
บทที่ 3: การใช้เซ็นเซอร์กับแม่เหล็กไฟฟ้า
ในบทเรียนก่อนหน้านี้คุณ ใช้ คำสั่ง ENERGIZE และคำสั่ง Drivetrain เพื่อรับและย้ายดิสก์บน Disk Mover Playground ด้วย VR Robot บทเรียนนี้จะแก้ปัญหาเดียวกันโดยใช้ข้อเสนอแนะเซ็นเซอร์ที่รายงานและ ขณะ วนซ้ำ
ผลการเรียนรู้
- ระบุว่า คำสั่ง down_eye.near_object รายงานว่า Down Eye Sensor อยู่ใกล้กับวัตถุเพื่อตรวจจับสีหรือไม่
- ระบุว่าคำสั่ง turn_to_heading จะเปลี่ยนระบบส่งกำลังไปยังทิศทางที่ระบุโดยใช้เซ็นเซอร์ Gyro
- ระบุว่าคำสั่ง turn_to_heading จะกำหนดทิศทางที่จะเลี้ยวโดยอิงจากทิศทางปัจจุบันของ Gyro Sensor
- อธิบายว่าทำไมจึงต้องใช้คำสั่ง turn_to_heading แทนคำสั่ง turn หรือ turn_for
- อธิบายกระบวนการทำงานของโครงการที่ใช้ลูป while กับเงื่อนไข ไม่ใช่ โดยใช้แม่เหล็กไฟฟ้าเพื่อหยิบและเคลื่อนย้ายแผ่นดิสก์
ทำไมต้องใช้เซ็นเซอร์เพื่อแก้ปัญหา Disk Mover?
ในบทเรียนที่ 2 หุ่นยนต์ VR ขับไปตามระยะทางที่กำหนดโดยใช้คำสั่ง drive_for เพื่อหยิบและเคลื่อนย้ายแผ่นดิสก์สีน้ำเงินกลับไปยังเป้าหมาย ระยะห่างระหว่าง VR Robot และดิสก์สีน้ำเงินตัวแรกถูกประเมินและตรวจสอบโดยใช้ขนาดของสี่เหลี่ยมตารางบน Disk MoverPlayground แม้ว่าสิ่งนี้จะแก้ปัญหาได้แต่ก็มีช่องว่างมากสำหรับข้อผิดพลาดในการทำซ้ำกระบวนการรับดิสก์หลายตัวในระยะทางต่างๆซึ่งจำเป็นในการแก้ปัญหา Disk Mover Challenge ในตอนท้ายของหน่วยนี้ การใช้ข้อเสนอแนะจากเซ็นเซอร์ที่รายงานเป็นวิธีที่มีประสิทธิภาพมากขึ้นในการแก้ปัญหานี้ในขณะที่ยังเพิ่มประสิทธิภาพโครงการโดยใช้คำสั่งน้อยลง
จะเกิดอะไรขึ้นหากหุ่นยนต์ VR ชนกับดิสก์และถูกชนออกนอกเส้นทาง? จะเกิดอะไรขึ้นหากดิสก์อยู่ในตำแหน่งที่แตกต่างจากเป้าหมายเล็กน้อย? ข้อเสนอแนะจากเซ็นเซอร์สามารถใช้เพื่อรับและย้ายดิสก์ได้อย่างแม่นยำโดยไม่ทราบตำแหน่งที่แน่นอนบน Disk MoverPlayground
ขั้นตอนในการแก้ปัญหาสามารถนำมาใช้เพื่อช่วยในการกำหนดว่าจะใช้เซ็นเซอร์ใดในโครงการ
-
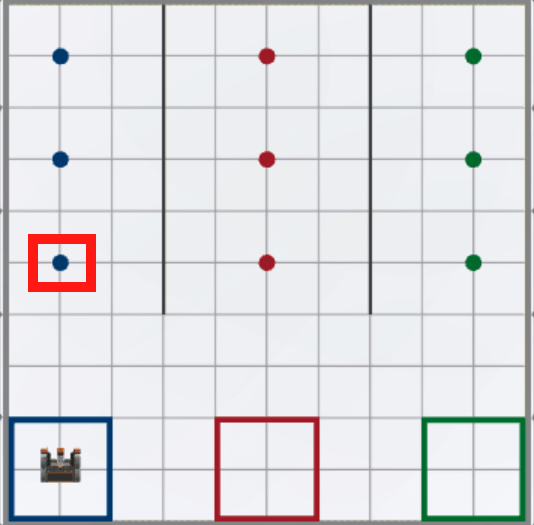
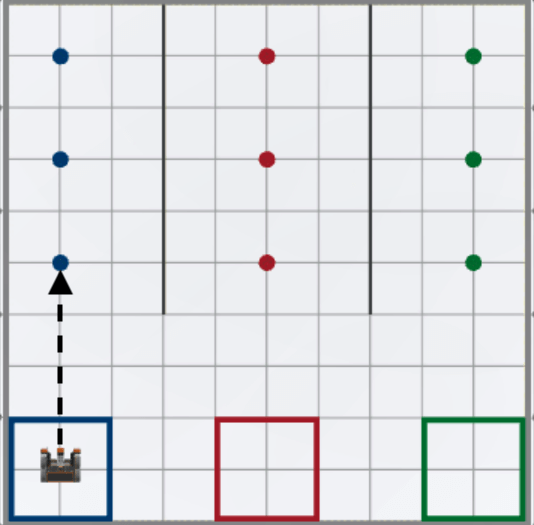
ประการแรก: หุ่นยนต์ VR จะขับไปยังดิสก์แรก
-
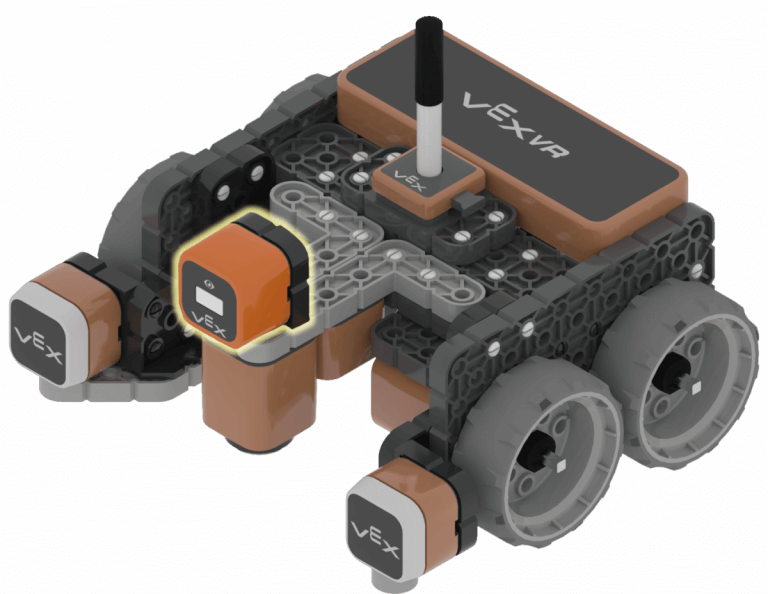
ดิสก์อยู่บนพื้นสนามเด็กเล่น ในการกำหนดตำแหน่งของดิสก์เซ็นเซอร์ดวงตาลงสามารถใช้ กับ คำสั่ง down_eye.near_object สังเกตตำแหน่งของเซ็นเซอร์ดวงตาลงที่สัมพันธ์กับแม่เหล็กไฟฟ้าบนหุ่นยนต์ VR

-
-
ประการที่สอง: หุ่นยนต์ VR จะใช้แม่เหล็กไฟฟ้าเพื่อรับดิสก์ตัวแรก

-
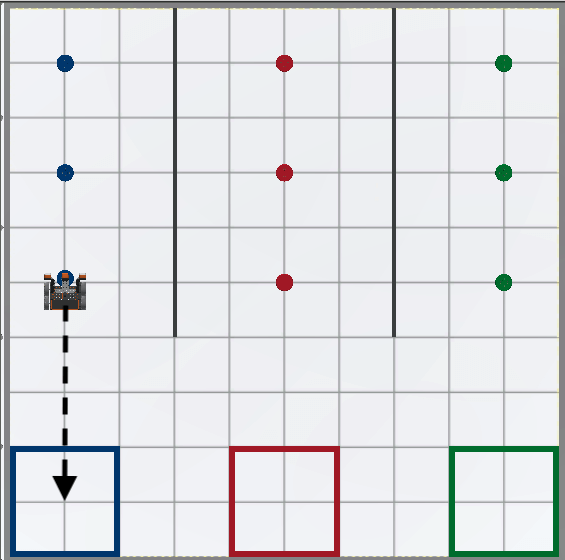
ประการที่สาม: หุ่นยนต์ VR จะขับรถกลับไปยังเป้าหมาย
-
ในขณะที่ขับรถกลับไปที่เป้าหมายหุ่นยนต์ VR สามารถใช้เซ็นเซอร์ระยะทางเพื่อกำหนดเวลาที่จะหยุดการขับขี่ เซ็นเซอร์ระยะทางสามารถใช้เพื่อกำหนดว่าด้านหน้าของหุ่นยนต์ VR อยู่ห่างจากผนังของสนามเด็กเล่นเท่าใด เมื่อใช้คำสั่ง get_distance เซ็นเซอร์วัดระยะทางจะขับเคลื่อนและหยุดเมื่ออยู่ห่างจากผนังถึงระยะห่างที่กำหนด โดยวางตำแหน่งหุ่นยนต์ VR ในพื้นที่เป้าหมาย
-
-
สุดท้าย: หุ่นยนต์ VR จะใช้แม่เหล็กไฟฟ้าเพื่อ วางดิสก์ลงในเป้าหมาย

เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป