
الدرس 3: استخدام أجهزة الاستشعار مع المغناطيس الكهربائي
في الدرس السابق، استخدمت الأمر energize وأوامر Drivetrain لالتقاط الأقراص وتحريكها على Disk Mover Playground باستخدام روبوت الواقع الافتراضي. سيحل هذا الدرس نفس التحدي باستخدام ملاحظات المستشعر المبلغ عنها وأثناء الحلقات.
مخرجات التعلم
- حدد أن الأمر down_eye.near_object يبلغ عما إذا كان مستشعر العين السفلية قريبًا بدرجة كافية من الكائن لاكتشاف اللون.
- حدد أن الأمر turn_to_heading يقوم بتحويل مجموعة نقل الحركة إلى اتجاه معين، باستخدام مستشعر الجيروسكوب.
- حدد أن الأمر turn_to_heading سيحدد الاتجاه الذي يجب أن ندور فيه استنادًا إلى الاتجاه الحالي لمستشعر الجيروسكوب.
- اشرح لماذا يتم استخدام الأمر turn_to_heading بدلاً من الأمر turn أو الأمر turn_for.
- وصف تدفق مشروع يستخدم حلقة بينما مع شرط وليس مع المغناطيس الكهربائي لالتقاط القرص وتحريكه.
لماذا تستخدم أجهزة الاستشعار لحل مشكلة محرك القرص ؟
في الدرس الثاني، قطع روبوت الواقع الافتراضي مسافة محددة باستخدام الأمر drive_for لالتقاط قرص أزرق وتحريكه مرة أخرى إلى الهدف. تم تقدير المسافة بين روبوت الواقع الافتراضي والقرص الأزرق الأول وفحصها باستخدام أبعاد مربعات الشبكة على Disk Mover Playground. في حين أن هذا قد حل التحدي، إلا أن هناك مجالًا كبيرًا للخطأ في تكرار العملية لالتقاط أقراص متعددة على مسافات مختلفة، وهو أمر ضروري لحل تحدي محرك الأقراص في نهاية هذه الوحدة. يعد استخدام ملاحظات المستشعر المبلغ عنها طريقة أكثر فاعلية لحل هذا التحدي، مع تحسين المشروع أيضًا باستخدام عدد أقل من الأوامر.
ماذا لو اصطدم روبوت الواقع الافتراضي بقرص وانحرف عن مساره ؟ ماذا لو كانت الأقراص في مواقع مختلفة قليلاً عن الهدف ؟ يمكن استخدام التغذية الراجعة من المستشعرات لالتقاط الأقراص ونقلها بدقة دون معرفة موقعها الدقيق في ملعب Disk Mover.
يمكن استخدام خطوات حل التحدي للمساعدة في تحديد أجهزة الاستشعار التي يجب استخدامها في المشروع.
-
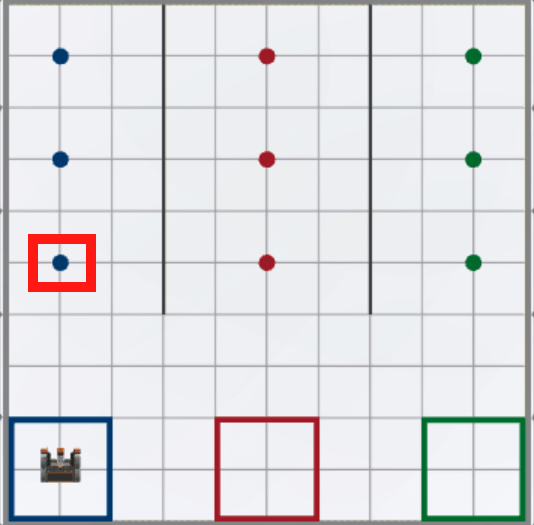
أولاً: سيقود روبوت الواقع الافتراضي إلى القرص الأول.
-
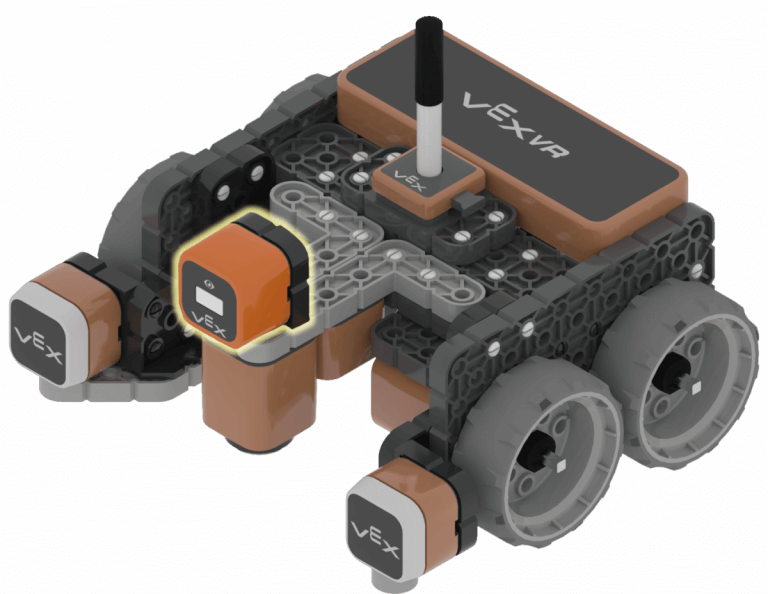
الأقراص على أرض الملعب. لتحديد مكان وجود القرص، يمكن استخدام مستشعر العين السفلية مع الأمر down_eye.near_object . لاحظ موضع مستشعر العين السفلية فيما يتعلق بالمغناطيس الكهربائي على روبوت الواقع الافتراضي.

-
-
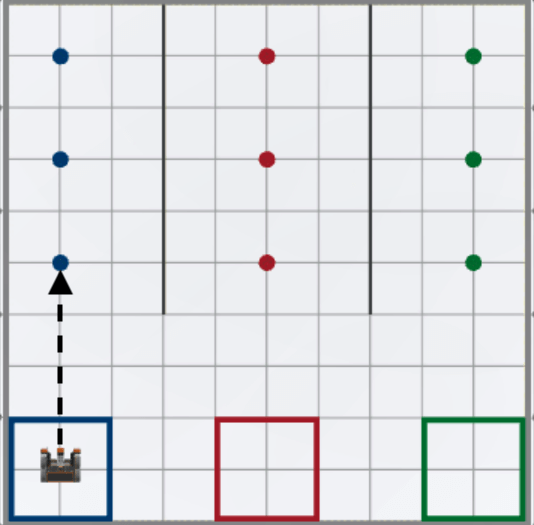
ثانيًا: سيستخدم روبوت الواقع الافتراضي المغناطيس الكهرومغناطيسي لالتقاط القرص الأول.

-
ثالثًا: سيعود روبوت الواقع الافتراضي إلى الهدف.
-
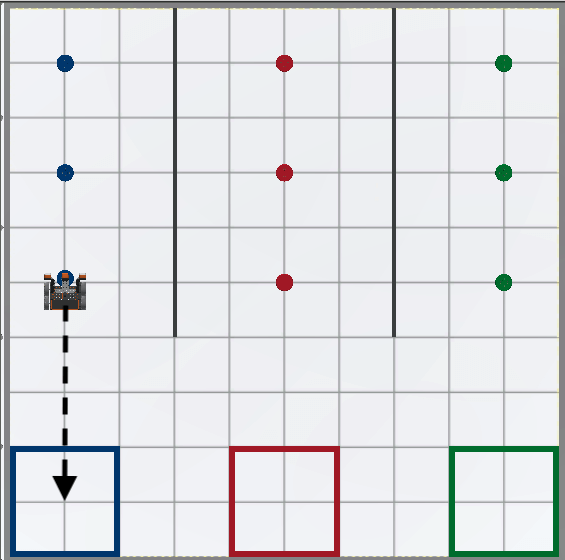
أثناء القيادة إلى الهدف، يمكن لروبوت الواقع الافتراضي استخدام مستشعر المسافة لتحديد وقت التوقف عن القيادة. يمكن استخدام مستشعر المسافة لتحديد مدى بعد مقدمة روبوت الواقع الافتراضي عن جدار الملعب. باستخدام أمر get_ distance، يمكن لمستشعر المسافة القيادة والتوقف عندما تكون مسافة محددة من الجدار، ووضع روبوت الواقع الافتراضي في مساحة الهدف.
-
-
أخيرًا: سيستخدم روبوت الواقع الافتراضي المغناطيس الكهربائي لإسقاط القرص في الهدف.
قم باختيار الزر التالي لمواصلة بقية هذا الدرس.