Mã cánh tay robot (2 trục): Bản dựng cánh tay robot cuối cùng bổ sung thêm động cơ để nâng cánh tay trên trục thứ hai - lên và xuống. Bản dựng này tiếp tục sử dụng Cảm biến mắt và Nam châm điện để nâng đĩa.

Cánh tay robot trong đời thực
Cánh tay robot là một loại cánh tay cơ học, thường có thể lập trình được, có chức năng tương tự như cánh tay con người.

Cánh tay robot có thể di chuyển theo nhiều hướng khác nhau và được lập trình để thực hiện nhiều nhiệm vụ khác nhau. Một số công việc này bao gồm hàn kim loại, gia công, sơn, lắp ráp đồ vật, đặt đồ vật vào máy khác và phân loại đồ vật. Những robot này thường làm những công việc nhàm chán, bẩn thỉu và nguy hiểm để con người không phải làm.

Cánh tay robot có thể được trang bị bất kỳ loại công cụ nào. Những công cụ này được sử dụng với độ chính xác, tốc độ và tính lặp lại mà con người không thể sánh kịp. Trong Đơn vị Thực hành STEM này, học sinh sẽ trang bị cho cánh tay robot của mình một nam châm và sau đó là một nam châm điện.
Những cánh tay robot này có thể sử dụng cảm biến và thông tin từ cảm biến để đưa ra quyết định về hành vi của chúng. Trong các Phòng thí nghiệm sau của Đơn vị, sinh viên sẽ khám phá cách Cảm biến mắt hoạt động và cách sử dụng cảm biến này để điều khiển chuyển động của Cánh tay Robot.
Robot công nghiệp và tự động hóa là một phần quan trọng trong quá trình sản xuất hầu hết các sản phẩm trên thế giới ngày nay. Đối với hoạt động mở rộng, hãy yêu cầu học sinh nghiên cứu về robot công nghiệp và lập danh sách các sản phẩm mà chúng sử dụng được chế tạo hoặc phân loại bằng cánh tay robot.
Giải pháp phòng thí nghiệm được giải thích
Trong Phòng thí nghiệm 3-5, học sinh sẽ sử dụng VEXcode GO để tạo các dự án điều khiển chuyển động của Cánh tay Robot bằng Nam châm điện, Cảm biến mắt, Động cơ và Não. Phòng thí nghiệm 3 giới thiệu về lập trình cơ bản để cấp điện cho Nam châm điện và quay Cánh tay Robot. Phòng thí nghiệm 4 và 5 khám phá cách điều khiển Cánh tay Robot thông qua việc ra quyết định trong mã và khám phá luồng dự án bằng cách sử dụng Điều kiện Boolean, Câu lệnh có điều kiện và khối [Mãi mãi] để di chuyển đĩa và đưa ra quyết định dựa trên cảm biến màu sắc.
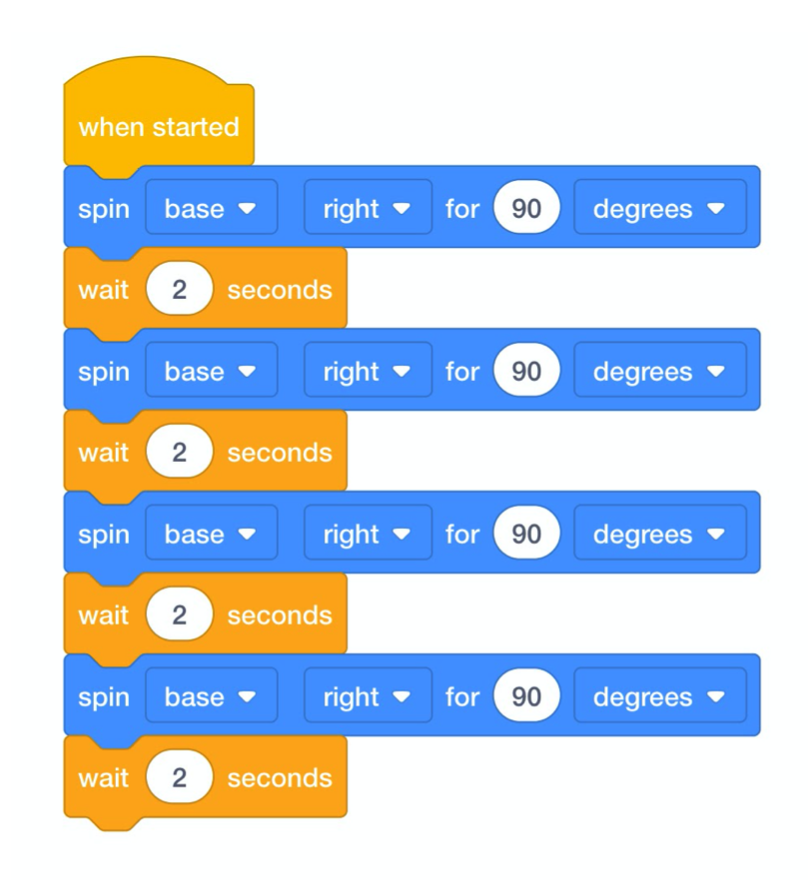
Giải pháp phần 1 của bài tập Lab 3
Dự án này sẽ tạo ra Cánh tay Robot:
- Xoay cánh tay robot sang phải (90 độ.)
- Sau đó, đợi 2 giây.
- Sau đó, lặp lại quá trình đó thêm 3 lần nữa để xoay hoàn toàn Cánh tay Robot và đưa nó trở về vị trí ban đầu.
Giải pháp phần 2 của bài tập Lab 3
Dự án này sẽ tạo ra Cánh tay Robot:
- Bật nam châm điện để nhấc đĩa lên.
- Sau đó, xoay cánh tay robot sang phải để di chuyển đĩa.
- Thả đĩa vào vị trí mới.
- Đưa cánh tay robot trở về vị trí ban đầu.
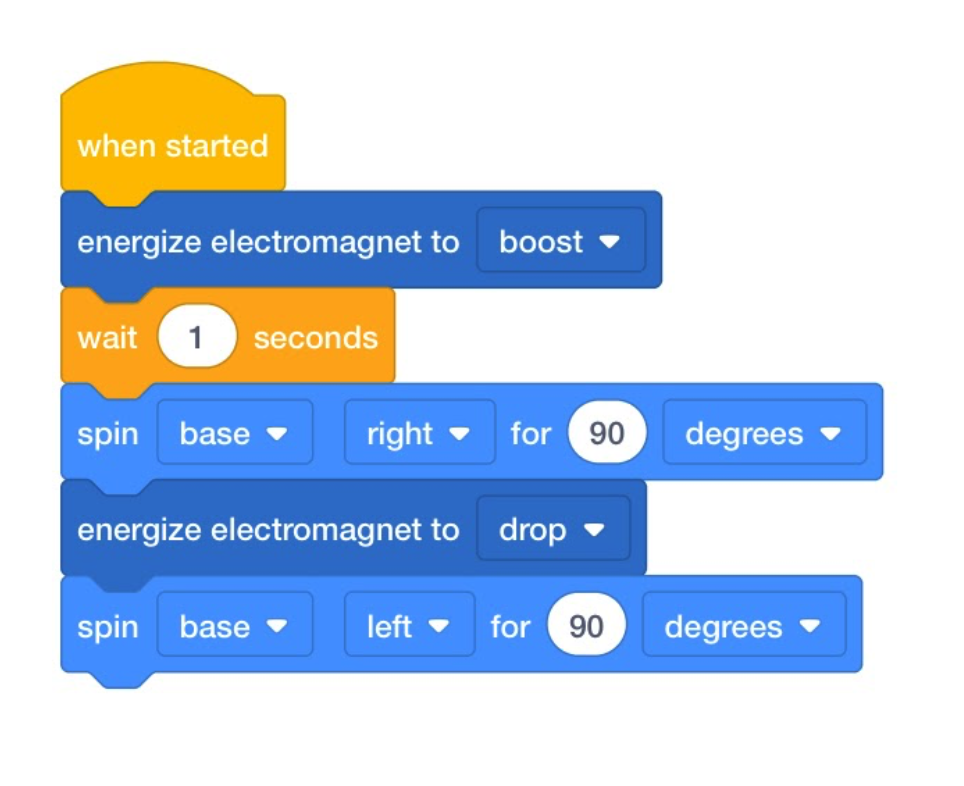
Lưu ý: Trong trường hợp này, đĩa sẽ chạm vào chùm tia màu cam trên ô và sẽ tách khỏi nam châm. Đây là hành vi mong muốn.
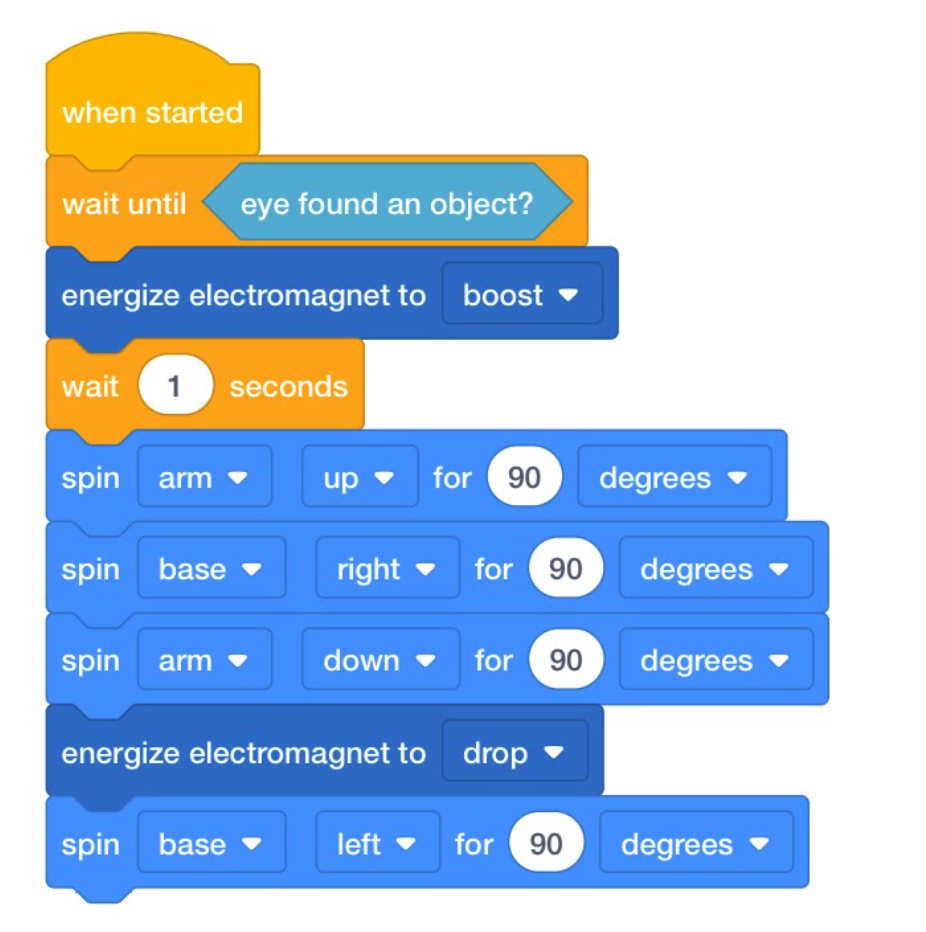
Giải pháp phần 1 của Lab 4 Play
Dự án này sẽ tạo ra Cánh tay Robot:
- Chờ cho đến khi cảm biến mắt tìm thấy vật thể.
- Sau đó, cấp năng lượng cho Nam châm điện để nhấc đĩa lên.
- Sau đó, xoay Cánh tay Robot sang phải để di chuyển
- Thả đĩa vào vị trí mới.
- Đưa cánh tay robot trở về vị trí ban đầu.
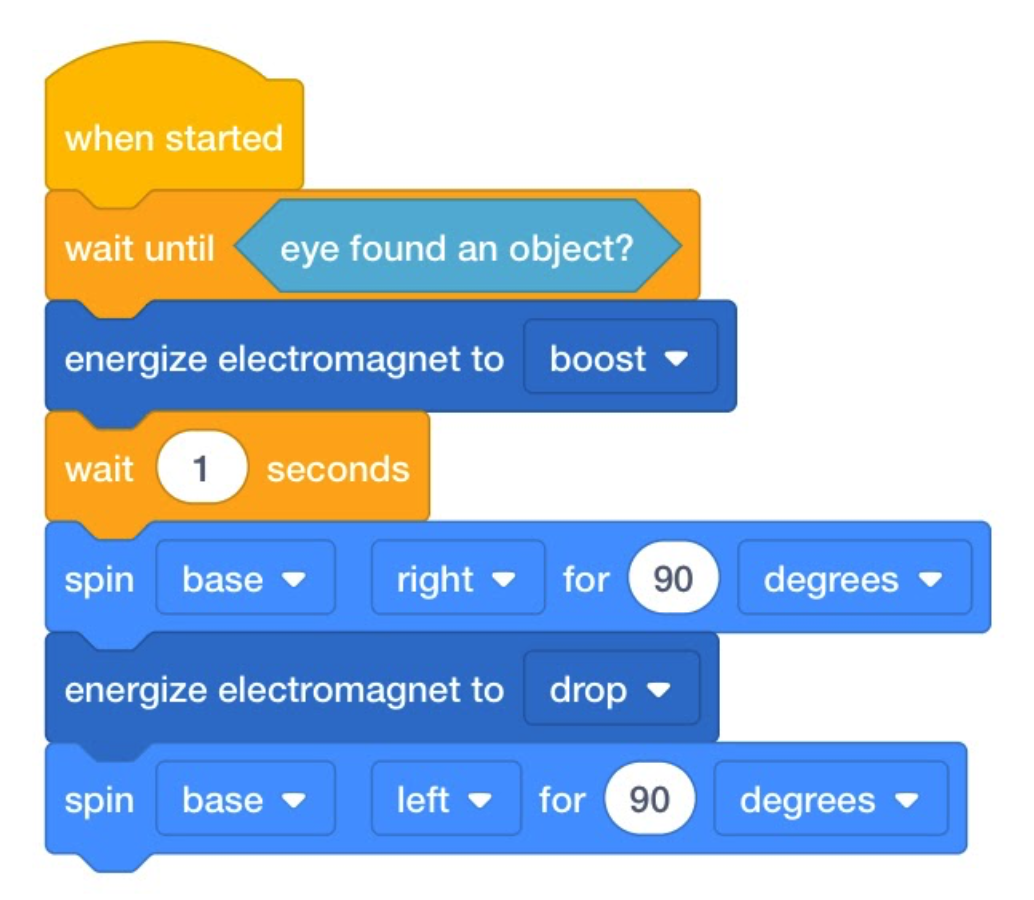
Lưu ý: Trong trường hợp này, đĩa sẽ chạm vào chùm tia màu cam trên ô và sẽ tách khỏi nam châm. Đây là hành vi mong muốn.
Giải pháp phần 2 của Lab 4 Play
Dự án này sẽ tạo ra Cánh tay Robot:
- Chờ cho đến khi cảm biến mắt tìm thấy vật thể.
- Sau đó, cấp năng lượng cho Nam châm điện để nhấc đĩa lên.
- Sau đó, di chuyển cánh tay robot LÊN để nâng đĩa.
- Sau đó, xoay cánh tay robot sang phải để di chuyển đĩa.
- Sau đó, di chuyển cánh tay robot XUỐNG để có thể thả đĩa xuống.
- Đưa cánh tay robot trở về vị trí ban đầu.
Các dự án này sử dụng khối [Chờ cho đến khi] để kiểm soát luồng dự án nhằm Chờ cho đến khi Cảm biến mắt phát hiện vật thể trước khi kích hoạt Nam châm điện. Nếu không đợi Cảm biến mắt, nam châm điện sẽ di chuyển mà không nhấc đĩa lên. Tính năng này cho phép robot đưa ra quyết định dựa trên dữ liệu nhận được từ Cảm biến mắt.
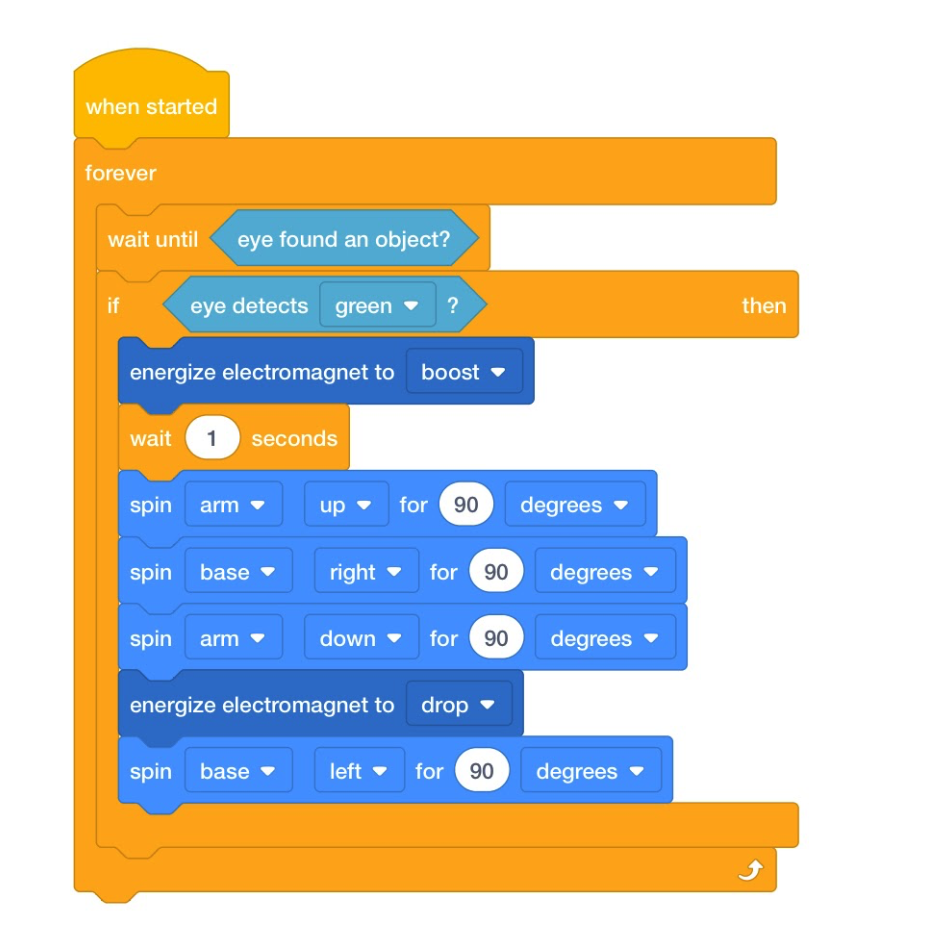
Giải pháp phần 1 của bài tập Lab 5
Dự án này sẽ tạo ra Cánh tay Robot:
- Chờ cho đến khi cảm biến mắt tìm thấy vật thể.
- Nếu vật thể có màu xanh lá cây thì nó sẽ di chuyển đĩa như trong Phòng thí nghiệm 4.
- Cánh tay robot sẽ liên tục kiểm tra vật thể màu xanh lá cây vì có khối [Mãi mãi] xung quanh ngăn xếp.
Giải bài tập Lab 5 Play Phần 2
Dự án này sẽ tạo ra Cánh tay Robot:
- Chờ cho đến khi cảm biến mắt tìm thấy vật thể.
- Nếu vật thể có màu xanh lá cây, cánh tay robot sẽ nâng đĩa lên và di chuyển nó sang phải 90 độ, sau đó thả đĩa xuống và trở về vị trí ban đầu.
- Nếu vật thể có màu đỏ, cánh tay robot sẽ nâng đĩa lên và di chuyển nó sang phải 180 độ, sau đó thả đĩa xuống và trở về vị trí ban đầu.
- Nếu vật thể có màu xanh, cánh tay robot sẽ nâng đĩa lên và di chuyển nó sang trái 90 độ, sau đó thả đĩa xuống và trở về vị trí ban đầu.

Các dự án này thêm các câu lệnh có điều kiện để cho phép robot đưa ra các quyết định lặp lại dựa trên dữ liệu từ Cảm biến mắt. Chúng được lặp lại vì khối [Mãi mãi] được sử dụng để yêu cầu robot liên tục kiểm tra các vật thể.
Để biết thêm thông tin về từng khối được sử dụng trong các dự án này, hãy sử dụng tính năng Trợ giúp trong VEXcode GO. Để biết thêm thông tin về hình khối và ý nghĩa của chúng, hãy xem bài viết Hình khối và ý nghĩa trong Thư viện VEX. Nếu bạn muốn tìm hiểu thêm về các khái niệm Khoa học máy tính đằng sau các giải pháp mã này, học chứng nhận dành cho giáo viên cơ bản về khoa học máy tính có thể dành cho bạn.
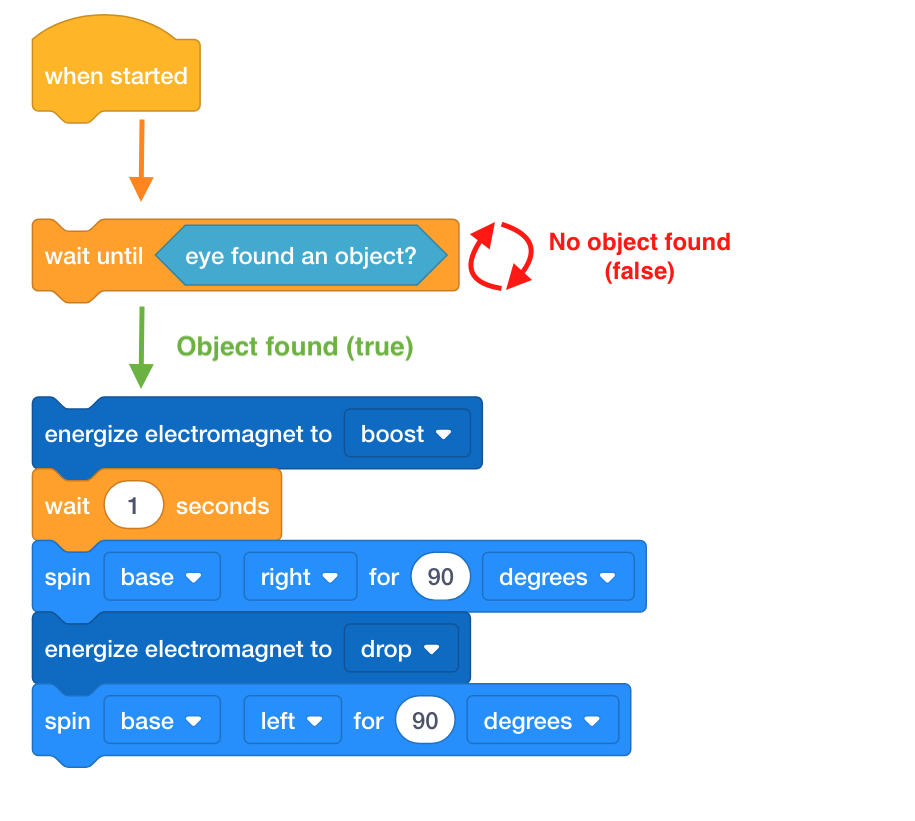
Project Flow là gì?
Project Flow mô tả thứ tự các khối được thực hiện trong một dự án. Tất cả các dự án chảy từ trên xuống dưới, bắt đầu từ khối mũ [Khi bắt đầu]. Chỉ có một khối được thực hiện tại một thời điểm và khi một khối đã hoàn thành các hành động hoặc hành vi của nó, dự án sẽ tự động chuyển sang khối tiếp theo. Một số khối Điều khiển nhất định (màu cam) có thể sửa đổi luồng dự án, dựa trên một điều kiện hoặc giá trị tham số. Trong dự án này, ví dụ, khối [Chờ cho đến khi] sẽ dừng dòng chảy của dự án và “chờ cho đến khi” điều kiện (trong trường hợp này, cảm biến mắt có tìm thấy một đối tượng), được đáp ứng. Khi điều kiện đó được đáp ứng (cảm biến mắt tìm thấy một đối tượng, vì vậy khối báo cáo giá trị TRUE), khối [Đợi cho đến khi] sẽ kết thúc và chuyển sang khối tiếp theo trong dự án.
VEX GO Pieces
Để biết thông tin chi tiết hơn về các bộ phận và thiết bị điện tử của Bộ VEX GO được sử dụng trong Bộ cánh tay robot, hãy xem Bộ phận trong Bài viết Thư viện VEX của Bộ VEX GO.