
수업 3: 좌표 집합(Y축)으로의 주행
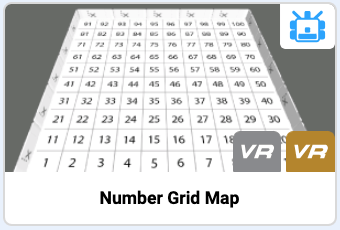
이 수업에서는 위치 센서를 사용하여 VR 로봇을 번 그리드 맵 놀이터의 숫자 '31'로 이동시키는 프로젝트를 만듭니다. 미니 챌린지에서는 이러한 기술을 적용하여 VR 로봇을 숫자 '81'까지 운전한 다음, 돌아서서 숫자 그리드 맵 놀이터의 숫자 '41'에서 멈추게 됩니다!

학습 성과
- 위치 센서의 값이 임계값보다 작은 동안 Y축을 따라 VR 로봇이 구동되는 프로젝트를 만드는 방법을 식별합니다.
- 위치 센서 값이 임계값보다 큰 경우 Y축을 따라 VR 로봇이 구동되는 프로젝트를 만드는 방법을 식별합니다.
- 숫자 그리드 맵 놀이터에서 숫자의 X, Y 좌표를 식별하세요.
- 사용자가 프로젝트를 설명하는 데 도움이 되는 정보를 작성할 수 있도록 댓글을 사용한다는 점을 확인합니다.
- 프로젝트에 댓글을 추가하는 방법을 식별합니다.
- 프로젝트에서 코멘트를 사용해야 하는 이유와 방법을 설명하세요.
프로젝트 이름 지정 및 저장
-
새로운 텍스트 프로젝트를 시작하고 메시지가 표시되면 숫자 그리드 맵 놀이터선택합니다.
- 프로젝트 이름을 Unit6Lesson3로 지정하세요.

이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.