
Hintergrund
In dieser Einheit erkunden die Schüler die Entwicklung eines Roboterarms vom manuellen zum motorisierten und zum automatisierten Arm und wie er gesteuert werden kann, um eine Aufgabe manuell, mit Schaltern und mithilfe von Code auszuführen. Während der gesamten Einheit haben die Studierenden die Möglichkeit, über Konzepte im Zusammenhang mit Mechanisierung, Automatisierung, Projektablauf und bedingten Anweisungen nachzudenken und zu diskutieren und Verbindungen zwischen menschlichen und robotischen Prozessen herzustellen.
Builds und Funktionen in dieser Einheit
Es gibt vier Builds in dieser Einheit:
- Ein manueller Roboterarm
- Ein motorisierter Roboterarm
- Ein Code-Roboterarm, der sich auf einer Achse bewegt
- Ein Code-Roboterarm, der sich auf 2 Achsen bewegt
Diese Builds können einzeln (für jedes Lab von Grund auf neu erstellt) oder als Übergangsbuilds (der erste Build wird in nachfolgenden Labs geändert) abgeschlossen werden. Zu den Hauptmerkmalen jedes Builds gehören:
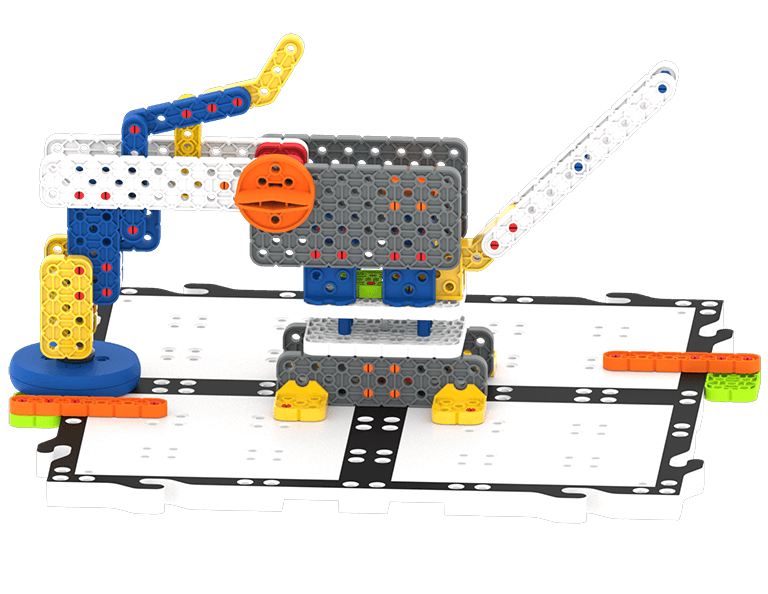
Roboterarm: Ein manuell betriebener Roboterarm, der durch Bewegen des langen weißen Balkens gesteuert wird, um ihn von einer Seite auf die andere zu drehen, oder durch Bewegen des Arms auf und ab mit den orangefarbenen Knöpfen. Bei dieser Konstruktion wird ein Nord-Süd-Magnet zum Anheben der Scheiben verwendet.
Motorisierter Roboterarm: Ein Roboterarm, der verwendet Motoren Und Schalter bewegen. Die Motoren und Schalter sind an eine Batterie angeschlossen. Dieser Aufbau verwendet auch einen Nord-Süd-Magneten zum Anheben der Scheiben.
- Hinweis: Für diesen Build sind 2 GO-Kits erforderlich, um 1 Roboterarm fertigzustellen.
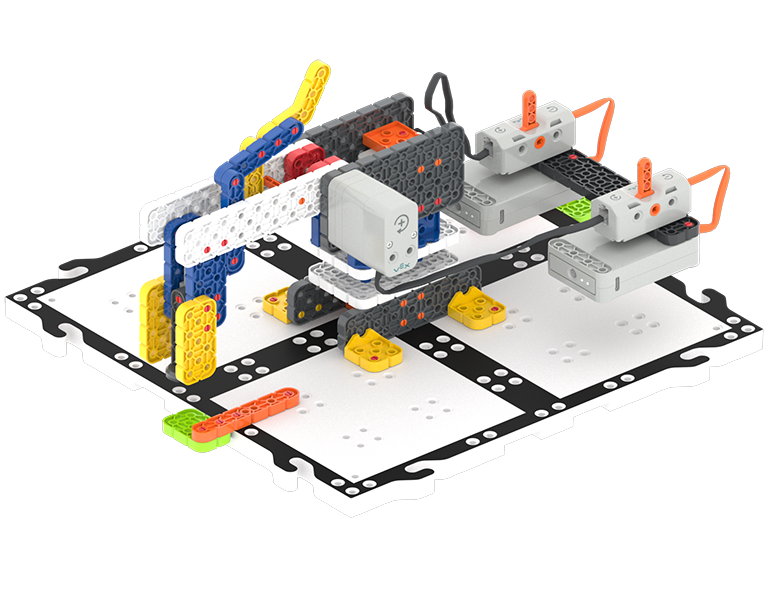
Code-Roboterarm (1-Achsen): Ein Roboterarm mit Motoren und a Gehirn das mit VEXcode GO gesteuert wird, um sich auf 1 zu bewegen Achse - Seite an Seite. Dieser Build fügt eine hinzuAugensensor, und verwendet eine Elektromagnet um die Scheiben anzuheben.
Code-Roboterarm (2-Achsen): Der endgültige Roboterarmbau, der einen Motor hinzufügt, um den Arm auf einer zweiten Achse anzuheben – nach oben und unten. Dieser Aufbau verwendet weiterhin den Augensensor und den Elektromagneten, um die Scheiben anzuheben.
Roboterarme im echten Leben
Ein Roboterarm ist eine Art mechanischer Arm, der normalerweise programmierbar ist und ähnlich wie ein menschlicher Arm funktioniert.

Roboterarme, die sich in verschiedene Richtungen bewegen können, können für die Ausführung vieler verschiedener Aufgaben programmiert werden. Zu diesen Aufgaben gehören unter anderem das Schweißen von Metall, die Bearbeitung von Maschinen, das Lackieren, das Zusammenbauen von Dingen, das Einsetzen von Dingen in andere Maschinen und das Sortieren von Objekten. Diese Roboter erledigen oft langweilige, schmutzige und gefährliche Arbeiten, damit sie nicht von Menschen ausgeführt werden müssen.

Roboterarme können mit jeder Art von Werkzeug ausgestattet werden. Der Einsatz dieser Werkzeuge erfolgt mit einer Präzision, Genauigkeit, Geschwindigkeit und Wiederholbarkeit, die der Mensch nicht erreichen kann. In dieser MINT-Laboreinheit statten die Schüler ihren Roboterarm mit einem Magneten und später mit einem Elektromagneten aus.
Diese Roboterarme können Sensoren und Sensorinformationen nutzen, um Entscheidungen über ihr Verhalten zu treffen. In den späteren Laborübungen der Einheit erkunden die Schüler, wie der Augensensor funktioniert und wie er zur Steuerung der Bewegung des Roboterarms verwendet werden kann.
Industrieroboter und Automatisierung sind ein wichtiger Bestandteil der Herstellung der meisten Produkte, die heute weltweit hergestellt werden. Als ergänzende Aktivität können Sie die Schüler zum Thema Industrieroboter recherchieren und eine Liste der von ihnen verwendeten Produkte erstellen, die von einem Roboterarm hergestellt oder sortiert wurden.
Erläuterung der Laborlösungen
In den Übungen 3–5 verwenden die Schüler VEXcode GO, um Projekte zu erstellen, die die Bewegung des Roboterarms mithilfe von Elektromagnet, Augensensor, Motoren und Gehirn steuern. Labor 3 führt in die grundlegende Programmierung ein, um den Elektromagneten mit Energie zu versorgen und den Roboterarm zu drehen. In den Übungen 4 und 5 wird untersucht, wie der Roboterarm durch Entscheidungsfindung im Code gesteuert werden kann. Außerdem wird der Projektablauf mithilfe von Booleschen Bedingungen, bedingten Anweisungen und dem Block [Forever] untersucht, um Scheiben zu bewegen und Entscheidungen auf der Grundlage der Farberkennung zu treffen.
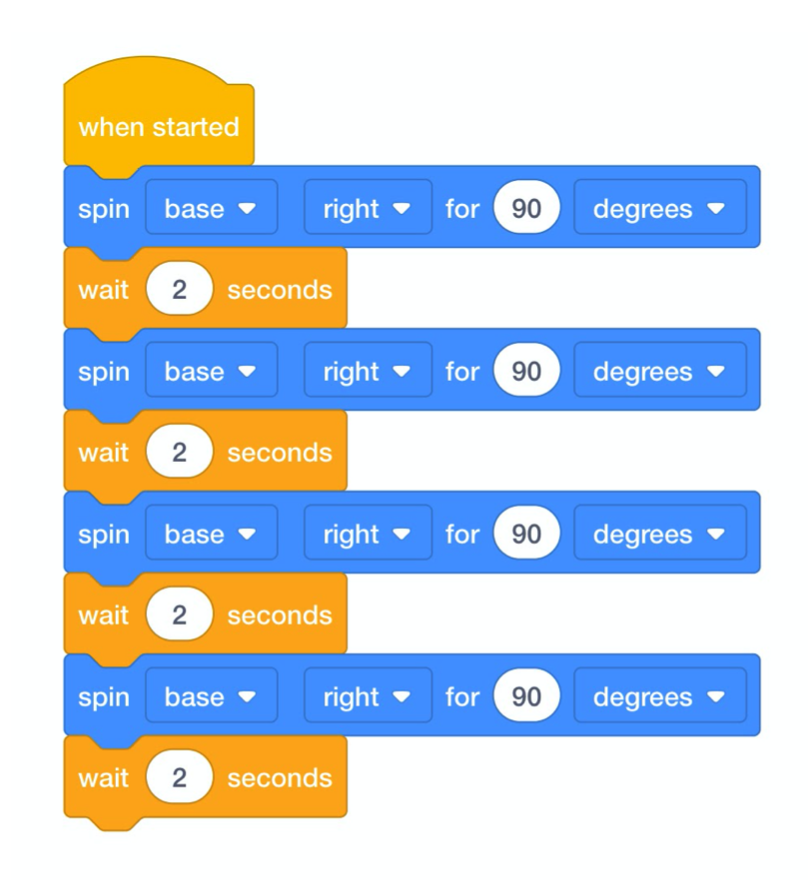
Lösung für Lab 3 Play Teil 1
Dieses Projekt wird den Roboterarm herstellen:
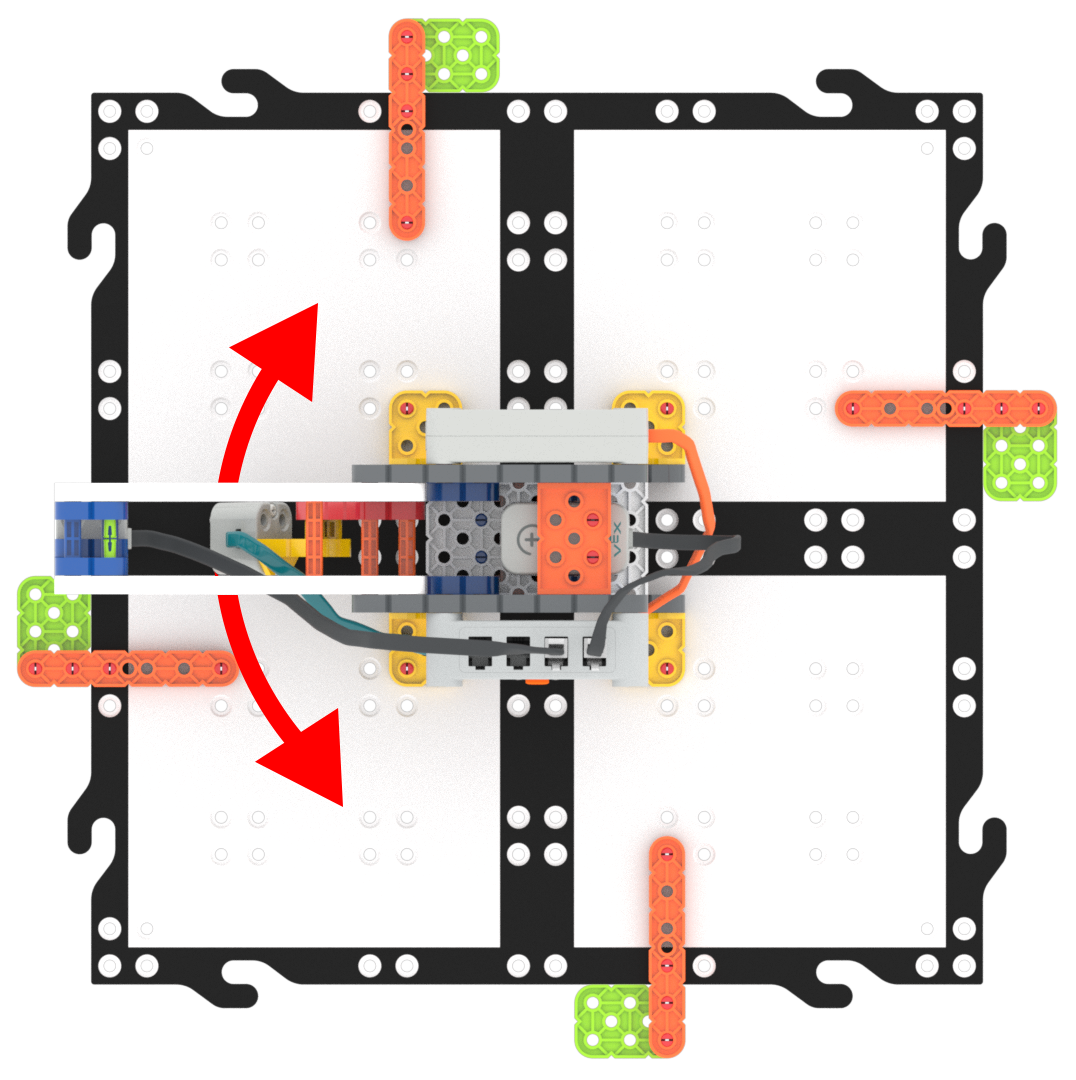
- Drehen Sie den Roboterarm nach rechts (um 90 Grad).
- Warten Sie dann 2 Sekunden.
- Wiederholen Sie diesen Vorgang dann noch dreimal, um den Roboterarm vollständig umzudrehen und ihn in seine Ausgangsposition zurückzubringen.
Lösung für Lab 3 Play Teil 2
Dieses Projekt wird den Roboterarm herstellen:
- Aktivieren Sie den Elektromagneten, um die Scheibe aufzunehmen.
- Drehen Sie dann den Roboterarm nach rechts, um die Scheibe zu bewegen.
- Legen Sie die Diskette an einem neuen Speicherort ab.
- Bringen Sie den Roboterarm in seine Ausgangsposition zurück.
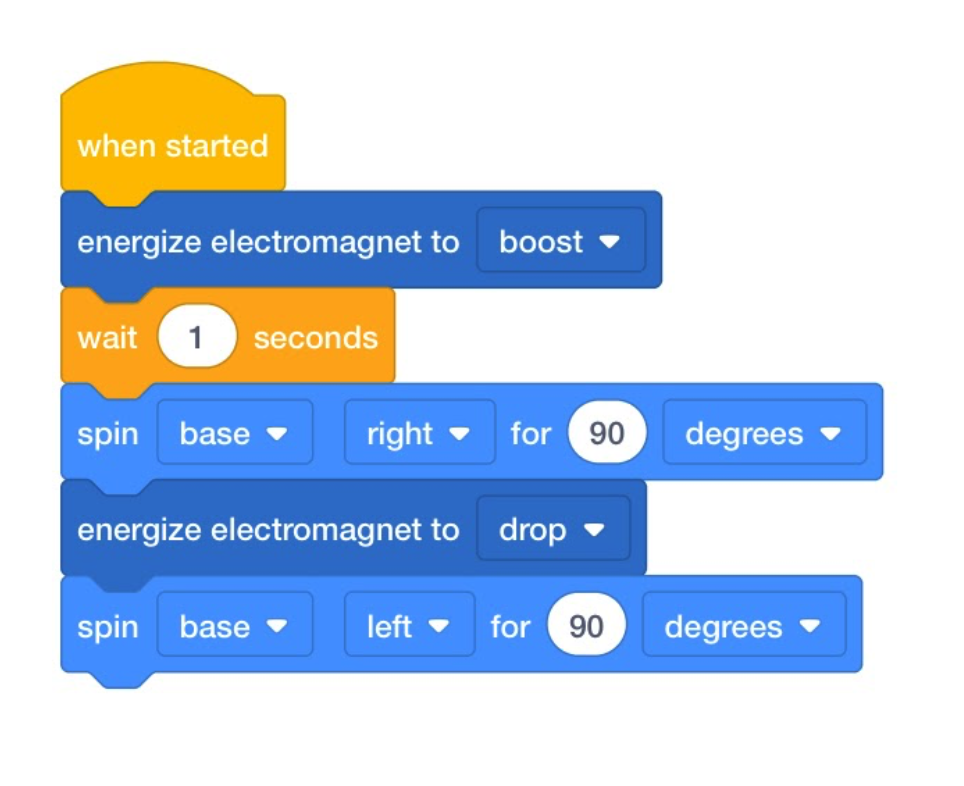
Hinweis: In diesem Szenario trifft die Scheibe den orangefarbenen Strahl auf der Kachel und sollte vom Magneten getrennt werden. Dies ist das beabsichtigte Verhalten.
Lösung für Lab 4 Play Teil 1
Dieses Projekt wird den Roboterarm herstellen:
- Warten Sie, bis der Augensensor ein Objekt gefunden hat.
- Aktivieren Sie dann den Elektromagneten, um die Scheibe aufzunehmen.
- Drehen Sie dann den Roboterarm nach rechts, um den Dis zu bewegen
- Legen Sie die Diskette an einem neuen Speicherort ab.
- Bringen Sie den Roboterarm in seine Ausgangsposition zurück.
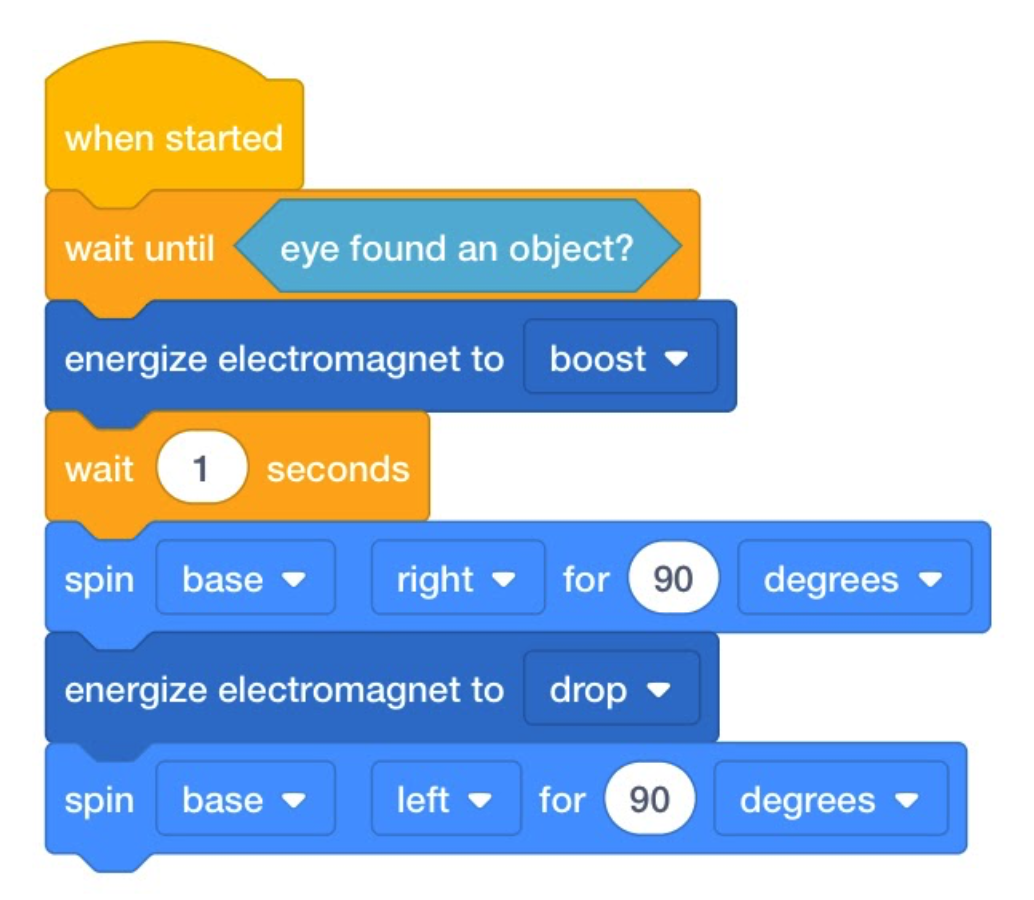
Hinweis: In diesem Szenario trifft die Scheibe den orangefarbenen Strahl auf der Kachel und sollte vom Magneten getrennt werden. Dies ist das beabsichtigte Verhalten.
Lösung für Lab 4 Play Teil 2
Dieses Projekt wird den Roboterarm herstellen:
- Warten Sie, bis der Augensensor ein Objekt gefunden hat.
- Aktivieren Sie dann den Elektromagneten, um die Scheibe aufzunehmen.
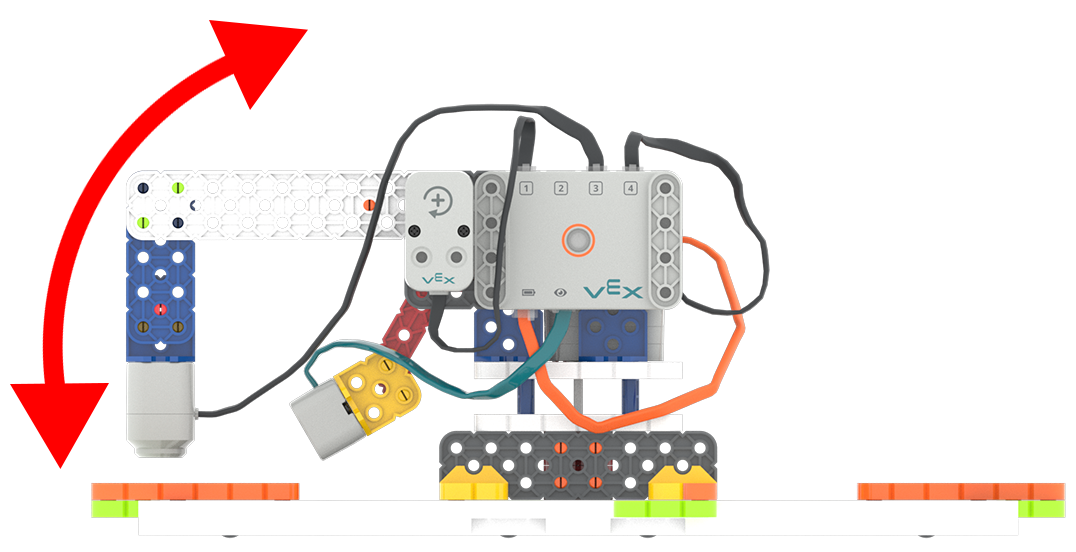
- Bewegen Sie dann den Roboterarm nach OBEN, um die Scheibe anzuheben.
- Drehen Sie dann den Roboterarm nach rechts, um die Scheibe zu bewegen.
- Bewegen Sie dann den Roboterarm nach UNTEN, damit er die Diskette fallen lassen kann.
- Bringen Sie den Roboterarm in seine Ausgangsposition zurück.
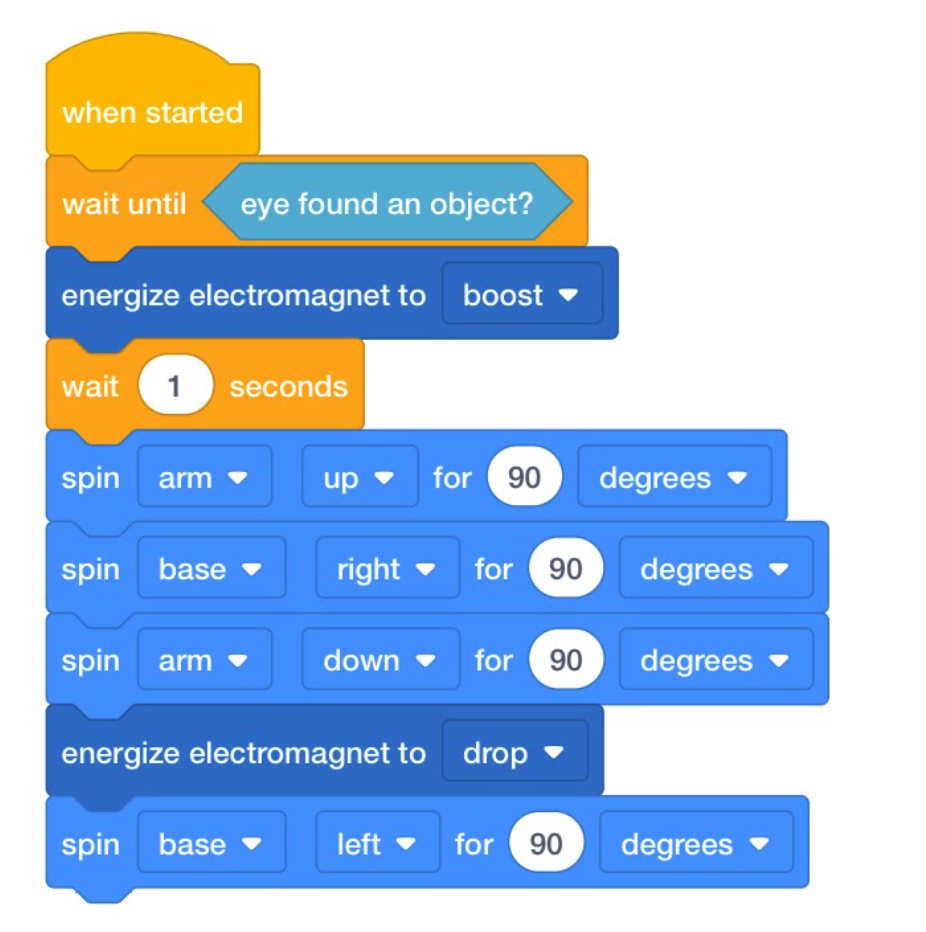
Diese Projekte verwenden den Block [Warten bis], um den Ablauf des Projekts zu steuern und zu warten, bis der Augensensor ein Objekt erkennt, bevor er den Elektromagneten aktiviert. Wenn nicht auf den Augensensor gewartet würde, würde sich der Elektromagnet bewegen, ohne die Scheibe aufzunehmen. Dadurch kann der Roboter eine Entscheidung auf Grundlage der Daten treffen, die er von seinem Augensensor erhält.
Lösung für Lab 5 Play Teil 1
Dieses Projekt wird den Roboterarm herstellen:
- Warten Sie, bis der Augensensor ein Objekt gefunden hat.
- Wenn das Objekt grün ist, wird die Scheibe bewegt, wie in Übung 4.
- Der Roboterarm sucht aufgrund des [Für immer]-Blocks um den Stapel ständig nach einem grünen Objekt.
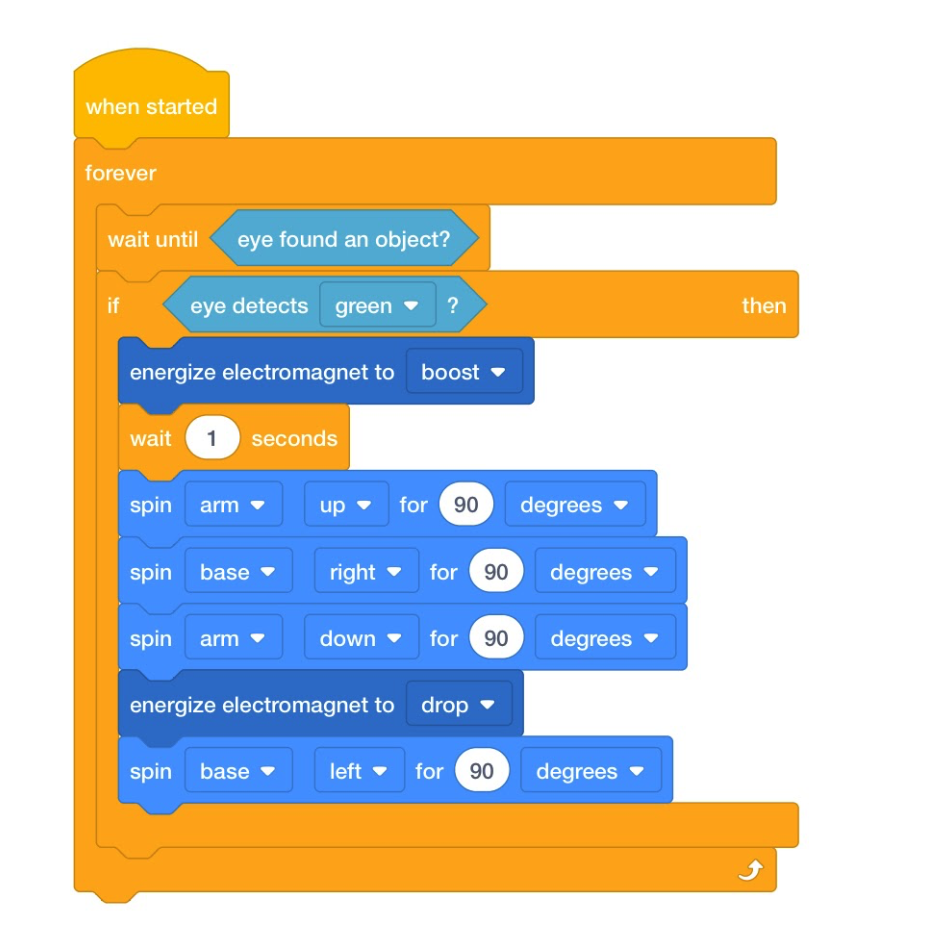
Lösung für Lab 5 Play Teil 2
Dieses Projekt wird den Roboterarm herstellen:
- Warten Sie, bis der Augensensor ein Objekt gefunden hat.
- Wenn das Objekt grün ist, hebt der Roboterarm die Scheibe an, bewegt sie um 90 Grad nach rechts, lässt die Scheibe anschließend fallen und kehrt in ihre Ausgangsposition zurück.
- Wenn das Objekt rot ist, hebt der Roboterarm die Scheibe an, bewegt sie um 180 Grad nach rechts und lässt sie anschließend fallen, bevor sie in ihre Ausgangsposition zurückkehrt.
- Wenn das Objekt blau ist, hebt der Roboterarm die Scheibe an, bewegt sie um 90 Grad nach links, lässt sie anschließend fallen und kehrt in ihre Ausgangsposition zurück.
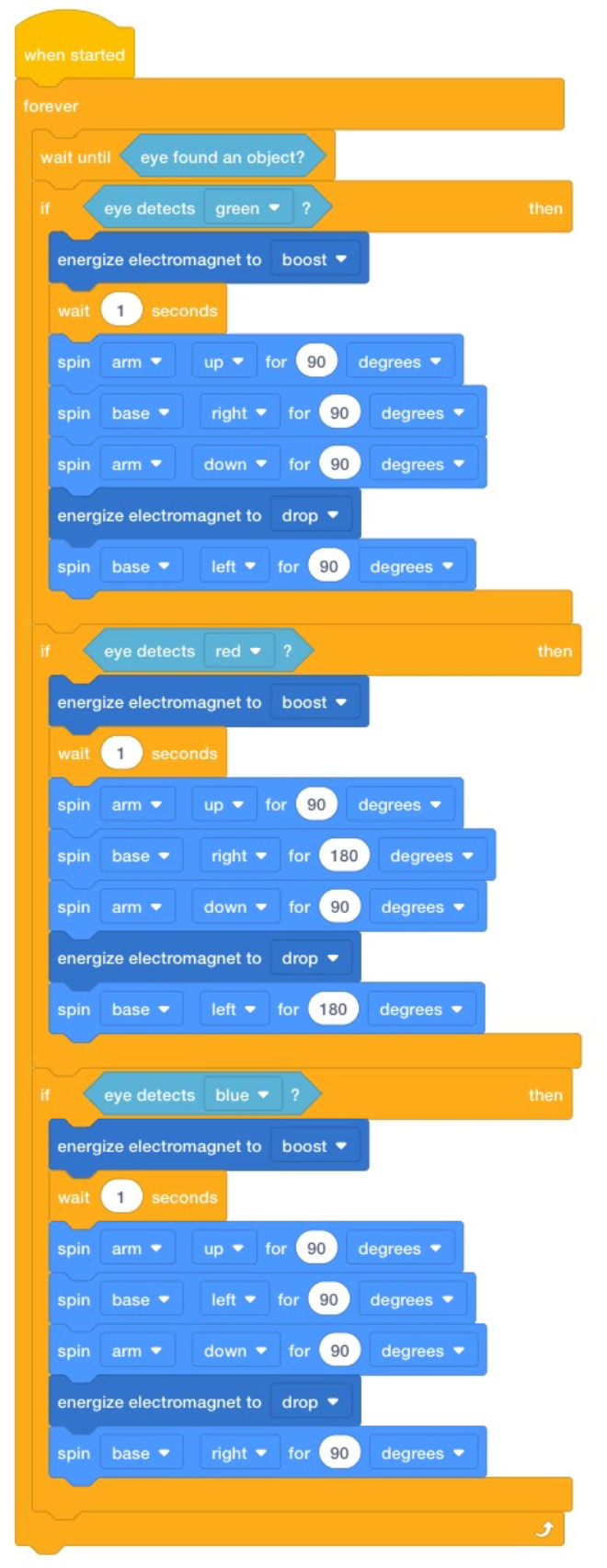
Diese Projekte fügen bedingte Anweisungen hinzu, die es dem Roboter ermöglichen, wiederholte Entscheidungen basierend auf den Daten des Augensensors zu treffen. Sie werden wiederholt, weil der Block [Für immer] verwendet wird, um dem Roboter mitzuteilen, dass er kontinuierlich nach Objekten suchen soll.
Weitere Informationen zu den einzelnen Bausteinen, die in diesen Projekten verwendet werden, finden Sie unter Helfen Besonderheit in VEXcode GO. Weitere Informationen zu Blockformen und ihrer Bedeutung finden Sie imBlock Formen und Bedeutungen Artikel in der VEX-Bibliothek. Wenn Sie mehr darüber erfahren möchten Informatikkonzepte hinter diesen Codelösungen, die Grundlagen der Informatik Zertifizierungskurs für Pädagogen könnte für dich sein.
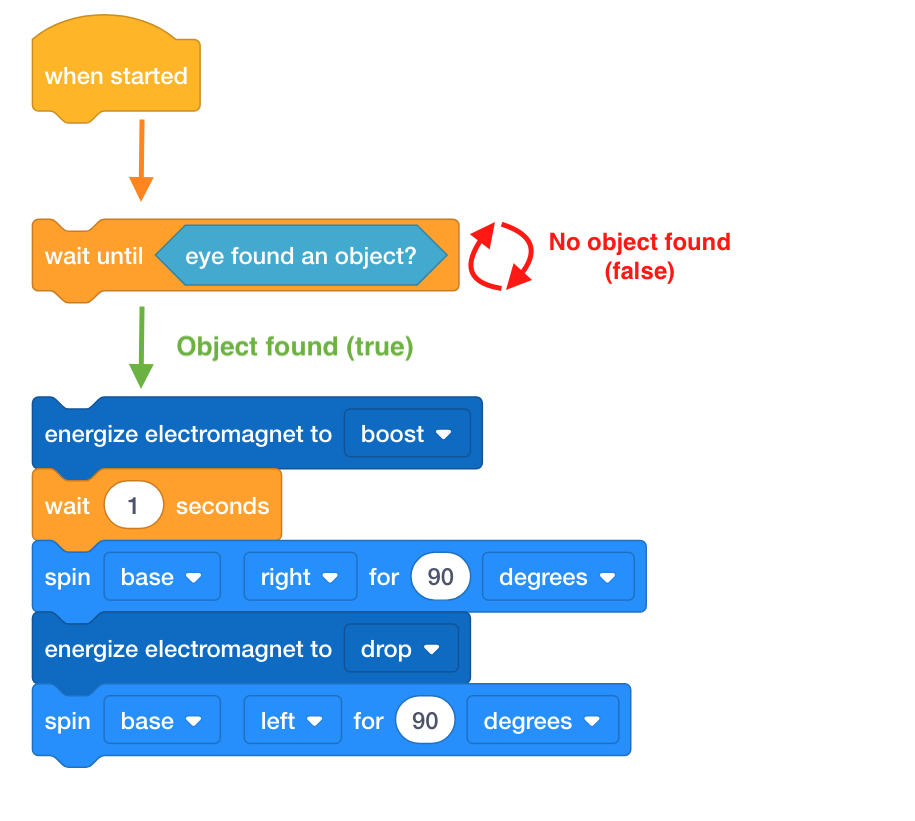
Was ist Projektfluss?
Der Projektfluss beschreibt die Reihenfolge, in der Blöcke in einem Projekt ausgeführt werden. Alle Projekte verlaufen von oben nach unten, beginnend mit dem Hutblock [Beim Start]. Es wird immer nur ein Block ausgeführt und sobald ein Block seine Aktionen oder Verhaltensweisen abgeschlossen hat, fährt das Projekt automatisch mit dem nächsten Block fort. Bestimmte Steuerblöcke (orange) können den Projektablauf basierend auf einer Bedingung oder einem Parameterwert ändern. In diesem Projekt beispielsweise stoppt der Block [Warten bis] den Projektfluss und „wartet, bis“ die Bedingung (in diesem Fall, ob der Augensensor ein Objekt gefunden hat) erfüllt ist. Sobald diese Bedingung erfüllt ist (der Augensensor hat ein Objekt gefunden, sodass der Block den Wert TRUE meldet), wird der Block [Warten bis] beendet und mit dem nächsten Block im Projekt fortgefahren.
VEX GO-Teile
Ausführlichere Informationen zu den VEX GO Kit-Teilen und der Elektronik, die in der Roboterarmeinheit verwendet werden, finden Sie unter DieStücke In das VEX GO Kit Artikel der VEX-Bibliothek.