
Lección 3: Uso de sensores con el electroimán
En la lección anterior, utilizó el comando energizar y los comandos Drivetrain para recoger y mover discos en el patio de juegos Disk Mover con el robot VR. Esta lección resolverá el mismo desafío utilizando la retroalimentación del sensor informada y bucles mientras que.
Resultados de aprendizaje
- Identifique que el comando down_eye.near_object informa si el sensor Down Eye está lo suficientemente cerca de un objeto como para detectar un color.
- Identifique que el comando turn_to_heading gira un tren motriz hacia un rumbo específico, utilizando el sensor giroscópico.
- Identifique que el comando turn_to_heading determinará en qué dirección girar según el rumbo actual del sensor giroscópico.
- Explique por qué se utilizaría un comando turn_to_heading en lugar de un comando turn o un comando turn_for.
- Describe el flujo de un proyecto que utiliza un bucle mientras con una condición no con el electroimán para levantar y mover un disco.
¿Por qué usar sensores para resolver el problema del desplazador de discos?
En la lección 2, el robot VR recorrió una distancia específica usando el comando drive_for para recoger y mover un disco azul de regreso al objetivo. La distancia entre el VR Robot y el primer disco azul se estimó y verificó utilizando las dimensiones de los cuadrados de la cuadrícula en el Disk Mover Playground. Si bien esto resolvió el desafío, hay mucho margen de error al duplicar el proceso para recoger varios discos a varias distancias, lo cual es necesario para resolver el Desafío del Desplazador de Discos al final de esta Unidad. El uso de los comentarios de los sensores informados es una forma más eficiente de resolver este desafío, al tiempo que optimiza el proyecto mediante el uso de menos comandos.
¿Qué pasa si el robot VR choca con un disco y se sale de su curso? ¿Qué pasa si los discos están en ubicaciones ligeramente diferentes de la meta? La retroalimentación de los sensores se puede utilizar para recoger y mover discos con precisión sin conocer su ubicación exacta en el Disk Mover Playground.
Los pasos para resolver el desafío se pueden utilizar para ayudar a determinar qué sensores utilizar en el proyecto.
-
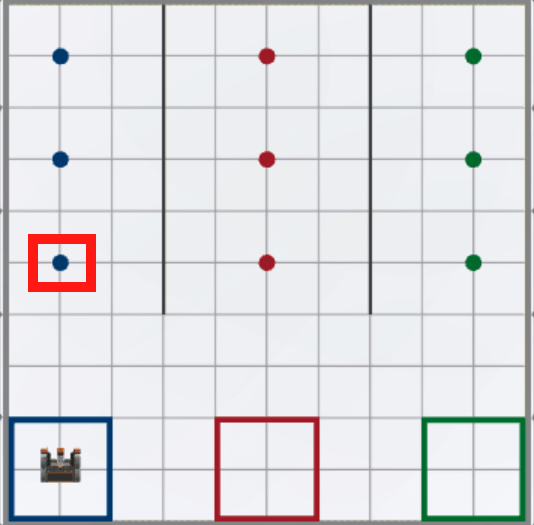
Primero: el robot VR se dirigirá al primer disco.
-
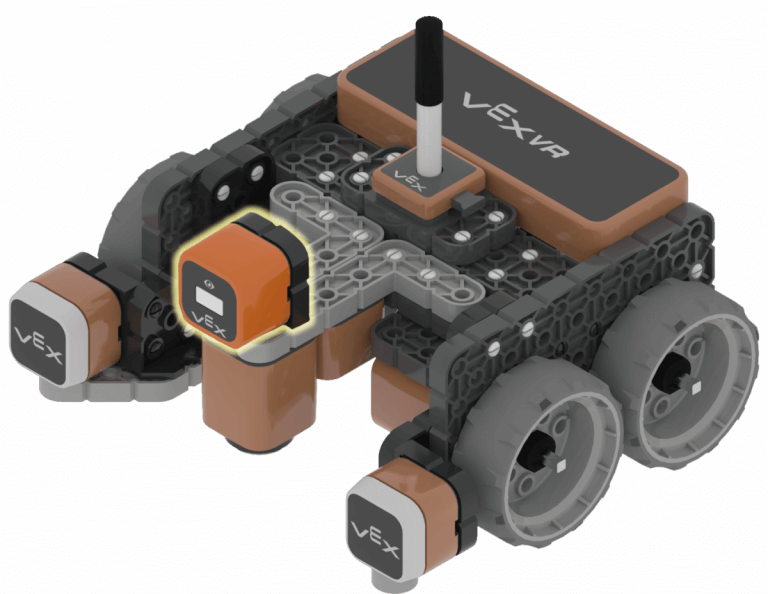
Los discos están en el suelo del patio de recreo. Para determinar dónde se encuentra un disco, el sensor Down Eye se puede utilizar con el comando down_eye.near_object. Observe la posición del sensor ocular inferior en relación con el electroimán en el robot VR.

-
-
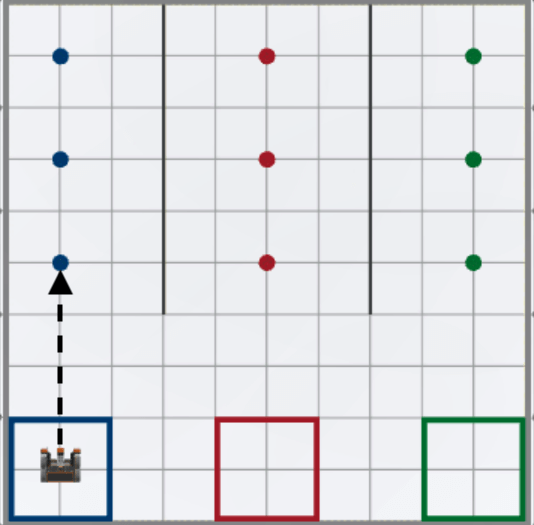
Segundo: El robot VR utilizará el electroimán para recoger el primer disco.

-
Tercero: El robot de realidad virtual volverá a la meta.
-
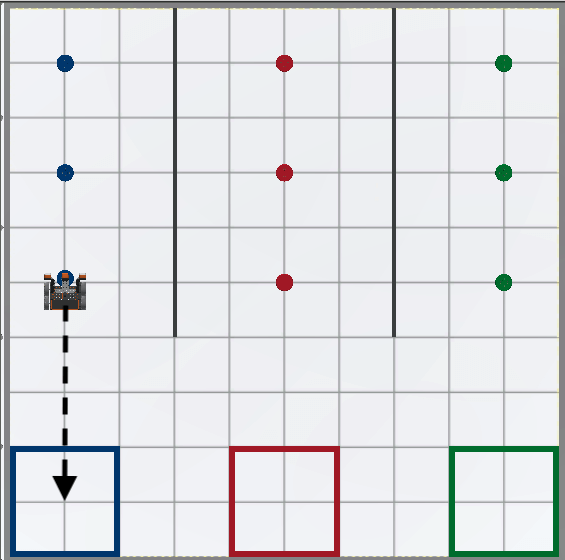
Mientras conduce de regreso a la meta, el robot VR puede usar el sensor de distancia para determinar cuándo dejar de conducir. El sensor de distancia se puede utilizar para determinar qué tan lejos está la parte delantera del robot de realidad virtual de la pared del patio de recreo. Usando el comando get_distance , el sensor de distancia puede moverse y detenerse cuando está a una distancia específica de la pared, posicionando al robot VR en el espacio objetivo.
-
-
Finalmente: el robot VR utilizará el electroimán para colocar el disco en la meta.
Seleccione el botón Siguiente para continuar con el resto de esta lección.