
पाठ 3: विद्युत चुम्बक के साथ सेंसर का उपयोग
पिछले पाठ में, आपने वीआर रोबोट के साथ डिस्क मूवर प्लेग्राउंड पर डिस्क को उठाने और स्थानांतरित करने के लिए एनर्जाइज़ कमांड और ड्राइवट्रेन कमांड का उपयोग किया था। यह पाठ रिपोर्टेड सेंसर फीडबैक और while लूप का उपयोग करके उसी चुनौती को हल करेगा।
सीखने के परिणाम
- पहचानें कि down_eye.near_object कमांड रिपोर्ट करता है कि क्या डाउन आई सेंसर किसी रंग का पता लगाने के लिए किसी वस्तु के काफी करीब है।
- पहचानें कि turn_to_heading कमांड गायरो सेंसर का उपयोग करके ड्राइवट्रेन को एक विशिष्ट हेडिंग पर मोड़ देता है।
- पहचानें कि turn_to_heading कमांड गायरो सेंसर की वर्तमान हेडिंग के आधार पर यह निर्धारित करेगा कि किस दिशा में मुड़ना है।
- समझाएं कि turn या turn_for कमांड के स्थान पर turn_to_heading कमांड का उपयोग क्यों किया जाएगा।
- एक परियोजना के प्रवाह का वर्णन करें जो एक डिस्क को उठाने और स्थानांतरित करने के लिए इलेक्ट्रोमैग्नेट के साथनहींस्थिति के साथजबकिलूप का उपयोग करता है।
डिस्क मूवर समस्या को हल करने के लिए सेंसर का उपयोग क्यों करें?
पाठ 2 में, वी.आर. रोबोट ने drive_for कमांड का उपयोग करके एक नीली डिस्क को उठाकर लक्ष्य तक वापस ले जाने के लिए एक निर्दिष्ट दूरी तय की। वीआर रोबोट और पहली नीली डिस्क के बीच की दूरी का अनुमान लगाया गया और डिस्क मूवर प्लेग्राउंडपर ग्रिड वर्गों के आयामों का उपयोग करके जांच की गई। यद्यपि इससे चुनौती हल हो गई, लेकिन विभिन्न दूरियों पर स्थित अनेक डिस्कों को उठाने के लिए प्रक्रिया को दोहराने में त्रुटि की काफी गुंजाइश है, जो इस इकाई के अंत में डिस्क मूवर चुनौती को हल करने के लिए आवश्यक है। रिपोर्ट किए गए सेंसर फीडबैक का उपयोग करना इस चुनौती को हल करने का अधिक कुशल तरीका है, साथ ही कम कमांड का उपयोग करके परियोजना को अनुकूलित भी किया जा सकता है।
क्या होगा यदि वीआर रोबोट किसी डिस्क से टकरा जाए और अपने रास्ते से भटक जाए? यदि डिस्क लक्ष्य से थोड़ा अलग स्थान पर हों तो क्या होगा? सेंसर से प्राप्त फीडबैक का उपयोग मूवर प्लेग्राउंडपर उनके सटीक स्थान को जाने बिना डिस्क को ठीक से उठाने और स्थानांतरित करने के लिए किया जा सकता है।
चुनौती को हल करने के चरणों का उपयोग यह निर्धारित करने में किया जा सकता है कि परियोजना में कौन से सेंसर का उपयोग किया जाए।
-
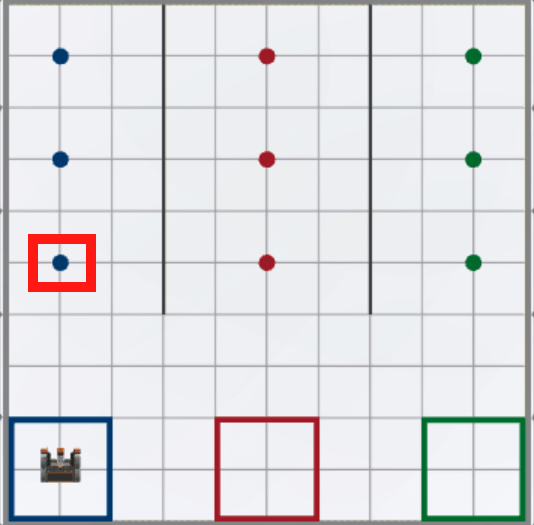
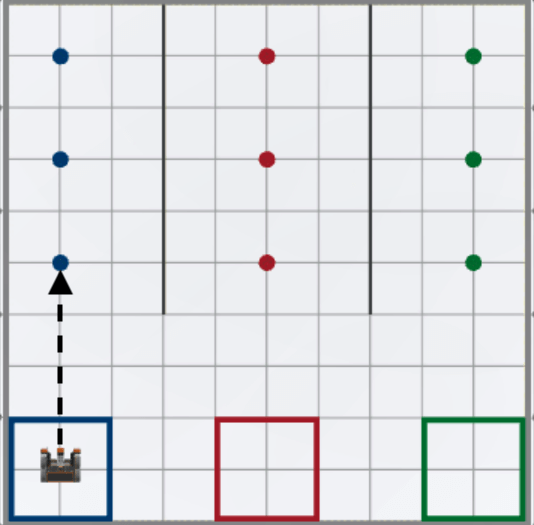
पहला: वीआर रोबोट पहली डिस्क तक जाएगा।
-
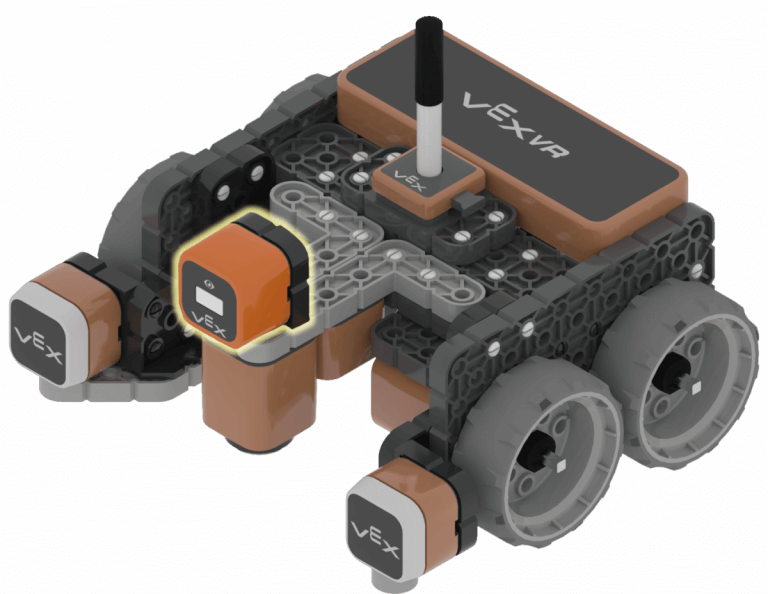
डिस्क खेल के मैदान की ज़मीन पर हैं। यह निर्धारित करने के लिए कि डिस्क कहां स्थित है, डाउन आई सेंसर का उपयोग down_eye.near_objectकमांड के साथ किया जा सकता है। वी.आर. रोबोट पर इलेक्ट्रोमैग्नेट के संबंध में डाउन आई सेंसर की स्थिति पर ध्यान दें।

-
-
दूसरा: वीआर रोबोट पहली डिस्क को उठाने के लिए इलेक्ट्रोमैग्नेट का उपयोग करेगा।

-
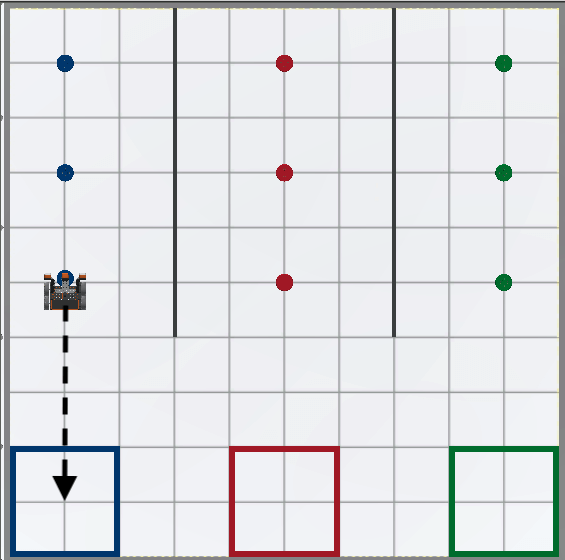
तीसरा: वीआर रोबोट वापस लक्ष्य की ओर जाएगा।
-
लक्ष्य की ओर वापस आते समय, वीआर रोबोट दूरी सेंसर का उपयोग करके यह निर्धारित कर सकता है कि उसे कब गाड़ी रोकनी है। दूरी सेंसर का उपयोग यह निर्धारित करने के लिए किया जा सकता है कि वीआर रोबोट का अगला भाग खेल के मैदान की दीवार से कितनी दूरी पर है। get_distanceकमांड का उपयोग करते हुए, डिस्टेंस सेंसर दीवार से निर्दिष्ट दूरी पर पहुंचकर रुक सकता है, जिससे VR रोबोट लक्ष्य स्थान पर स्थित हो जाता है।
-
-
अंत में: वीआर रोबोट इलेक्ट्रोमैग्नेट का उपयोग करके डिस्क को लक्ष्य में गिराएगा।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।