
수업 3: 전자석을 이용한 센서 사용
이전 수업에서는 활성화 명령과 드라이브트레인 명령을 사용하여 VR 로봇으로 디스크 무버 플레이그라운드 에서 디스크를 집어 올리고 옮겼습니다. 이 수업에서는 보고된 센서 피드백과 while 루프를 사용하여 동일한 과제를 해결합니다.
학습 성과
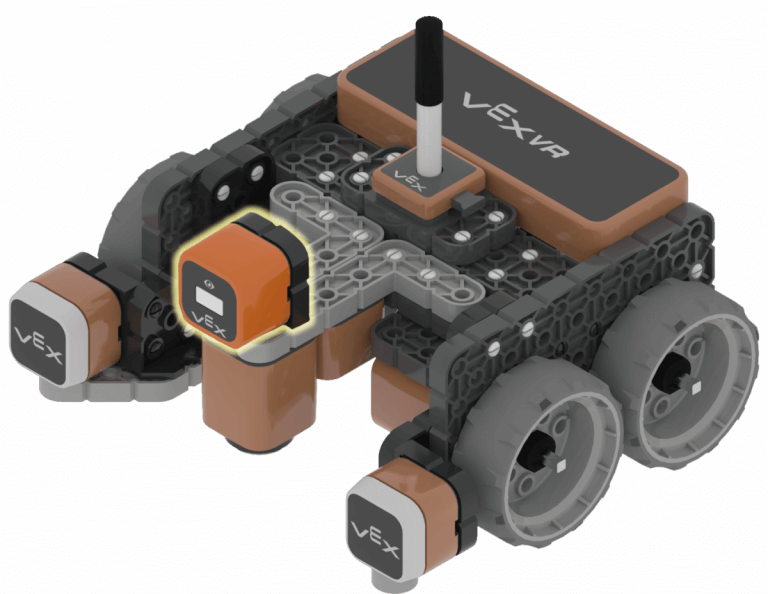
- down_eye.near_object 명령은 다운 아이 센서가 색상을 감지할 수 있을 만큼 물체에 충분히 가까운지 보고한다는 것을 확인합니다.
- 자이로 센서를 사용하여 turn_to_heading 명령이 드라이브트레인을 특정 방향으로 회전시키는지 확인합니다.
- turn_to_heading 명령은 자이로 센서의 현재 방향을 기반으로 어느 방향으로 회전할지 결정합니다.
- turn 또는 turn_for 명령 대신 turn_to_heading 명령을 사용하는 이유를 설명하세요.
- 전자석을 사용하여 디스크를 집어 들고 옮기기 위해not조건과 함께while루프를 사용하는 프로젝트의 흐름을 설명하세요.
디스크 이동 문제를 해결하기 위해 센서를 사용하는 이유는 무엇입니까?
2과에서는 VR 로봇이 drive_for 명령을 사용하여 지정된 거리를 이동한 후 파란색 디스크를 집어 올려 목표 지점으로 다시 옮겼습니다. VR 로봇과 첫 번째 파란색 디스크 사이의 거리는 Disk Mover Playground의 격자 사각형의 치수를 사용하여 추정하고 확인했습니다. 이것으로 과제는 해결되었지만, 다양한 거리에 있는 여러 디스크를 집어 올리는 과정을 반복하는 데는 오류가 발생할 여지가 많습니다. 이는 이 단원의 마지막에 있는 디스크 이동 과제를 해결하는 데 필요합니다. 보고된 센서 피드백을 활용하는 것은 이러한 과제를 해결하는 더 효율적인 방법이며, 더 적은 명령을 사용하여 프로젝트를 최적화할 수도 있습니다.
VR 로봇이 디스크와 충돌하여 경로를 벗어나면 어떻게 되나요? 디스크가 목표와 약간 다른 위치에 있다면 어떨까요? 센서의 피드백을 사용하면 Disk Mover Playground에서 디스크의 정확한 위치를 알지 못해도 디스크를 정확하게 집어서 옮길 수 있습니다.
과제를 해결하는 단계는 프로젝트에 사용할 센서를 결정하는 데 도움이 될 수 있습니다.
-
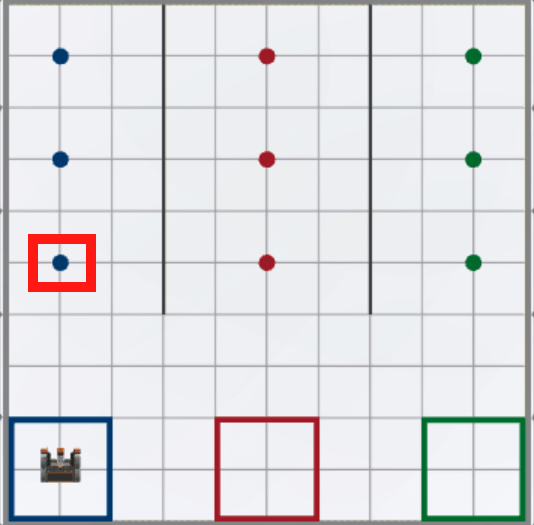
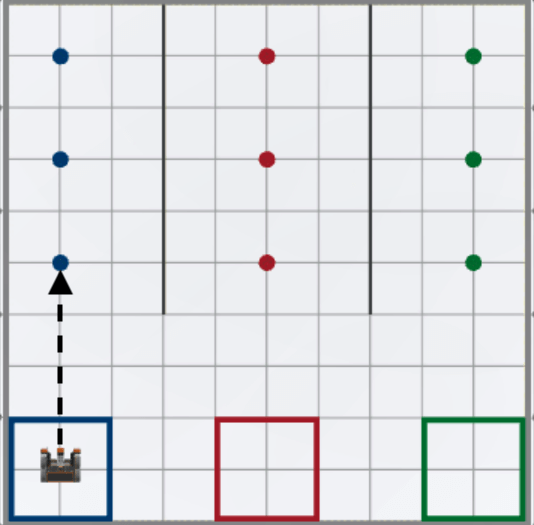
첫째: VR 로봇이 첫 번째 디스크로 이동합니다.
-
디스크는 놀이터 바닥에 있습니다. 디스크의 위치를 확인하려면 다운 아이 센서를 down_eye.near_object명령과 함께 사용할 수 있습니다. VR 로봇의 전자석과 관련된 다운 아이 센서의 위치를 주목하세요.

-
-
두 번째: VR 로봇은 전자석을 사용하여 첫 번째 디스크를 집어 올립니다.

-
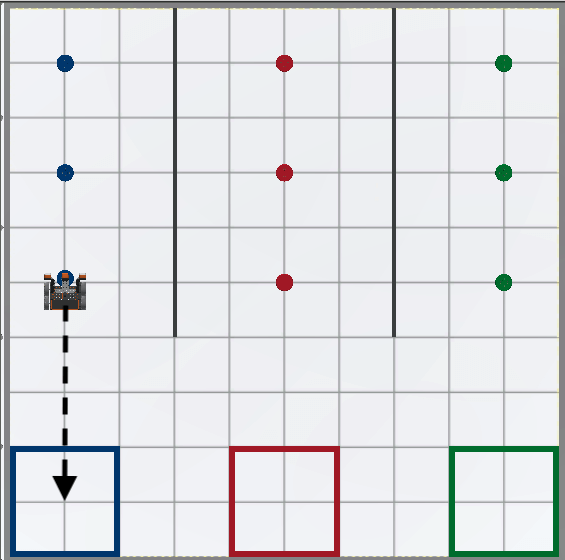
셋째: VR 로봇은 목표를 향해 다시 운전합니다.
-
VR 로봇은 목적지까지 돌아가는 동안 거리 센서를 사용하여 언제 운전을 멈출지 판단할 수 있습니다. 거리 센서는 VR 로봇의 앞면이 놀이터 벽으로부터 얼마나 떨어져 있는지 확인하는 데 사용할 수 있습니다. get_distance명령을 사용하면 거리 센서가 벽으로부터 지정된 거리에 도달하면 구동하고 정지하여 VR 로봇을 목표 공간에 배치할 수 있습니다.
-
-
마지막으로 VR 로봇은 전자석을 사용하여 디스크를 목표에 떨어뜨립니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.