
Lezione 3: Utilizzo dei sensori con l'elettromagnete
Nella lezione precedente hai utilizzato i comandi energize e Drivetrain per raccogliere e spostare i dischi sul Mover Playground con il robot VR. Questa lezione risolverà la stessa sfida utilizzando il feedback dei sensori segnalati e i cicli mentre.
Risultati di apprendimento
- Identificare che il comando down_eye.near_object segnali se il sensore Down Eye è abbastanza vicino a un oggetto da rilevare un colore.
- Identifica che il comando turn_to_heading orienta la trasmissione verso una direzione specifica, utilizzando il sensore giroscopico.
- Si noti che il comando turn_to_heading determinerà la direzione in cui virare in base alla rotta corrente del sensore giroscopico.
- Spiega perché verrebbe utilizzato il comando turn_to_heading invece del comando o turn_for.
- Descrivi il flusso di un progetto che utilizza un ciclo while con una condizione not con l'elettromagnete per sollevare e spostare un disco.
Perché utilizzare i sensori per risolvere il problema del disk mover?
Nella lezione 2, il robot VR ha percorso una distanza specificata utilizzando il comando drive_for per raccogliere un disco blu e riportarlo all'obiettivo. La distanza tra il Robot VR e il primo disco blu è stata stimata e verificata utilizzando le dimensioni dei quadrati della griglia sul Disk Mover Playground. Sebbene questo abbia risolto la sfida, c'è molto spazio per errori nel duplicare il processo per raccogliere più dischi a varie distanze, il che è necessario per risolvere la Disk Mover Challenge alla fine di questa unità. L'utilizzo del feedback del sensore riportato è un modo più efficiente per risolvere questa sfida, ottimizzando al contempo il progetto utilizzando meno comandi.
Cosa succede se il robot VR si scontra con un disco e viene buttato fuori rotta? Cosa succede se i dischi si trovano in posizioni leggermente diverse dall'obiettivo? Il feedback dei sensori può essere utilizzato per raccogliere e spostare con precisione i dischi senza conoscere la loro posizione esatta sul Disk Mover Playground.
I passaggi per risolvere la sfida possono essere utilizzati per aiutare a determinare quali sensori utilizzare nel progetto.
-
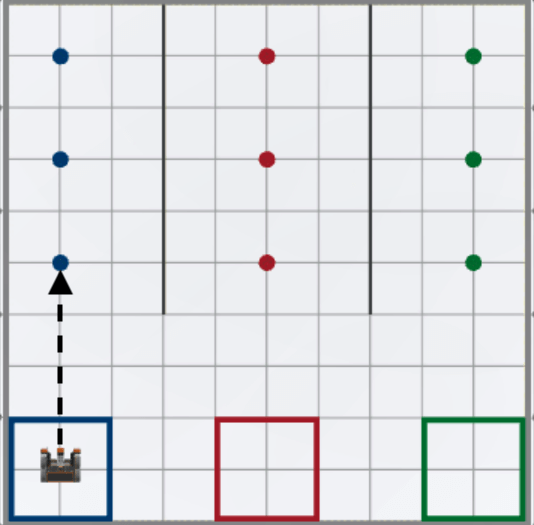
Primo: il robot VR si sposterà sul primo disco.
-
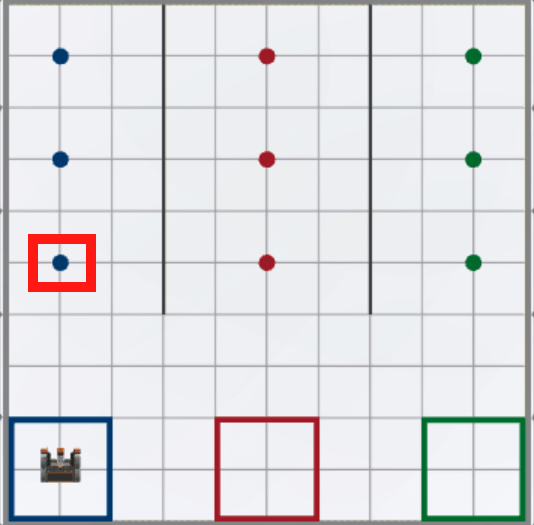
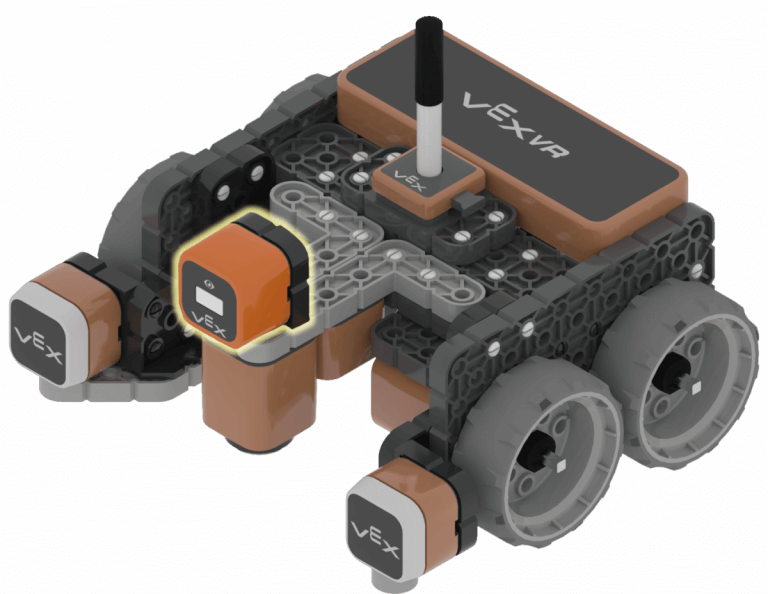
I dischi sono a terra del Parco Giochi. Per determinare dove si trova un disco, il sensore Down Eye può essere utilizzato con il comando down_eye.near_object. Notare la posizione del sensore Down Eye in relazione all'elettromagnete sul robot VR.

-
-
Secondo: il robot VR utilizzerà l'elettromagnete per raccogliere il primo disco.

-
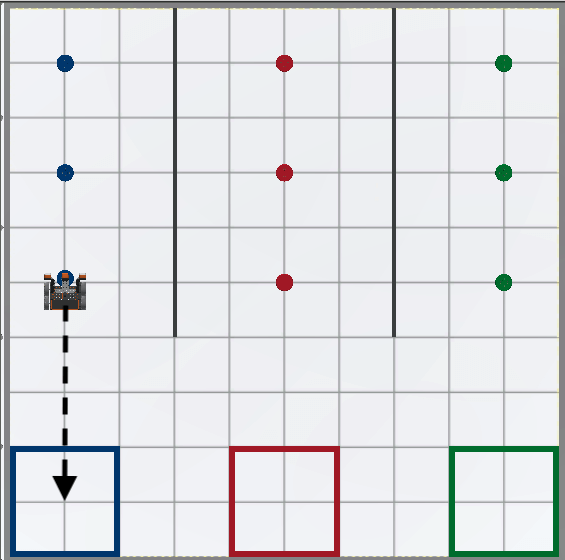
Terzo: il robot VR tornerà all'obiettivo.
-
Durante la guida verso l'obiettivo, il robot VR può utilizzare il sensore di distanza per determinare quando smettere di guidare. Il sensore di distanza può essere utilizzato per determinare la distanza della parte anteriore del robot VR dalla parete del parco giochi. Utilizzando il comando get_distance , il sensore di distanza può muoversi e fermarsi quando si trova a una distanza specificata dal muro, posizionando il robot VR nello spazio obiettivo.
-
-
Infine: il robot VR utilizzerà l'elettromagnete per far cadere il disco nella porta.
Selezionare il pulsante Avanti per continuare con il resto della lezione.