
Sfondo
In questa unità, gli studenti esploreranno l'evoluzione di un braccio robotico da manuale a motorizzato ad automatizzato e come può essere controllato per svolgere un compito manualmente, con interruttori e utilizzando un codice. Nel corso dell'unità gli studenti avranno l'opportunità di riflettere e discutere concetti relativi alla meccanizzazione, all'automazione, al flusso di progetto e alle istruzioni condizionali, nonché di stabilire collegamenti tra processi umani e robotici.
Build e caratteristiche di questa unità
Ci sono quattro build in questa unità:
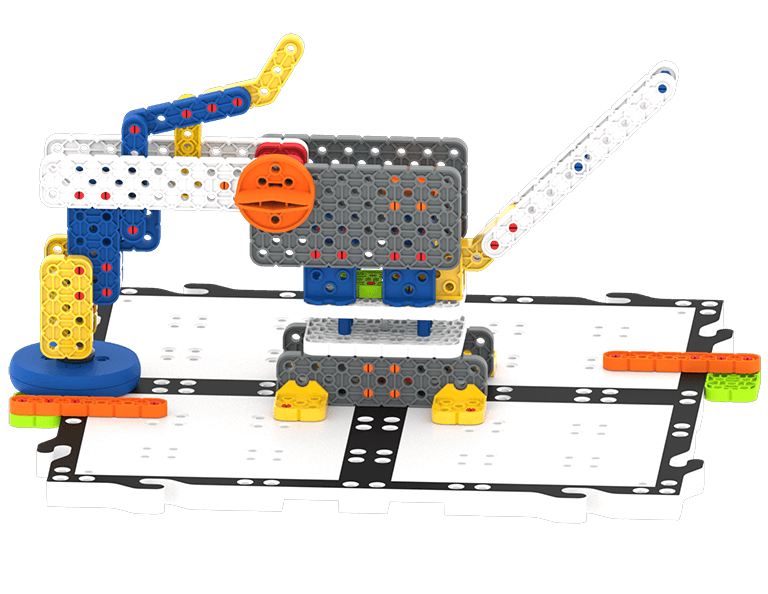
- Un braccio robotico manuale
- Un braccio robotico motorizzato
- Un braccio robotico in codice che si muove su 1 asse
- Un braccio robotico di codice che si muove su 2 assi
Queste build possono essere completate individualmente (create da zero per ogni Lab) oppure come build di transizione (la prima build viene modificata nei Lab successivi). Le caratteristiche principali di ogni build includono:
Braccio robotico: Un braccio robotico azionato manualmente che viene controllato muovendo la lunga trave bianca per ruotarla da un lato all'altro, oppure le manopole arancioni per muovere il braccio su e giù. Questa configurazione utilizza un magnete Nord-Sud per sollevare i dischi.
Braccio robotico motorizzato: Un braccio robotico che utilizza motori E interruttori muoversi. I motori e gli interruttori sono collegati a una batteria. Anche questa configurazione utilizza un magnete Nord-Sud per sollevare i dischi.
- Nota: Questa build richiede 2 kit GO per completare 1 braccio robotico.
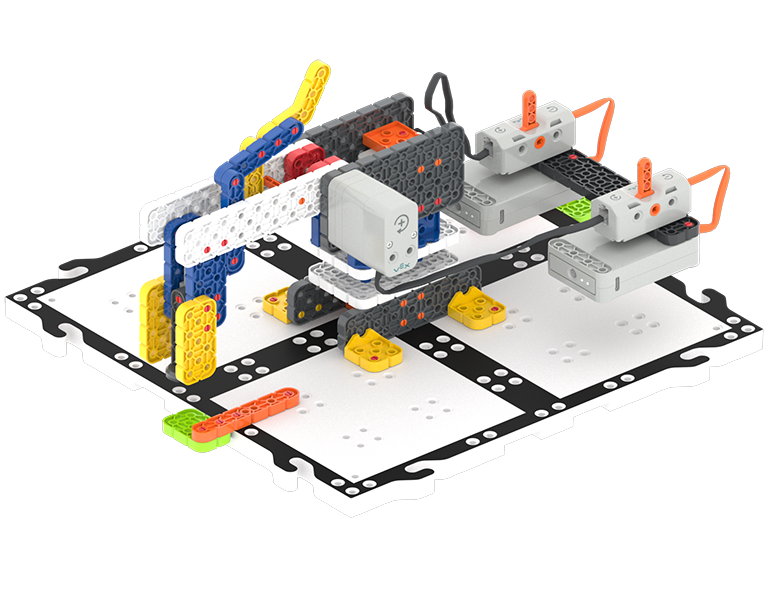
Codice Braccio robotico (1 asse): Un braccio robotico con motori e aCervello che è controllato utilizzando VEXcode GO per andare avanti 1 Asse: da un lato all'altro. Questa build aggiunge unEye Sensor, e utilizza un Electromagnet per sollevare i dischi.
Codice Braccio Robotico (2 assi): L'ultima versione del braccio robotico che aggiunge un motore per sollevare il braccio su un secondo asse, verso l'alto e verso il basso. Questa build continua a utilizzare il sensore oculare e l'elettromagnete per sollevare i dischi.
Braccia robotiche nella vita reale
Un braccio robotico è un tipo di braccio meccanico, solitamente programmabile, che funziona in modo simile al braccio umano.

I bracci robotici, che possono muoversi in diverse direzioni, possono essere programmati per svolgere molti compiti diversi. Alcune di queste attività includono la saldatura dei metalli, la lavorazione meccanica, la verniciatura, l'assemblaggio di oggetti, il posizionamento di oggetti in altre macchine e la selezione di oggetti. Questi robot spesso svolgono lavori noiosi, sporchi e pericolosi, in modo che le persone non debbano farli.

I bracci robotici possono essere equipaggiati con qualsiasi tipo di utensile. Questi strumenti vengono utilizzati con una precisione, un'accuratezza, una velocità e una ripetitività che non possono essere eguagliate dagli esseri umani. In questa unità di laboratorio STEM, gli studenti equipaggeranno il loro braccio robotico con un magnete e, in seguito, con un elettromagnete.
Questi bracci robotici possono utilizzare sensori e informazioni provenienti da essi per prendere decisioni sui loro comportamenti. Nei laboratori successivi dell'unità, gli studenti esploreranno il funzionamento del sensore oculare e come può essere utilizzato per controllare il movimento del braccio robotico.
I robot industriali e l'automazione svolgono un ruolo importante nella fabbricazione della maggior parte dei prodotti realizzati nel mondo odierno. Come attività di approfondimento, chiedete agli studenti di fare delle ricerche sui robot industriali e di stilare un elenco dei prodotti che utilizzano e che sono stati realizzati o selezionati da un braccio robotico.
Soluzioni di laboratorio spiegate
Nei laboratori da 3 a 5, gli studenti utilizzeranno VEXcode GO per creare progetti che controllano il movimento del braccio robotico utilizzando l'elettromagnete, il sensore oculare, i motori e il cervello. Il laboratorio 3 introduce la programmazione di base per energizzare l'elettromagnete e far girare il braccio robotico. Nei laboratori 4 e 5 verrà illustrato come controllare il braccio robotico tramite decisioni prese nel codice, e verrà analizzato il flusso del progetto utilizzando condizioni booleane, istruzioni condizionali e il blocco [Forever] per spostare i dischi e prendere decisioni in base al rilevamento del colore.
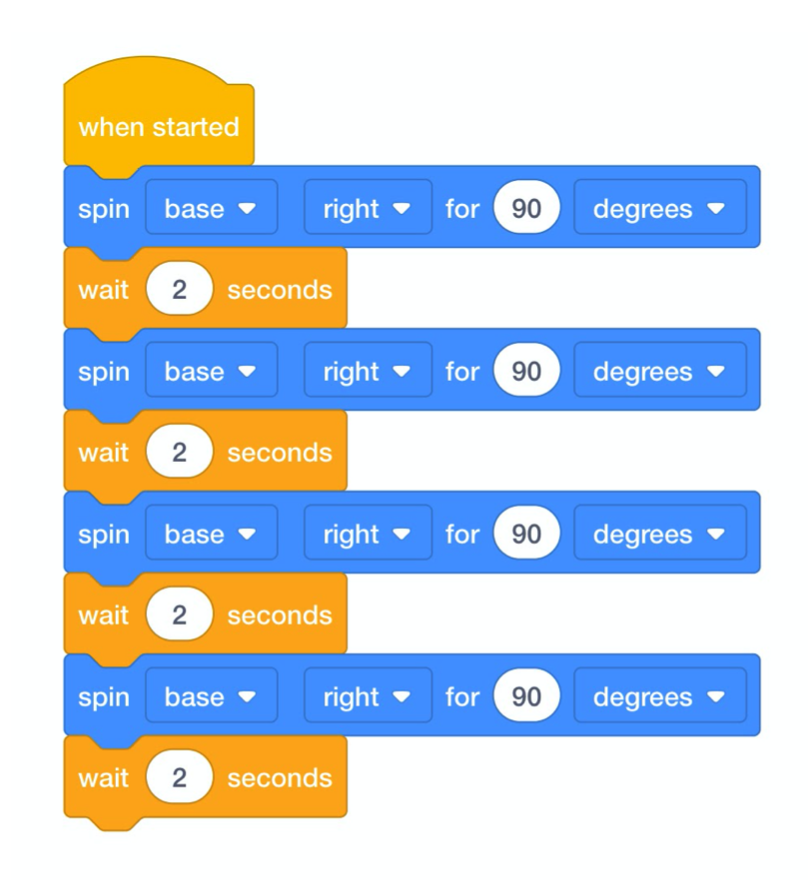
Soluzione Lab 3 Play Parte 1
Questo progetto renderà il braccio robotico:
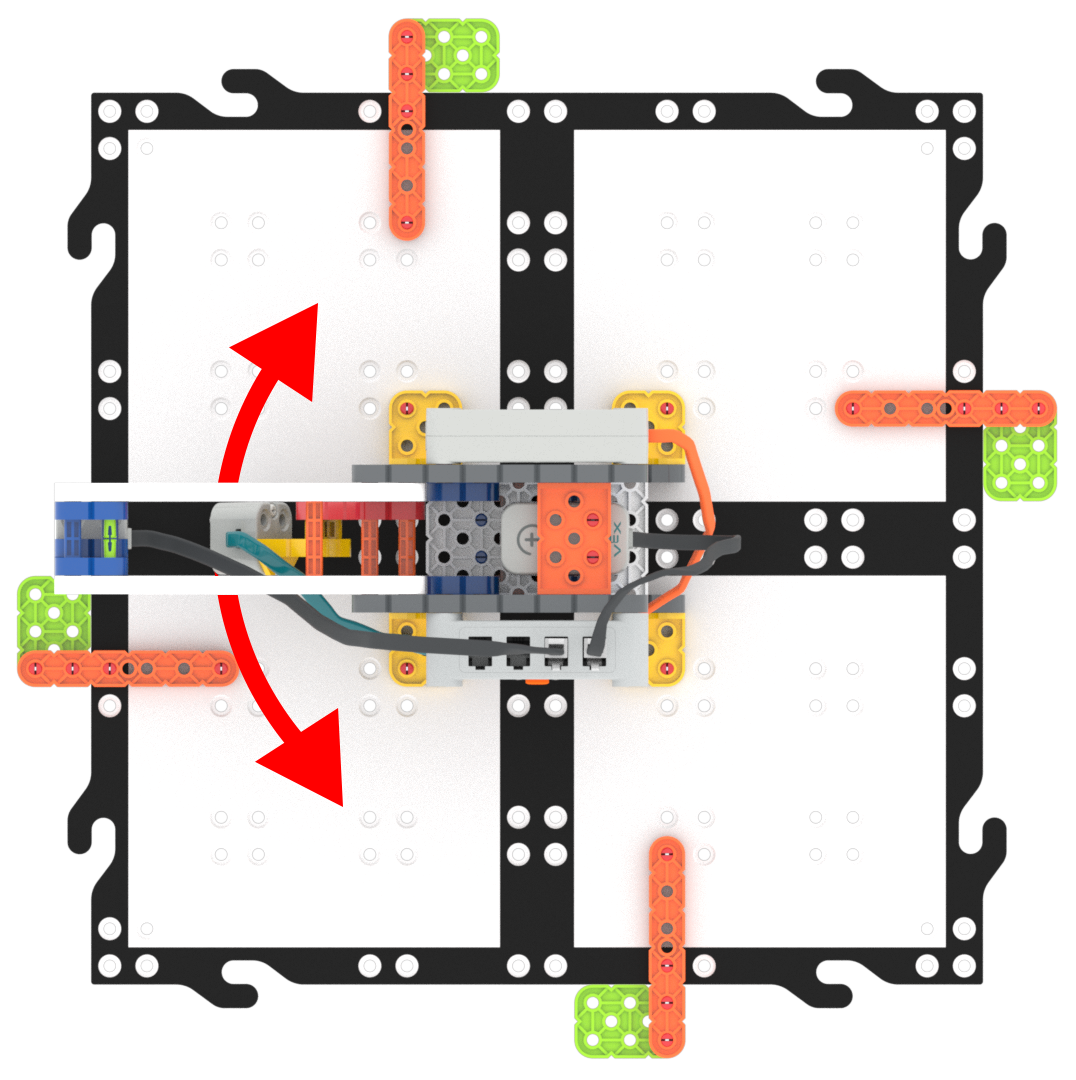
- Ruotare il braccio robotico verso destra (di 90 gradi).
- Quindi, attendere 2 secondi.
- Quindi, ripetere il procedimento altre 3 volte, per girare completamente il braccio robotico e riportarlo nella posizione iniziale.
Soluzione Lab 3 Play Parte 2
Questo progetto renderà il braccio robotico:
- Azionare l'elettromagnete per sollevare il disco.
- Quindi, ruota il braccio robotico verso destra per spostare il disco.
- Rilasciare il disco in una nuova posizione.
- Riportare il braccio robotico nella posizione iniziale.
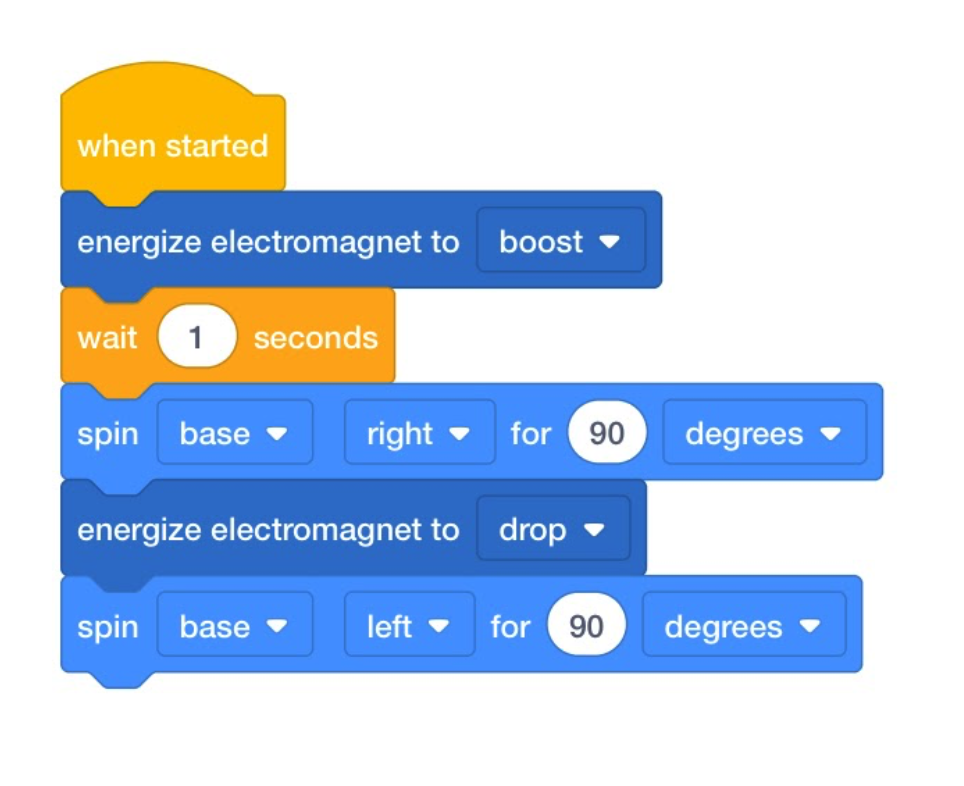
Nota: In questo scenario, il disco colpirà il raggio arancione sulla piastrella e dovrebbe separarsi dal magnete. Questo è il comportamento previsto.
Soluzione Lab 4 Play Parte 1
Questo progetto renderà il braccio robotico:
- Attendi che il sensore oculare rilevi un oggetto.
- Quindi, energizza l'elettromagnete per sollevare il disco.
- Quindi, ruota il braccio robotico verso destra per muovere il disco
- Rilasciare il disco in una nuova posizione.
- Riportare il braccio robotico nella posizione iniziale.
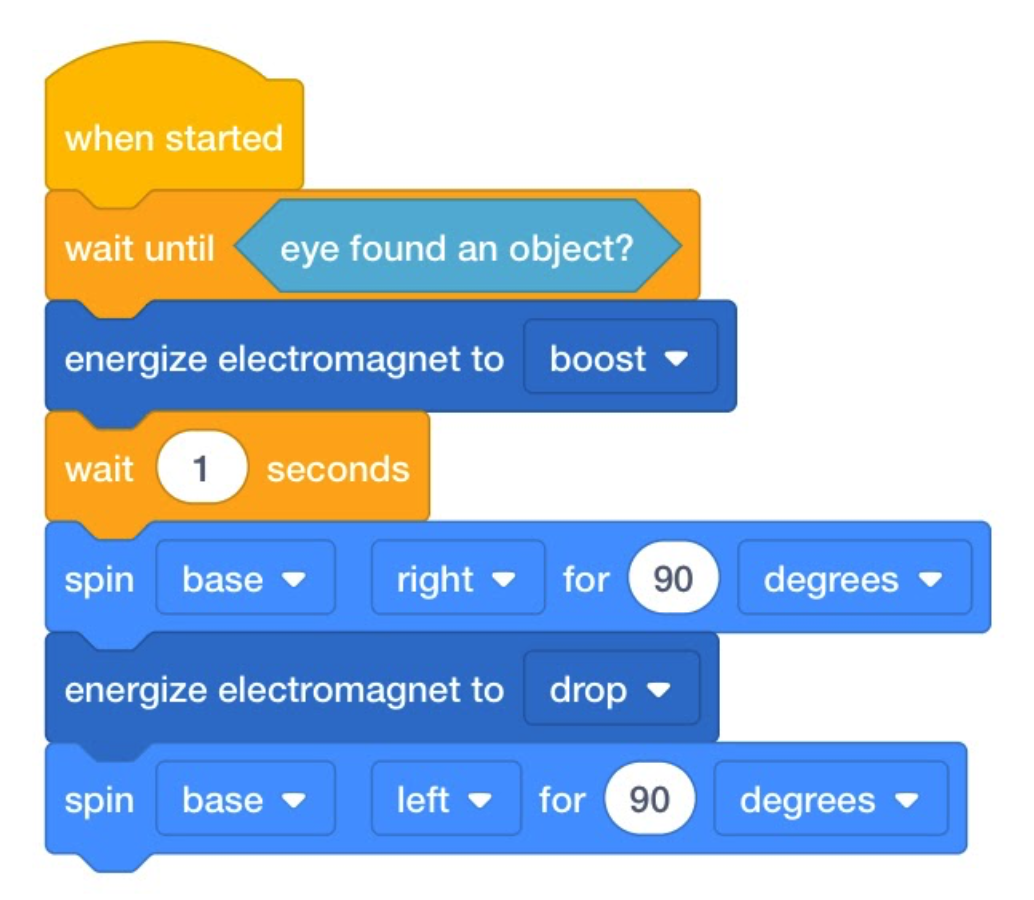
Nota: In questo scenario, il disco colpirà il raggio arancione sulla piastrella e dovrebbe separarsi dal magnete. Questo è il comportamento previsto.
Soluzione Lab 4 Play Parte 2
Questo progetto renderà il braccio robotico:
- Attendi che il sensore oculare rilevi un oggetto.
- Quindi, energizza l'elettromagnete per sollevare il disco.
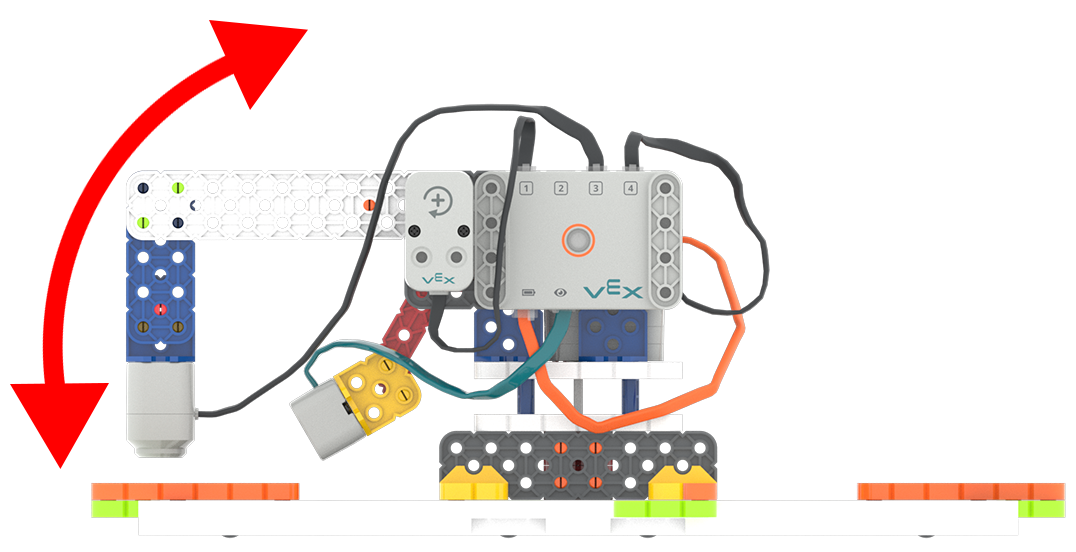
- Quindi, spostare il braccio robotico VERSO L'ALTO per sollevare il disco.
- Quindi, ruota il braccio robotico verso destra per spostare il disco.
- Quindi, muovi il braccio robotico verso il BASSO in modo che possa far cadere il disco.
- Riportare il braccio robotico nella posizione iniziale.
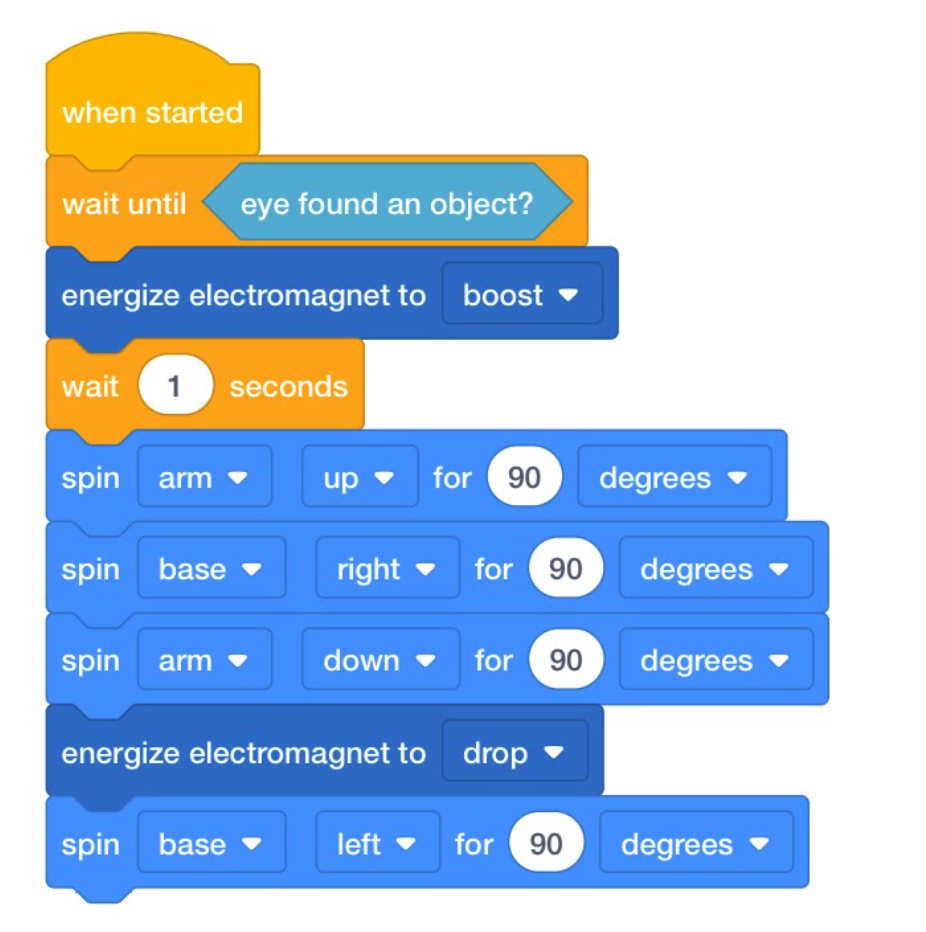
Questi progetti utilizzano il blocco [Attendi fino a] per controllare il flusso del progetto in modo che il sensore oculare rilevi un oggetto prima di attivare l'elettromagnete. Se non aspettasse il sensore oculare, l'elettromagnete si muoverebbe senza sollevare il disco. Ciò consente al robot di prendere una decisione in base ai dati ricevuti dal suo sensore oculare.
Soluzione Lab 5 Play Parte 1
Questo progetto renderà il braccio robotico:
- Attendi che il sensore oculare rilevi un oggetto.
- Se l'oggetto è verde, il disco verrà spostato come nel Lab 4.
- Il braccio robotico cercherà continuamente un oggetto verde grazie al blocco [Forever] presente attorno alla pila.
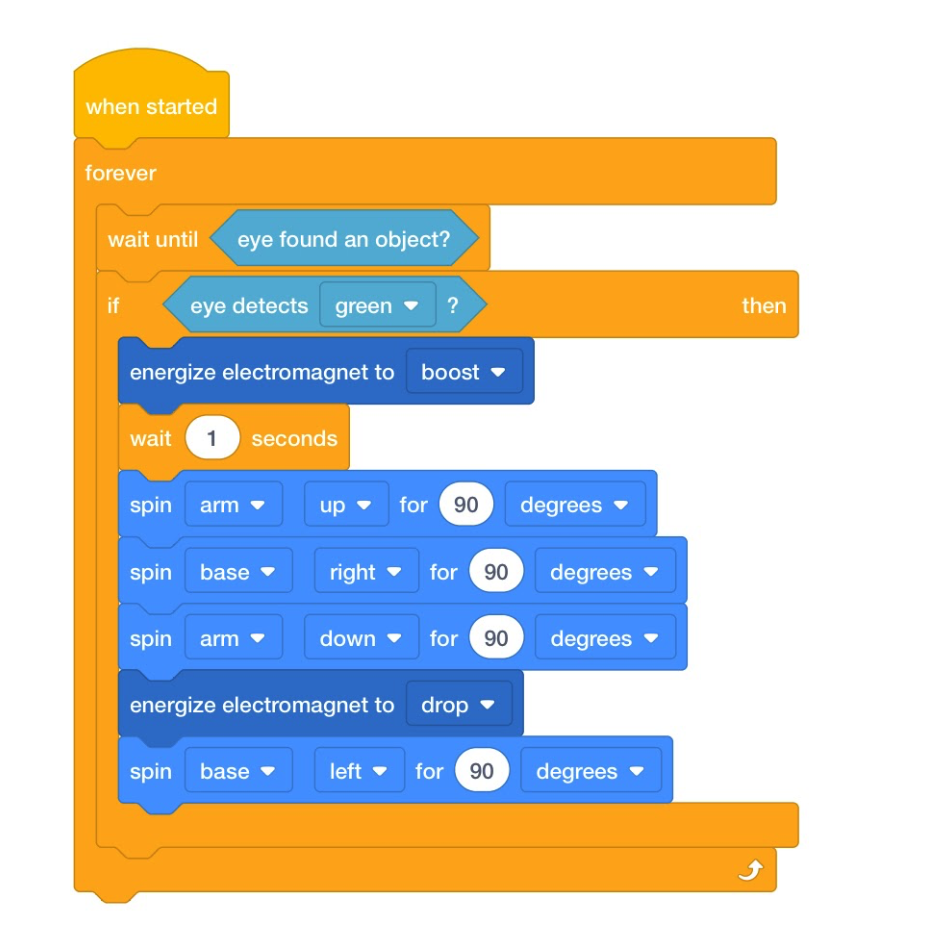
Soluzione Lab 5 Play Parte 2
Questo progetto renderà il braccio robotico:
- Attendi che il sensore oculare rilevi un oggetto.
- Se l'oggetto è verde, il braccio robotico solleverà il disco e lo sposterà di 90 gradi verso destra, quindi lo abbasserà e tornerà alla posizione iniziale.
- Se l'oggetto è rosso, il braccio robotico solleverà il disco e lo sposterà di 180 gradi verso destra, quindi lo abbasserà e tornerà alla posizione iniziale.
- Se l'oggetto è blu, il braccio robotico solleverà il disco e lo sposterà di 90 gradi verso sinistra, quindi lo abbasserà e tornerà alla posizione iniziale.
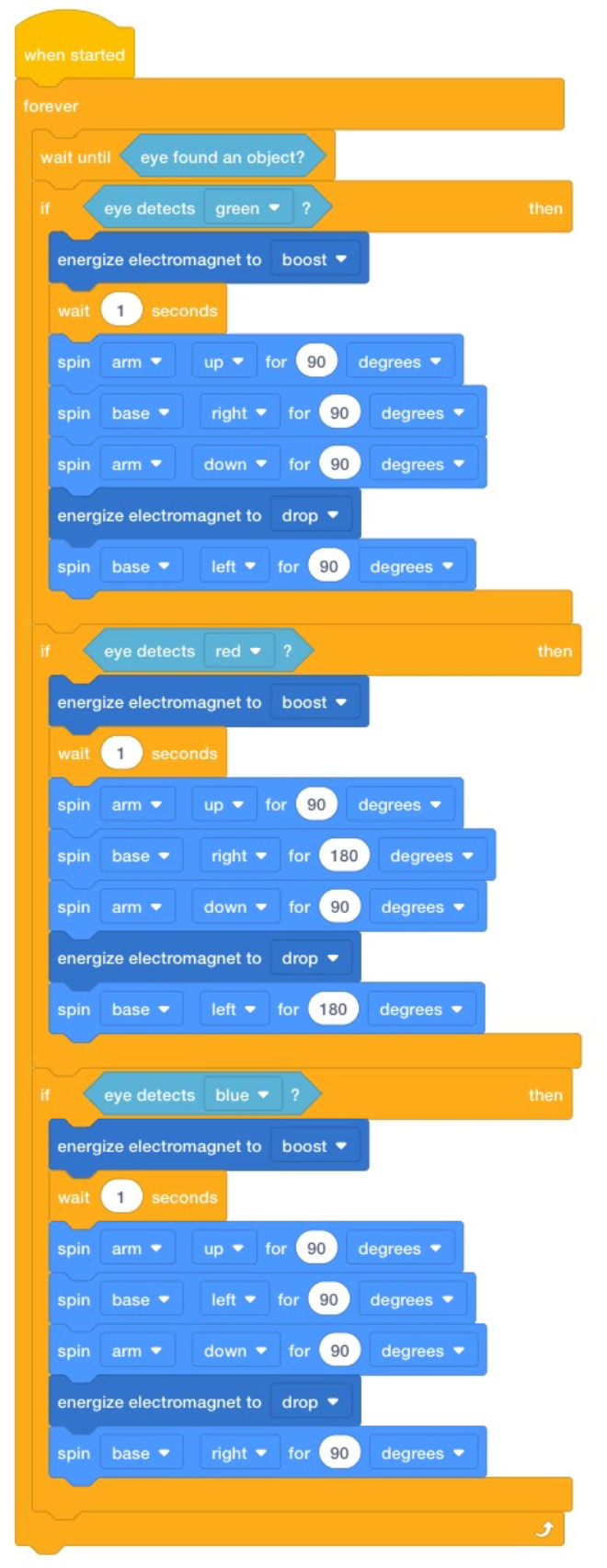
Questi progetti aggiungono istruzioni condizionali per consentire al robot di prendere decisioni ripetute sulla base dei dati provenienti dal sensore oculare. Vengono ripetuti perché il blocco [Per sempre] viene utilizzato per indicare al robot di controllare continuamente la presenza di oggetti.
Per ulteriori informazioni sui singoli blocchi utilizzati in questi progetti, utilizzare il file Aiuto caratteristica nel codice VEX GO. Per ulteriori informazioni sulle forme dei blocchi e sui loro significati, vedere il Bloccare Forme e significati articolo nella Biblioteca VEX. Se desideri saperne di più su I concetti di informatica alla base di queste soluzioni di codice, il Fondamenti di informatica Corso di certificazione per educatori potrebbe essere per te.
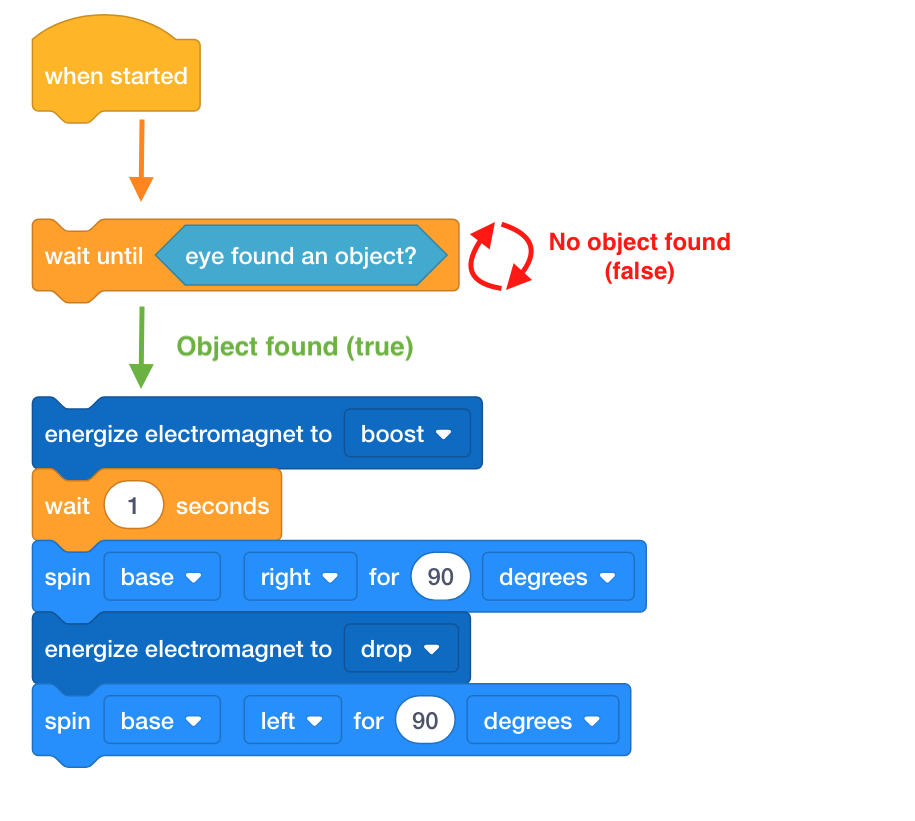
Che cos'è Project Flow?
Il flusso di progetto descrive l'ordine in cui i blocchi vengono eseguiti in un progetto. Tutti i progetti procedono dall'alto verso il basso, a partire dal blocco [Quando avviato]. Viene eseguito un solo blocco alla volta e una volta che un blocco ha completato le sue azioni o comportamenti, il progetto passa automaticamente al blocco successivo. Alcuni blocchi di controllo (di colore arancione) possono modificare il flusso del progetto in base a una condizione o al valore di un parametro. In questo progetto, ad esempio, il blocco [Aspetta fino a] interromperà il flusso del progetto e "attenderà fino a quando" la condizione (in questo caso, il sensore oculare ha trovato un oggetto) non verrà soddisfatta. Una volta soddisfatta questa condizione (il sensore oculare ha trovato un oggetto, quindi il blocco segnala il valore TRUE), il blocco [Attendi fino a] terminerà e passerà al blocco successivo nel progetto.
Pezzi VEX GO
Per informazioni più dettagliate sui componenti del kit VEX GO e sull'elettronica utilizzata nell'unità del braccio del robot, vedere ILPezzi In il kit VEX GO Articolo della Biblioteca VEX.