
Pelajaran 3: Menggunakan Sensor dengan Elektromagnet
Pada Pelajaran sebelumnya, Anda menggunakan perintah energize dan perintah Drivetrain untuk mengambil dan memindahkan cakram pada Disk Mover Playground dengan Robot VR. Pelajaran ini akan memecahkan tantangan yang sama menggunakan umpan balik sensor yang dilaporkan dan loop sementara.
Hasil belajar
- Identifikasi bahwa perintah down_eye.near_object melaporkan jika Sensor Mata Bawah cukup dekat dengan suatu objek untuk mendeteksi warna.
- Identifikasi bahwa perintah turn_to_heading mengubah drivetrain ke arah tertentu, menggunakan Sensor Gyro.
- Identifikasi bahwa perintah turn_to_heading akan menentukan arah mana yang akan dibelokkan berdasarkan arah Sensor Gyro saat ini.
- Jelaskan mengapa perintah turn_to_heading akan digunakan sebagai pengganti perintah turn atau turn_for.
- Jelaskan alur proyek yang menggunakan loopwhiledengan kondisibukandengan Elektromagnet untuk mengambil dan menggerakkan disk.
Mengapa Menggunakan Sensor untuk Memecahkan Masalah Penggerak Cakram?
Dalam Pelajaran 2, Robot VR melaju pada jarak tertentu menggunakan perintah drive_for untuk mengambil dan menggerakkan cakram biru kembali ke tujuan. Jarak antara Robot VR dan cakram biru pertama diperkirakan dan diperiksa menggunakan dimensi kotak kisi pada Disk Mover Playground. Meskipun hal ini menyelesaikan tantangan, masih terdapat banyak kemungkinan kesalahan dalam menduplikasi proses untuk mengambil beberapa disk pada jarak yang berbeda-beda, yang diperlukan untuk menyelesaikan Tantangan Pemindah Disk di akhir Unit ini. Menggunakan umpan balik sensor yang dilaporkan merupakan cara yang lebih efisien untuk mengatasi tantangan ini, sekaligus mengoptimalkan proyek dengan menggunakan lebih sedikit perintah.
Bagaimana jika Robot VR bertabrakan dengan cakram dan terlempar dari jalurnya? Bagaimana jika cakram berada di lokasi yang sedikit berbeda dari sasaran? Umpan balik dari sensor dapat digunakan untuk mengambil dan memindahkan disk secara tepat tanpa mengetahui lokasi pastinya di Disk Mover Playground.
Langkah-langkah untuk memecahkan tantangan tersebut dapat digunakan untuk membantu menentukan sensor mana yang akan digunakan dalam proyek.
-
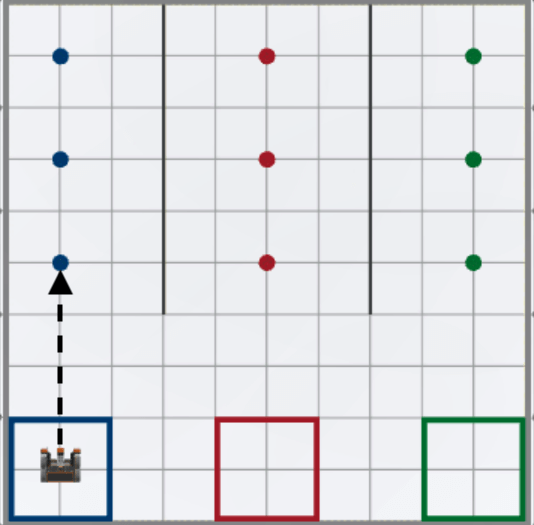
Pertama: Robot VR akan melaju ke disk pertama.
-
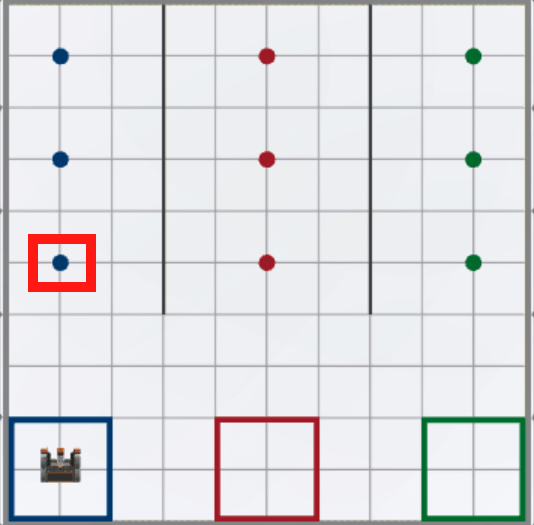
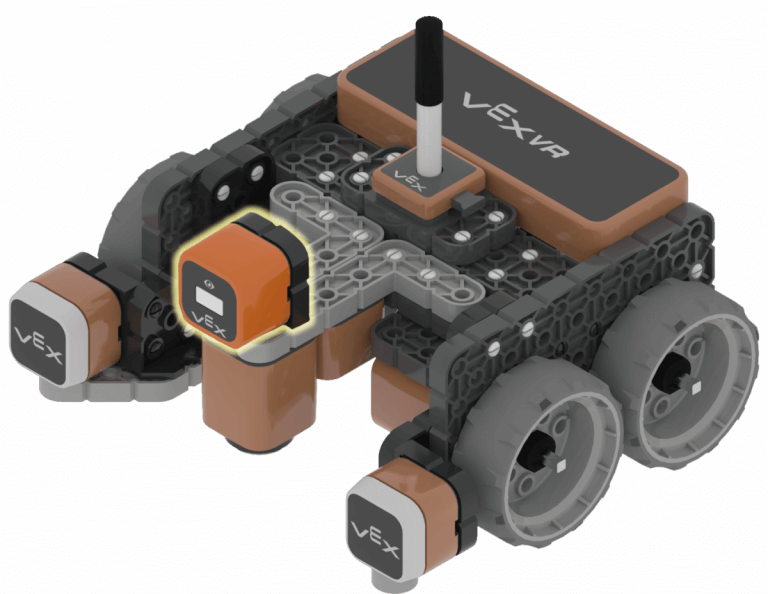
Cakramnya ada di tanah Taman Bermain. Untuk menentukan lokasi disk, Down Eye Sensor dapat digunakan dengan perintah down_eye.near_object. Perhatikan posisi Sensor Mata Bawah dalam kaitannya dengan Elektromagnet pada Robot VR.

-
-
Kedua: Robot VR akan menggunakan Elektromagnet untuk mengambil cakram pertama.

-
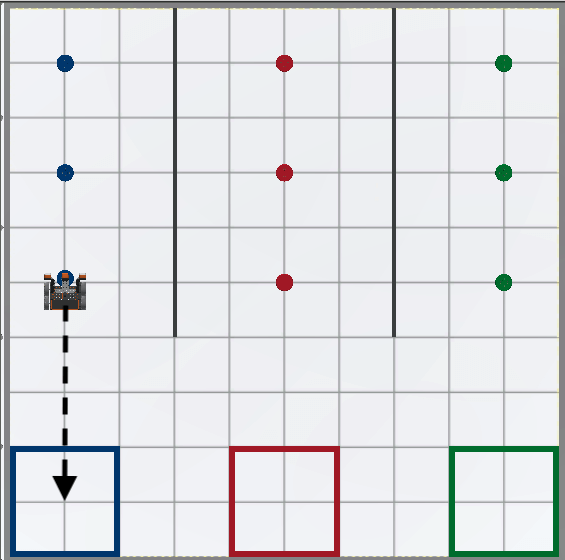
Ketiga: Robot VR akan melaju kembali ke tujuan.
-
Saat melaju kembali ke tujuan, Robot VR dapat menggunakan Sensor Jarak untuk menentukan kapan harus berhenti melaju. Sensor Jarak dapat digunakan untuk menentukan seberapa jauh bagian depan Robot VR dari dinding Taman Bermain. Dengan menggunakan perintahget_distance, Sensor Jarak dapat bergerak dan berhenti ketika berada pada jarak tertentu dari dinding, memposisikan Robot VR di ruang sasaran.
-
-
Terakhir: Robot VR akan menggunakan Elektromagnet untuk menjatuhkan cakram ke gawang.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.