
Lição 3: Usando sensores com o eletroímã
Na lição anterior, utilizou o comando energize e os comandos Drivetrain para apanhar e mover discos no Disk Mover Playground com o VR Robot. Esta lição resolverá o mesmo desafio utilizando o feedback relatado do sensor e enquanto loops.
Resultados de Aprendizagem
- Identifique se o comando down_eye.near_object relata se o sensor Down Eye está próximo o suficiente de um objeto para detectar uma cor.
- Identifique que o comando turn_to_heading vira um grupo motopropulsor para um rumo específico, utilizando o Sensor Gyro.
- Identifique que o comando turn_to_heading determinará qual a direção a virar com base no rumo atual do Sensor Gyro.
- Explique por que razão seria utilizado um comando turn_to_heading em vez de um comando turn ou turn_for.
- Descreva o fluxo de um projeto que utiliza um loop enquanto com uma condição e não com o eletroíman para apanhar e mover um disco.
Por que usar sensores para resolver o problema do movimentador de disco?
Na Lição 2, o robô VR percorreu uma distância especificada utilizando o comando drive_for para apanhar e mover um disco azul de volta para a baliza. A distância entre o Robô VR e o primeiro disco azul foi estimada e verificada usando as dimensões dos quadrados da grade no Disk Mover Playground. Embora isso tenha resolvido o desafio, há muito espaço para erros na duplicação do processo para pegar vários discos a várias distâncias, o que é necessário para resolver o Desafio do Movimentador de Disco no final desta Unidade. Usar o feedback do sensor relatado é uma maneira mais eficiente de resolver esse desafio, ao mesmo tempo em que otimiza o projeto usando menos comandos.
E se o robô VR colidir com um disco e sair do curso? E se os discos estiverem em locais ligeiramente diferentes da meta? O feedback dos sensores pode ser usado para pegar e mover discos com precisão sem saber sua localização exata no Disk Mover Playground.
As etapas para resolver o desafio podem ser usadas para ajudar a determinar quais sensores usar no projeto.
-
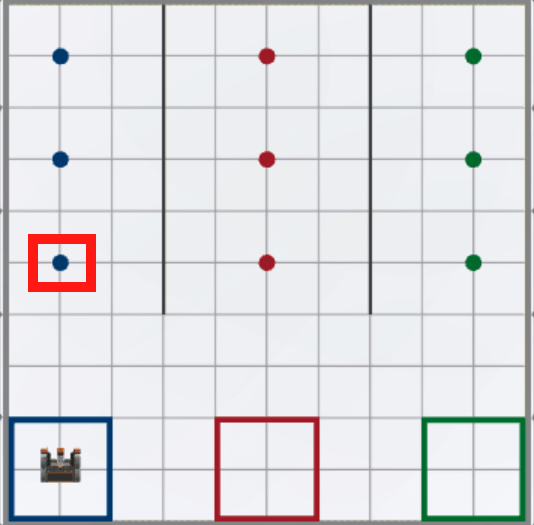
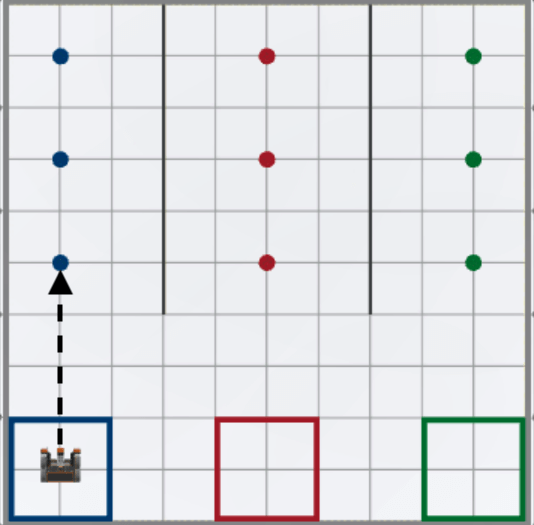
Primeiro: o robô VR irá para o primeiro disco.
-
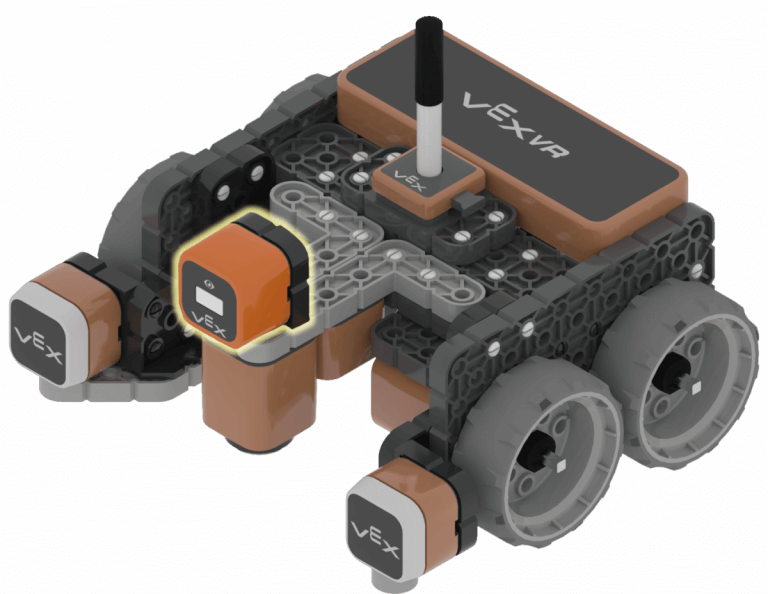
Os discos estão no chão do Playground. Para determinar onde um disco está localizado, o Down Eye Sensor pode ser usado com o comando down_eye.near_object. Observe a posição do sensor do olho para baixo em relação ao eletroímã no robô VR.

-
-
Segundo: O Robô VR usará o Eletroímã para pegar o primeiro disco.

-
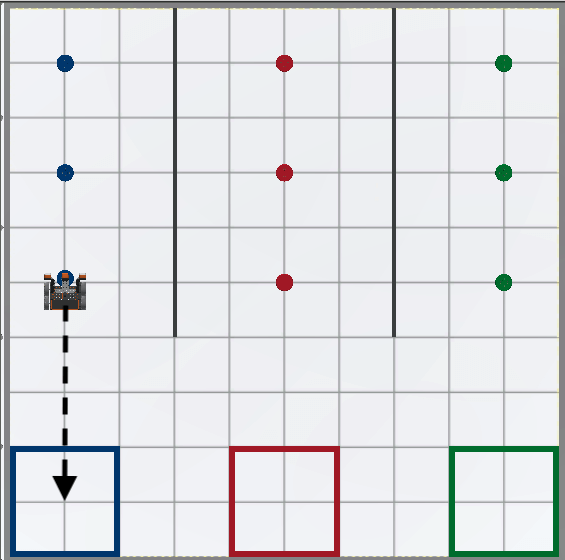
Terceiro: O Robô de RV voltará para o gol.
-
Ao voltar para a meta, o Robô VR pode usar o Sensor de Distância para determinar quando parar de dirigir. O Sensor de Distância pode ser usado para determinar a que distância a frente do Robô VR está da parede do Playground. Utilizando o comando get_distance , o Sensor de Distância pode conduzir e parar quando se encontra a uma distância especificada da parede, posicionando o Robot VR no espaço da baliza.
-
-
Finalmente: o robô VR usará o eletroímã para soltar o disco na baliza.
Selecione o botão Seguinte para continuar com o resto desta lição.