
പശ്ചാത്തലം
ഈ യൂണിറ്റിൽ, മാനുവൽ മുതൽ മോട്ടോറൈസ്ഡ് വരെയും ഓട്ടോമേറ്റഡ് വരെയും ഒരു റോബോട്ടിക് കൈയുടെ പരിണാമം, സ്വിച്ചുകൾ ഉപയോഗിച്ചും കോഡ് ഉപയോഗിച്ചും കൈകൊണ്ട് ഒരു ജോലി എങ്ങനെ നിയന്ത്രിക്കാമെന്ന് വിദ്യാർത്ഥികൾ പര്യവേക്ഷണം ചെയ്യും. യൂണിറ്റിലുടനീളം വിദ്യാർത്ഥികൾക്ക് യന്ത്രവൽക്കരണം, ഓട്ടോമേഷൻ, പ്രോജക്റ്റ് ഫ്ലോ, കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ എന്നിവയുമായി ബന്ധപ്പെട്ട ആശയങ്ങളെക്കുറിച്ച് ചിന്തിക്കാനും ചർച്ച ചെയ്യാനും മനുഷ്യനും റോബോട്ടിക് പ്രക്രിയകളും തമ്മിലുള്ള ബന്ധം സ്ഥാപിക്കാനും അവസരം ലഭിക്കും.
ഈ യൂണിറ്റിലെ ബിൽഡുകളും സവിശേഷതകളും
ഈ യൂണിറ്റിൽ നാല് നിർമ്മാണങ്ങളുണ്ട്:
- ഒരു മാനുവൽ റോബോട്ട് ആം
- ഒരു മോട്ടറൈസ്ഡ് റോബോട്ട് കൈ
- ഒരു അച്ചുതണ്ടിൽ ചലിക്കുന്ന ഒരു കോഡ് റോബോട്ട് ആം
- രണ്ട് അച്ചുതണ്ടുകളിൽ ചലിക്കുന്ന ഒരു കോഡ് റോബോട്ട് ആം
ഈ ബിൽഡുകൾ വ്യക്തിഗതമായി പൂർത്തിയാക്കാം (ഓരോ ലാബിനും ആദ്യം മുതൽ നിർമ്മിച്ചത്), അല്ലെങ്കിൽ ഒരു ട്രാൻസിഷണൽ ബിൽഡ് ആയി (ആദ്യ ബിൽഡ് തുടർന്നുള്ള ലാബുകളിൽ പരിഷ്കരിക്കും). ഓരോ നിർമ്മാണത്തിന്റെയും പ്രധാന സവിശേഷതകളിൽ ഇവ ഉൾപ്പെടുന്നു:
റോബോട്ട് ഭുജം: വെളുത്ത നീളമുള്ള ബീം വശങ്ങളിൽ നിന്ന് വശത്തേക്ക് തിരിക്കാൻ നീക്കിയോ, ഓറഞ്ച് നോബുകൾ ഉപയോഗിച്ച് കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിച്ചോ നിയന്ത്രിക്കുന്ന, സ്വമേധയാ പ്രവർത്തിപ്പിക്കുന്ന ഒരു റോബോട്ടിക് ഭുജം. ഡിസ്കുകൾ ഉയർത്താൻ ഈ ബിൽഡ് ഒരു വടക്ക്-തെക്ക് കാന്തം ഉപയോഗിക്കുന്നു.

മോട്ടോറൈസ്ഡ് റോബോട്ട് ആം: ചലിക്കാൻ മോട്ടോറുകൾ ഉം സ്വിച്ചുകളും ഉപയോഗിക്കുന്ന ഒരു റോബോട്ടിക് ആം. മോട്ടോറുകളും സ്വിച്ചുകളും ഒരു ബാറ്ററിയുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. ഡിസ്കുകൾ ഉയർത്താൻ ഈ ബിൽഡിൽ ഒരു വടക്ക്-തെക്ക് കാന്തവും ഉപയോഗിക്കുന്നു.
- കുറിപ്പ്: ഈ ബിൽഡിന് 1 റോബോട്ടിക് കൈ പൂർത്തിയാക്കാൻ 2 GO കിറ്റുകൾ ആവശ്യമാണ്.

കോഡ് റോബോട്ട് ആം (1-ആക്സിസ്): മോട്ടോറുകളുള്ള ഒരു റോബോട്ടിക് ആം, 1 ആക്സിസിൽ - വശങ്ങളിൽ നിന്ന് വശത്തേക്ക് നീങ്ങാൻ VEXcode GO ഉപയോഗിച്ച് നിയന്ത്രിക്കുന്ന ബ്രെയിൻ. ഈ ബിൽഡ് ഒരു ഐ സെൻസർചേർക്കുന്നു, കൂടാതെ ഡിസ്കുകൾ ഉയർത്താൻ ഇലക്ട്രോമാഗ്നറ്റ് ഉപയോഗിക്കുന്നു.

കോഡ് റോബോട്ട് ആം (2-ആക്സിസ്): രണ്ടാമത്തെ ആക്സിസിൽ - മുകളിലേക്കും താഴേക്കും - ഭുജം ഉയർത്താൻ ഒരു മോട്ടോർ ചേർക്കുന്ന അവസാന റോബോട്ടിക് ആം ബിൽഡ്. ഡിസ്കുകൾ ഉയർത്താൻ ഈ ബിൽഡ് ഐ സെൻസറും ഇലക്ട്രോമാഗ്നറ്റും ഉപയോഗിക്കുന്നത് തുടരുന്നു.

യഥാർത്ഥ ജീവിതത്തിലെ റോബോട്ടിക് കൈകൾ
റോബോട്ടിക് ഭുജം എന്നത് ഒരു തരം മെക്കാനിക്കൽ ഭുജമാണ്, സാധാരണയായി പ്രോഗ്രാം ചെയ്യാവുന്നതും, മനുഷ്യ ഭുജത്തിന് സമാനമായി പ്രവർത്തിക്കുന്നതുമാണ്.

വ്യത്യസ്ത ദിശകളിലേക്ക് ചലിക്കാൻ കഴിയുന്ന റോബോട്ടിക് കൈകൾക്ക് വ്യത്യസ്ത ജോലികൾ ചെയ്യുന്നതിനായി പ്രോഗ്രാം ചെയ്യാൻ കഴിയും. ലോഹ വെൽഡിംഗ്, യന്ത്രവൽക്കരണം, പെയിന്റിംഗ്, വസ്തുക്കൾ കൂട്ടിച്ചേർക്കൽ, മറ്റ് യന്ത്രങ്ങളിൽ വസ്തുക്കൾ സ്ഥാപിക്കൽ, വസ്തുക്കൾ തരംതിരിക്കൽ എന്നിവ ഈ ജോലികളിൽ ചിലതാണ്. ഈ റോബോട്ടുകൾ പലപ്പോഴും മുഷിഞ്ഞതും, വൃത്തികെട്ടതും, അപകടകരവുമായ ജോലികൾ ചെയ്യുന്നതിനാൽ ആളുകൾക്ക് അവ ചെയ്യേണ്ടതില്ല.
 കാർ നിർമ്മാണത്തിലെ
കാർ നിർമ്മാണത്തിലെ റോബോട്ടിക് കൈകളിൽ ഏത് തരത്തിലുള്ള ഉപകരണവും സജ്ജീകരിക്കാം. മനുഷ്യർക്ക് കിടപിടിക്കാൻ കഴിയാത്തത്ര കൃത്യത, കൃത്യത, വേഗത, ആവർത്തനക്ഷമത എന്നിവയോടെയാണ് ഈ ഉപകരണങ്ങൾ ഉപയോഗിക്കുന്നത്. ഈ STEM ലാബ് യൂണിറ്റിൽ, വിദ്യാർത്ഥികൾ അവരുടെ റോബോട്ട് ആം ബിൽഡിൽ ഒരു കാന്തവും പിന്നീട് ഒരു വൈദ്യുതകാന്തികവും സജ്ജീകരിക്കും.
ഈ റോബോട്ടിക് കൈകൾക്ക് സെൻസറുകളും സെൻസറുകളിൽ നിന്നുള്ള വിവരങ്ങളും ഉപയോഗിച്ച് അവയുടെ പെരുമാറ്റങ്ങളെക്കുറിച്ചുള്ള തീരുമാനങ്ങൾ എടുക്കാൻ കഴിയും. യൂണിറ്റിന്റെ പിന്നീടുള്ള ലാബുകളിൽ, ഐ സെൻസർ എങ്ങനെ പ്രവർത്തിക്കുന്നുവെന്നും റോബോട്ട് കൈയുടെ ചലനം നിയന്ത്രിക്കാൻ അത് എങ്ങനെ ഉപയോഗിക്കാമെന്നും വിദ്യാർത്ഥികൾ പര്യവേക്ഷണം ചെയ്യും.
ഇന്നത്തെ ലോകത്ത് ഉൽപ്പാദിപ്പിക്കുന്ന മിക്ക ഉൽപ്പന്നങ്ങളുടെയും നിർമ്മാണത്തിൽ വ്യാവസായിക റോബോട്ടുകളും ഓട്ടോമേഷനും ഒരു പ്രധാന പങ്കു വഹിക്കുന്നു. ഒരു വിപുലീകരണ പ്രവർത്തനത്തിനായി, വിദ്യാർത്ഥികൾ വ്യാവസായിക റോബോട്ടുകളെക്കുറിച്ച് ഗവേഷണം നടത്തുകയും അവർ ഉപയോഗിക്കുന്നതും ഒരു റോബോട്ടിക് കൈകൊണ്ട് നിർമ്മിച്ചതോ തരംതിരിച്ചതോ ആയ ഉൽപ്പന്നങ്ങളുടെ ഒരു പട്ടിക തയ്യാറാക്കുകയും ചെയ്യുക.
ലാബ് സൊല്യൂഷൻസ് വിശദീകരിച്ചു
ലാബ്സ് 3-5-ൽ, വിദ്യാർത്ഥികൾ VEXcode GO ഉപയോഗിച്ച് ഇലക്ട്രോമാഗ്നറ്റ്, ഐ സെൻസർ, മോട്ടോറുകൾ, ബ്രെയിൻ എന്നിവ ഉപയോഗിച്ച് റോബോട്ട് ആമിന്റെ ചലനം നിയന്ത്രിക്കുന്ന പ്രോജക്ടുകൾ സൃഷ്ടിക്കും. ഇലക്ട്രോമാഗ്നറ്റിനെ ഊർജ്ജസ്വലമാക്കുന്നതിനും റോബോട്ട് ഭുജത്തെ തിരിക്കുന്നതിനുമുള്ള അടിസ്ഥാന പ്രോഗ്രാമിംഗ് ലാബ് 3 അവതരിപ്പിക്കുന്നു. കോഡിലെ തീരുമാനമെടുക്കലിലൂടെ റോബോട്ട് ആമിനെ എങ്ങനെ നിയന്ത്രിക്കാമെന്ന് ലാബുകൾ 4 ഉം 5 ഉം പര്യവേക്ഷണം ചെയ്യുന്നു, കൂടാതെ ബൂളിയൻ കണ്ടീഷനുകൾ, കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ, [Forever] ബ്ലോക്ക് എന്നിവ ഉപയോഗിച്ച് ഡിസ്കുകൾ നീക്കുന്നതിനും കളർ സെൻസിംഗിനെ അടിസ്ഥാനമാക്കി തീരുമാനങ്ങൾ എടുക്കുന്നതിനും പ്രോജക്റ്റ് ഫ്ലോ പര്യവേക്ഷണം ചെയ്യുന്നു.
ലാബ് 3 പ്ലേ പാർട്ട് 1 സൊല്യൂഷൻ
ഈ പ്രോജക്റ്റ് റോബോട്ട് കൈ നിർമ്മിക്കും:
- റോബോട്ട് കൈ വലത്തേക്ക് തിരിക്കുക (90 ഡിഗ്രിക്ക്.)
- പിന്നെ, 2 സെക്കൻഡ് കാത്തിരിക്കുക.
- പിന്നെ, ആ പ്രക്രിയ 3 തവണ കൂടി ആവർത്തിക്കുക, അങ്ങനെ റോബോട്ട് ആം പൂർണ്ണമായും തിരിഞ്ഞ് അതിന്റെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ കൊണ്ടുവരിക.

ലാബ് 3 പ്ലേ പാർട്ട് 2 സൊല്യൂഷൻ
ഈ പ്രോജക്റ്റ് റോബോട്ട് കൈ നിർമ്മിക്കും:
- ഡിസ്ക് എടുക്കാൻ ഇലക്ട്രോമാഗ്നറ്റിനെ ഊർജ്ജസ്വലമാക്കുക.
- പിന്നെ, ഡിസ്ക് നീക്കാൻ റോബോട്ട് ആം വലത്തേക്ക് തിരിക്കുക.
- ഡിസ്ക് ഒരു പുതിയ സ്ഥലത്ത് ഇടുക.
- റോബോട്ട് ആം അതിന്റെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ കൊണ്ടുവരിക.

കുറിപ്പ്: ഈ സാഹചര്യത്തിൽ, ഡിസ്ക് ടൈലിലെ ഓറഞ്ച് ബീമിൽ ഇടിക്കുകയും കാന്തത്തിൽ നിന്ന് വേർപെടുകയും ചെയ്യും. ഇതാണ് ഉദ്ദേശിച്ച പെരുമാറ്റം.
ലാബ് 4 പ്ലേ പാർട്ട് 1 സൊല്യൂഷൻ
ഈ പ്രോജക്റ്റ് റോബോട്ട് കൈ നിർമ്മിക്കും:
- ഐ സെൻസർ ഒരു വസ്തു കണ്ടെത്തുന്നതുവരെ കാത്തിരിക്കുക.
- പിന്നെ, ഡിസ്ക് എടുക്കാൻ ഇലക്ട്രോമാഗ്നറ്റിന് ഊർജ്ജം നൽകുക.
- പിന്നെ, റോബോട്ട് ആം വലത്തേക്ക് കറക്കി ഡിസ് നീക്കുക.
- ഡിസ്ക് ഒരു പുതിയ സ്ഥലത്ത് ഇടുക.
- റോബോട്ട് ആം അതിന്റെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ കൊണ്ടുവരിക.

കുറിപ്പ്: ഈ സാഹചര്യത്തിൽ, ഡിസ്ക് ടൈലിലെ ഓറഞ്ച് ബീമിൽ ഇടിക്കുകയും കാന്തത്തിൽ നിന്ന് വേർപെടുകയും ചെയ്യും. ഇതാണ് ഉദ്ദേശിച്ച പെരുമാറ്റം.
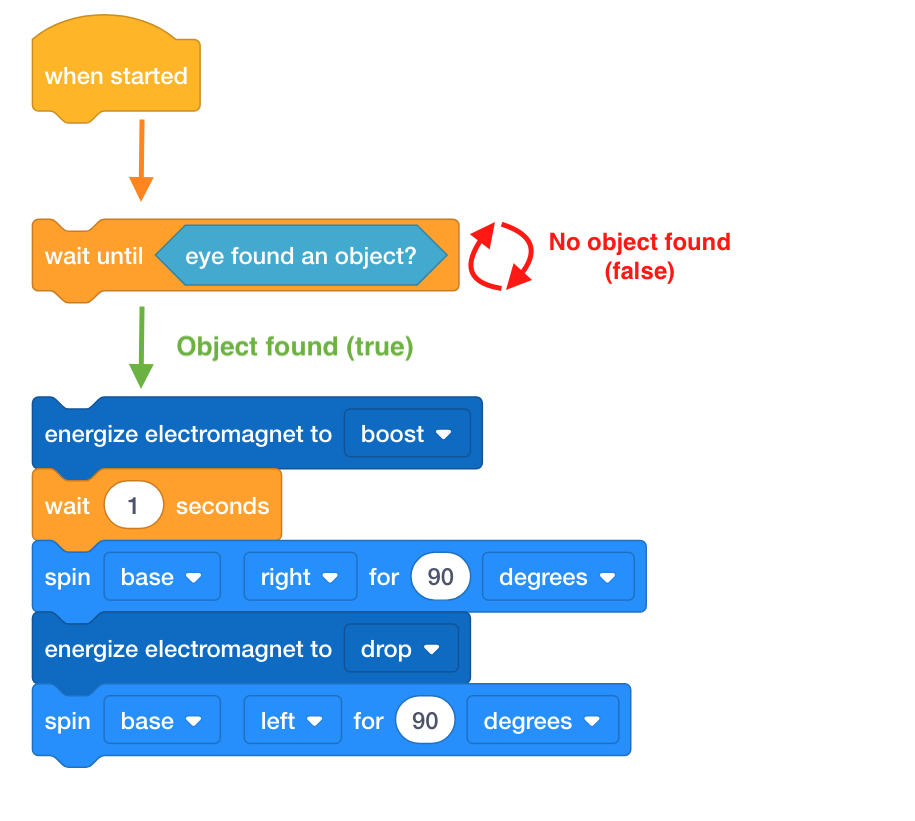
ലാബ് 4 പ്ലേ പാർട്ട് 2 സൊല്യൂഷൻ
ഈ പ്രോജക്റ്റ് റോബോട്ട് കൈ നിർമ്മിക്കും:
- ഐ സെൻസർ ഒരു വസ്തു കണ്ടെത്തുന്നത് വരെ കാത്തിരിക്കുക.
- പിന്നെ, ഡിസ്ക് എടുക്കാൻ ഇലക്ട്രോമാഗ്നറ്റിന് ഊർജ്ജം നൽകുക.
- പിന്നെ, ഡിസ്ക് ഉയർത്താൻ റോബോട്ട് കൈ മുകളിലേക്ക് നീക്കുക.
- പിന്നെ, ഡിസ്ക് നീക്കാൻ റോബോട്ട് ആം വലത്തേക്ക് തിരിക്കുക.
- പിന്നെ, റോബോട്ട് കൈ താഴേക്ക് നീക്കുക, അങ്ങനെ ഡിസ്ക് താഴെയിടാം.
- റോബോട്ട് ആം അതിന്റെ ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങുക.

ഈ പ്രോജക്റ്റുകൾ, ഇലക്ട്രോമാഗ്നറ്റിനെ ഊർജ്ജസ്വലമാക്കുന്നതിന് മുമ്പ് ഐ സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തുന്നതുവരെ കാത്തിരിക്കുക എന്ന പ്രോജക്റ്റിന്റെ ഒഴുക്ക് നിയന്ത്രിക്കുന്നതിന് [Wait until] ബ്ലോക്ക് ഉപയോഗിക്കുന്നു. ഐ സെൻസറിനായി കാത്തിരുന്നില്ലെങ്കിൽ, ഇലക്ട്രോമാഗ്നറ്റ് ഡിസ്ക് എടുക്കാതെ തന്നെ നീങ്ങും. ഇത് റോബോട്ടിന് അതിന്റെ ഐ സെൻസറിൽ നിന്ന് ലഭിക്കുന്ന ഡാറ്റയെ അടിസ്ഥാനമാക്കി തീരുമാനമെടുക്കാൻ പ്രാപ്തമാക്കുന്നു.
ലാബ് 5 പ്ലേ പാർട്ട് 1 സൊല്യൂഷൻ
ഈ പ്രോജക്റ്റ് റോബോട്ട് കൈ നിർമ്മിക്കും:
- ഐ സെൻസർ ഒരു വസ്തു കണ്ടെത്തുന്നതുവരെ കാത്തിരിക്കുക.
- വസ്തു പച്ചയാണെങ്കിൽ അത് ലാബ് 4-ൽ ചെയ്തതുപോലെ ഡിസ്ക് നീക്കും.
- സ്റ്റാക്കിന് ചുറ്റുമുള്ള [Forever] ബ്ലോക്ക് കാരണം റോബോട്ട് ആം തുടർച്ചയായി ഒരു പച്ച വസ്തുവിനായി പരിശോധിക്കും.

ലാബ് 5 പ്ലേ പാർട്ട് 2 സൊല്യൂഷൻ
ഈ പ്രോജക്റ്റ് റോബോട്ട് കൈ നിർമ്മിക്കും:
- ഐ സെൻസർ ഒരു വസ്തു കണ്ടെത്തുന്നതുവരെ കാത്തിരിക്കുക.
- പച്ച നിറത്തിലുള്ള വസ്തുവാണെങ്കിൽ, റോബോട്ട് ആം ഡിസ്ക് ഉയർത്തി 90 ഡിഗ്രി വലത്തേക്ക് നീക്കും, തുടർന്ന് ഡിസ്ക് താഴ്ത്തി അതിന്റെ ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങും.
- വസ്തു ചുവപ്പാണെങ്കിൽ, റോബോട്ട് ആം ഡിസ്ക് ഉയർത്തി 180 ഡിഗ്രി വലത്തേക്ക് നീക്കും, തുടർന്ന് ഡിസ്ക് താഴ്ത്തി അതിന്റെ ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങും.
- വസ്തു നീല നിറത്തിലാണെങ്കിൽ, റോബോട്ട് ആം ഡിസ്ക് ഉയർത്തി 90 ഡിഗ്രി ഇടത്തേക്ക് നീക്കും, തുടർന്ന് ഡിസ്ക് താഴ്ത്തി അതിന്റെ ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങും.

ഐ സെൻസറിൽ നിന്നുള്ള ഡാറ്റയെ അടിസ്ഥാനമാക്കി റോബോട്ടിന് ആവർത്തിച്ച് തീരുമാനങ്ങൾ എടുക്കാൻ പ്രാപ്തമാക്കുന്നതിന് ഈ പ്രോജക്ടുകൾ കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ ചേർക്കുന്നു. [Forever] ബ്ലോക്ക് ഉപയോഗിച്ച് റോബോട്ടിനോട് വസ്തുക്കൾക്കായി തുടർച്ചയായി പരിശോധിക്കാൻ പറയുന്നതിനാലാണ് അവ ആവർത്തിക്കുന്നത്.
ഈ പ്രോജക്റ്റുകളിൽ ഉപയോഗിക്കുന്ന വ്യക്തിഗത ബ്ലോക്കുകളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEXcode GO-യിലെ സഹായ സവിശേഷത ഉപയോഗിക്കുക. ബ്ലോക്ക് ആകൃതികളെയും അവയുടെ അർത്ഥങ്ങളെയും കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEX ലൈബ്രറിയിലെ ബ്ലോക്ക് ആകൃതികളും അർത്ഥങ്ങളും എന്ന ലേഖനം കാണുക. ഈ കോഡ് സൊല്യൂഷനുകൾക്ക് പിന്നിലെ കമ്പ്യൂട്ടർ സയൻസ് ആശയങ്ങളെക്കുറിച്ച് കൂടുതലറിയാൻ നിങ്ങൾ ആഗ്രഹിക്കുന്നുവെങ്കിൽ, കമ്പ്യൂട്ടർ സയൻസ് ഫണ്ടമെന്റൽസ് എഡ്യൂക്കേറ്റർ സർട്ടിഫിക്കേഷൻ കോഴ്സ് നിങ്ങൾക്കുള്ളതായിരിക്കാം.
പ്രോജക്ട് ഫ്ലോ എന്താണ്?
ഒരു പ്രോജക്റ്റിൽ ബ്ലോക്കുകൾ നടപ്പിലാക്കുന്ന ക്രമത്തെയാണ് പ്രോജക്റ്റ് ഫ്ലോ വിവരിക്കുന്നത്. എല്ലാ പ്രോജക്റ്റുകളും മുകളിൽ നിന്ന് താഴേക്ക് ഒഴുകുന്നു, [ആരംഭിച്ചപ്പോൾ] ഹാറ്റ് ബ്ലോക്കിൽ നിന്ന് ആരംഭിക്കുന്നു. ഒരു സമയം ഒരു ബ്ലോക്ക് മാത്രമേ നടപ്പിലാക്കുകയുള്ളൂ, ഒരു ബ്ലോക്ക് അതിന്റെ പ്രവർത്തനങ്ങൾ അല്ലെങ്കിൽ പെരുമാറ്റങ്ങൾ പൂർത്തിയാക്കിക്കഴിഞ്ഞാൽ, പ്രോജക്റ്റ് അടുത്ത ബ്ലോക്കിലേക്ക് യാന്ത്രികമായി നീങ്ങുന്നു. ചില കൺട്രോൾ ബ്ലോക്കുകൾക്ക് (ഓറഞ്ച് നിറത്തിലുള്ളത്) ഒരു അവസ്ഥയെയോ പാരാമീറ്റർ മൂല്യത്തെയോ അടിസ്ഥാനമാക്കി പ്രോജക്റ്റ് ഫ്ലോ പരിഷ്കരിക്കാൻ കഴിയും. ഉദാഹരണത്തിന്, ഈ പ്രോജക്റ്റിൽ, [Wait until] ബ്ലോക്ക് പ്രോജക്റ്റിന്റെ ഒഴുക്ക് നിർത്തുകയും, (ഈ സാഹചര്യത്തിൽ, ഐ സെൻസർ ഒരു വസ്തു കണ്ടെത്തിയോ) എന്ന അവസ്ഥ പാലിക്കുന്നതുവരെ കാത്തിരിക്കുകയും ചെയ്യും. ആ നിബന്ധന പാലിച്ചുകഴിഞ്ഞാൽ (ഐ സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തി, അങ്ങനെ ബ്ലോക്ക് TRUE മൂല്യം റിപ്പോർട്ട് ചെയ്യുന്നു), [വരെ കാത്തിരിക്കുക] ബ്ലോക്ക് അവസാനിച്ച് പ്രോജക്റ്റിലെ അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങും.
VEX GO പീസുകൾ
റോബോട്ട് ആം യൂണിറ്റിൽ ഉപയോഗിക്കുന്ന VEX GO കിറ്റ് പീസുകളെയും ഇലക്ട്രോണിക്സുകളെയും കുറിച്ചുള്ള കൂടുതൽ വിശദമായ വിവരങ്ങൾക്ക്, VEX GO കിറ്റ് VEX ലൈബ്രറി ആർട്ടിക്കിളിലെ പീസുകൾ കാണുക.