
놀다
1부 - 단계별 설명
- 지시학생들에게 코드베이스를 위한 프로젝트를 만들어 두 개의 샘플을 수집하고 묻도록 지시합니다. 학생들에게 코드 베이스는 한 번에 하나의 샘플만 운반할 수 있으므로 로봇이 샘플을 채취하기 위해 출발하고 베이스로 두 번 돌아오도록 코드를 작성해야 한다는 점을 상기시켜 주세요. 학생들은 두 개의 샘플과 과제를 달성하는 데 필요한 모든 경로를 선택할 수 있으므로, 그들의 프로젝트는 모두 다를 것입니다. 아래는 예시 솔루션의 비디오입니다.
다음 애니메이션에서는 로봇이 두 칸 앞으로 이동한 후 왼쪽으로 90도 회전하고, 다시 한 칸 더 앞으로 이동하여 빨간색 샘플을 수집합니다. 그런 다음, 붉은색 샘플을 수집한 후 기지로 돌아오기 위해 로봇은 180도 회전하고, 한 칸 앞으로 이동한 다음 오른쪽으로 90도 회전하고, 두 칸 앞으로 이동합니다. 다음으로 파란색 샘플을 수집하기 위해 로봇은 오른쪽으로 90도 회전하고 한 칸 앞으로 이동합니다. 파란색 샘플을 수집한 후 기지로 돌아가려면 로봇은 한 칸 뒤로 이동합니다.
비디오 파일- 학생들에게 1번 랩에서 배운 블록을 사용하여 프로젝트를 만들도록 지시합니다. 학생들과 함께 코드 베이스가 각 샘플을 수집하고 매장하기 위해 완료해야 하는 단계를 파악합니다. These steps are also listed in the Lab 2 Image Slideshow (Google / .pptx / .pdf) for students to reference while they build their projects.
- 샘플 위치로 운전하세요.
- LED 범퍼 센서가 3초간 빨간색으로 빛나면 샘플 수집이 진행 중임을 보여줍니다.
- LED 범퍼 센서는 샘플이 수집되었음을 나타내기 위해 3초 후에 꺼집니다.
- 기지로 복귀하세요.
- LED 범퍼 센서가 3초간 빨간색으로 빛나면 샘플이 묻히고 있음을 보여줍니다.
- LED 범퍼 센서는 샘플이 묻혔음을 보여주기 위해 3초 후에 꺼집니다.
-
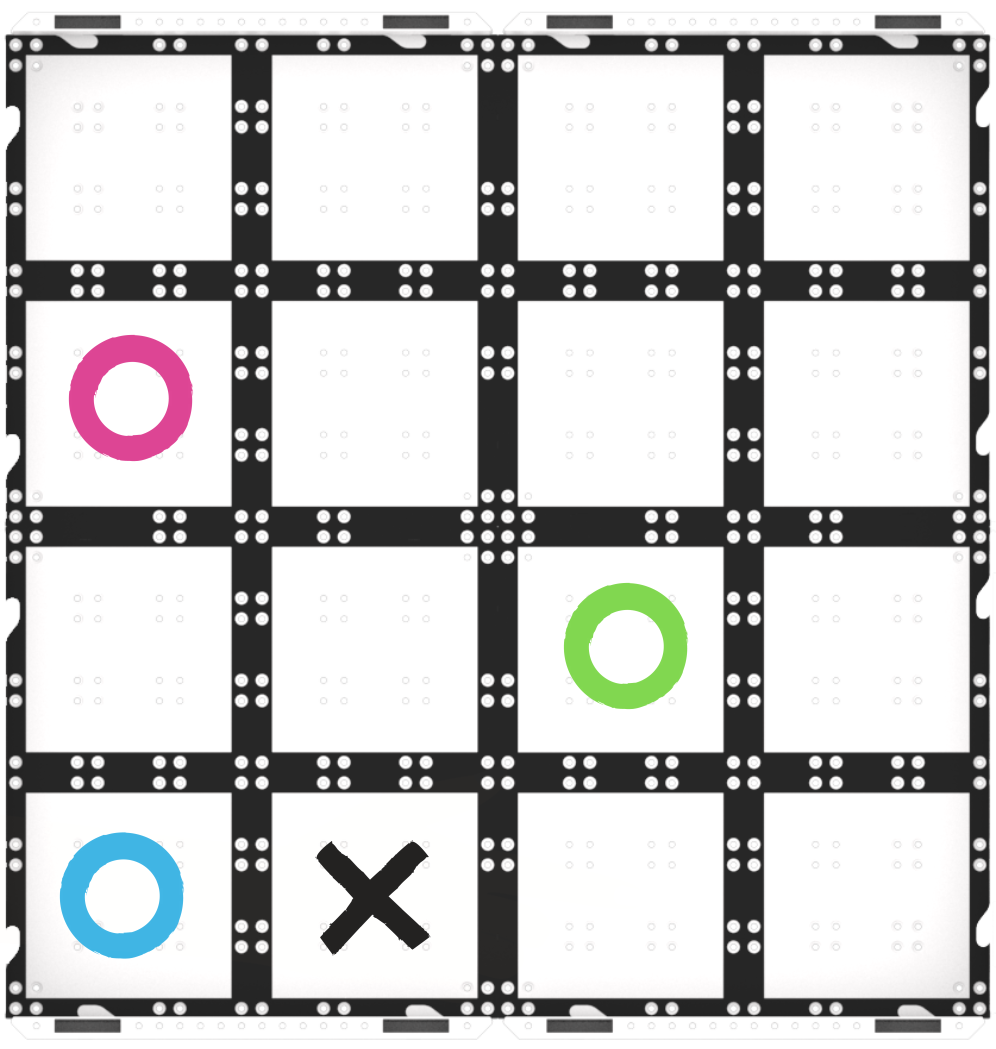
학생들에게 현장에서 로봇을 어디에 두어야 할지 보여줍니다. 학생들은 항상 'X'에서 시작해야 하지만, 프로젝트에 가장 적합한 방식으로 코드 베이스를 조정할 수 있습니다. 일부 학생은 로봇을 필드에 배치할 때 먼저 파란색 원으로 이동한 다음 코드 베이스가 해당 위치를 향하도록 방향을 조정할 수도 있습니다.
필드 설정
- 학생들에게 1번 랩에서 배운 블록을 사용하여 프로젝트를 만들도록 지시합니다. 학생들과 함께 코드 베이스가 각 샘플을 수집하고 매장하기 위해 완료해야 하는 단계를 파악합니다. These steps are also listed in the Lab 2 Image Slideshow (Google / .pptx / .pdf) for students to reference while they build their projects.
- 모델VEXcode GO에서 학생들이 코드 베이스를 구성하고 장치에 연결하는 방법을 알려주는 모델입니다.
- 먼저, 학생들에게 VEXcode GO에서 코드 베이스의 Brain을 장치에 연결하는 방법을 보여줍니다. Because connection steps vary between devices, see the Connecting articles of the VEXcode GO VEX Library for specific steps to connect the VEX GO Brain to your computer or tablet.
- 또한 코드 베이스에 대해 VEXcode GO를 구성해야 합니다. If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
VEXcode GO에서 학생들이 프로젝트의 이름을 지정하고, 저장하고, 테스트하는 방법을 보여주는 모델입니다.
- 학생들이 프로젝트를 만든 후, 프로젝트 이름을 수집 및 묻기 2로 지정하고 장치에 저장하게 합니다. See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
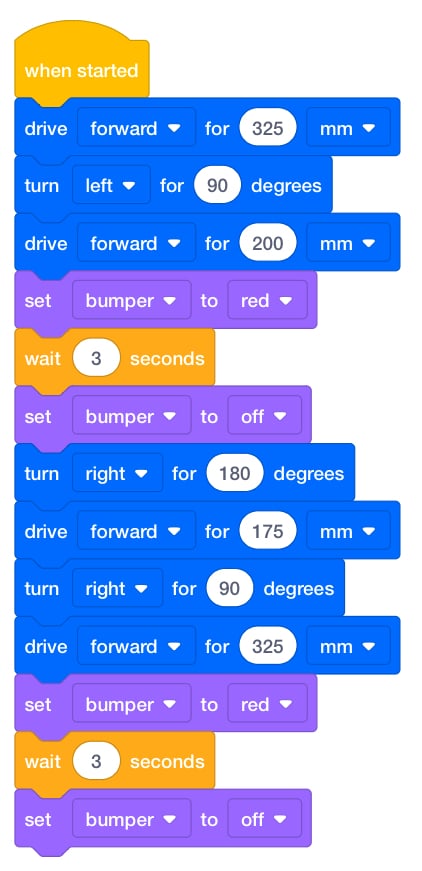
- Engage 솔루션을 사용하여 프로젝트 코딩을 시작하는 전략으로 모델링할 수 있습니다. Engage 프로젝트를 기반으로 사용하는 경우 VEXcode GO에서 아래 코드를 다시 만들고 프로젝트를 테스트하여 두 번째 샘플을 수집하고 저장하기 위해 어떤 블록을 추가해야 하는지 확인하세요.
프로젝트 참여 - 코드 베이스를 필드에 배치한 후, 학생들이 VEXcode GO에서 '시작'을 선택하여 프로젝트를 테스트하도록 합니다.
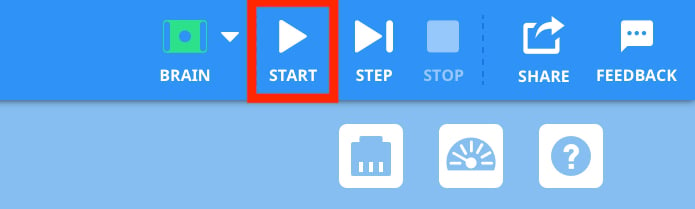
프로젝트 테스트를 위해 시작을 선택하세요 - 코드 베이스가 각 샘플 위치에 도달하면 LED 범퍼 센서가 빨간색으로 빛날 때 학생들은 '샘플'을 로봇 위에 올려놓아야 합니다. 로봇이 기지로 돌아온 후, 학생들은 코드 베이스 위쪽에서 샘플을 제거해야 합니다(LED 범퍼 센서가 다시 빨간색으로 켜질 때). 이는 샘플이 묻혔다는 것을 나타내기 위해서입니다.
-
프로젝트 실행이 끝나면 학생들은 도구 모음에서 '중지' 버튼을 선택해야 합니다.

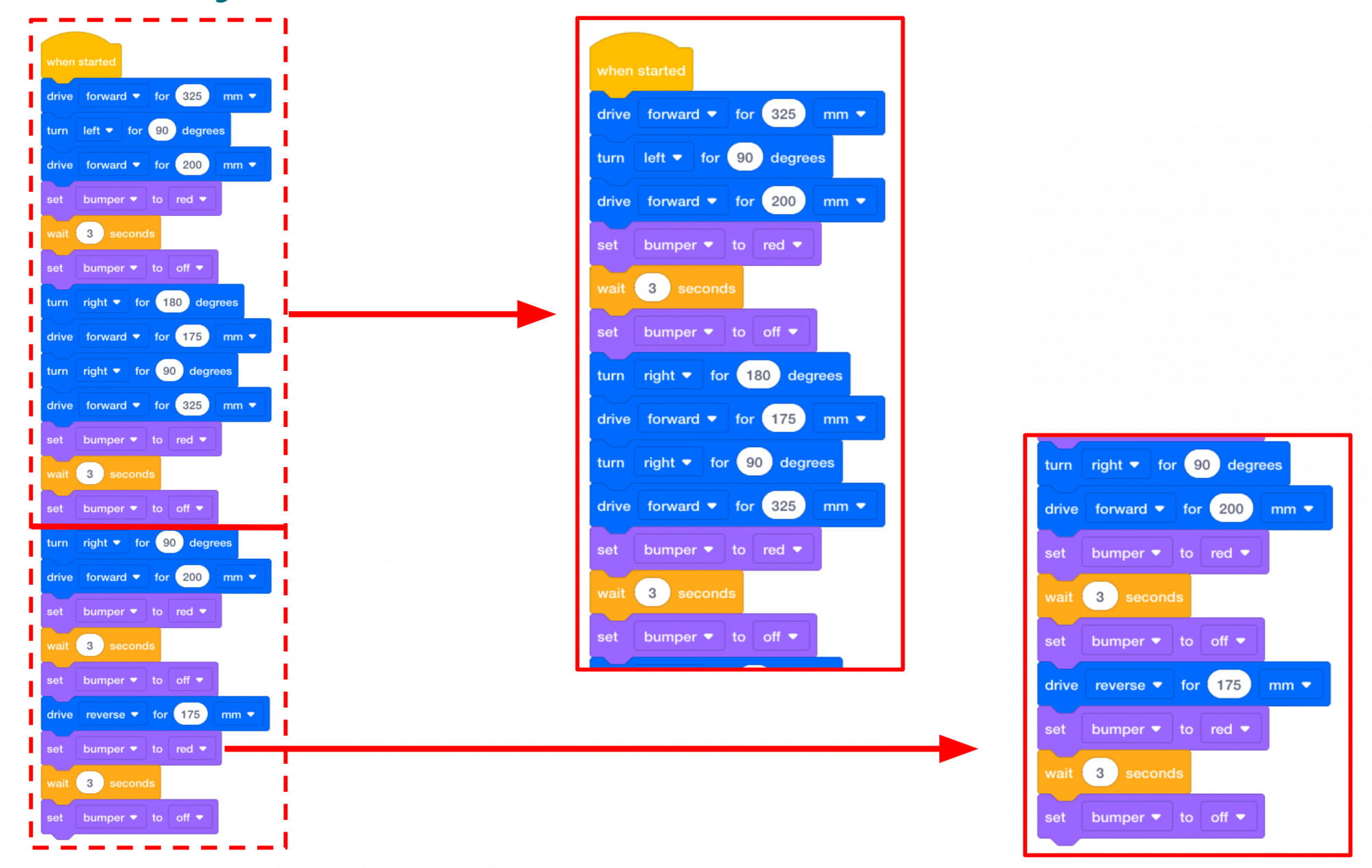
정지 선택 - 두 개의 샘플을 수집하여 매장하는 것에 대한 가능한 해결책은 다음과 같습니다. 학생들과 함께 두 개의 샘플을 수집하기 위한 프로젝트 구축을 모델링하거나 촉진할 때 이것을 참고자료로 사용할 수 있습니다.
가능한 플레이 파트 1 솔루션 프로젝트를 일찍 완료한 그룹의 경우, 동일한 두 샘플을 수집하기 위해 코드 베이스 경로를 변경하도록 과제를 부여합니다. 두 개의 샘플을 수집하고 매장하기 위해 얼마나 많은 다른 경로를 코딩할 수 있을까?
- 촉진학생들이 프로젝트를 만들고 테스트하는 동안 대화를 촉진합니다. 그룹은 첫 번째 시도에서 프로젝트를 정확하게 완성하지 못할 가능성이 높습니다. 코드 베이스에서 두 개의 샘플을 수집하여 저장할 수 있을 때까지 VEXcode GO 프로젝트를 편집하고 다시 테스트하게 합니다.
- 어떤 샘플 두 개를 수집할 계획인가요? 어떤 순서로?
- 첫 번째 샘플로 이동하려면 코드 베이스를 어떻게 옮겨야 합니까? 두 번째는?
- [Turn for] 블록을 90도에서 180도로 변경하면 코드 베이스는 어떻게 이동할까요? 손으로 보여주실 수 있나요?
- 상기시키기학생들에게 블록의 순서(또는 시퀀스)와 각 블록에 설정된 매개변수를 확인하도록 상기시킵니다. 코드 베이스가 왼쪽이 아닌 오른쪽으로 돌아갔나요? 샘플이 더 멀리 있었나요? [Drive for] 블록에서 매개변수를 변경하여 코드 베이스가 이동할 적절한 거리를 찾으려면 어떻게 해야 합니까?
교실을 돌면서 학생들에게 각 문제를 해결하는 방법을 알려주십시오. 이는 반복적인 과정이므로, 화성 탐사선을 코딩하는 과학자도 탐사선이 의도한 대로 움직이도록 하기 위해 여러 번 시도해야 한다는 점을 학생들에게 상기시켜 주세요.
- 질문학생들에게 과학자들이 어떤 지역을 연구하는 데 도움이 되는 로버를 보낼 수 있는 다른 장소에 대해 질문합니다. 달에 로버가 유용할까요? 화산 속? 수중? 왜 그럴까? 혹은 왜 그렇지 않을까?
중간 휴식 & 그룹 토론
모든 그룹 이 샘플개를 수집하고 묻는 프로젝트를 만들면, 간단한 대화를 나누기 함께 모이세요.
- 여러분의 그룹은 어떻게 협력하여 프로젝트를 구축했나요?
- 제스처와 단어를 사용하여 코드베이스가 첫 번째 샘플을 수집하고 저장하는 데 어떻게 움직였는지 말해 줄 수 있습니까?
- 귀하의 그룹은 다음에 어떤 샘플을 탐색하기로 선택했습니까? 코드베이스는 어떻게 두 번째 샘플을 수집하고 매장하게 되었나요?
2부 - 단계별
- 지시학생들에게 연극 1부 프로젝트에 총 3개의 샘플을 수집하고 묻는 과제를 추가하도록 지시합니다. 학생들에게 코드 베이스는 한 번에 하나의 샘플만 운반할 수 있으므로 로봇에 코드를 입력하여 샘플을 채취하기 위해 출발하고 베이스로 세 번 돌아오도록 해야 한다는 점을 상기시켜 주세요. 학생들이 원하는 순서로 샘플을 수집할 수 있기 때문에, 그들이 진행하는 프로젝트도 모두 달라질 것입니다. 아래는 이 과제에 대한 가능한 해결책 중 하나를 보여주는 애니메이션입니다.
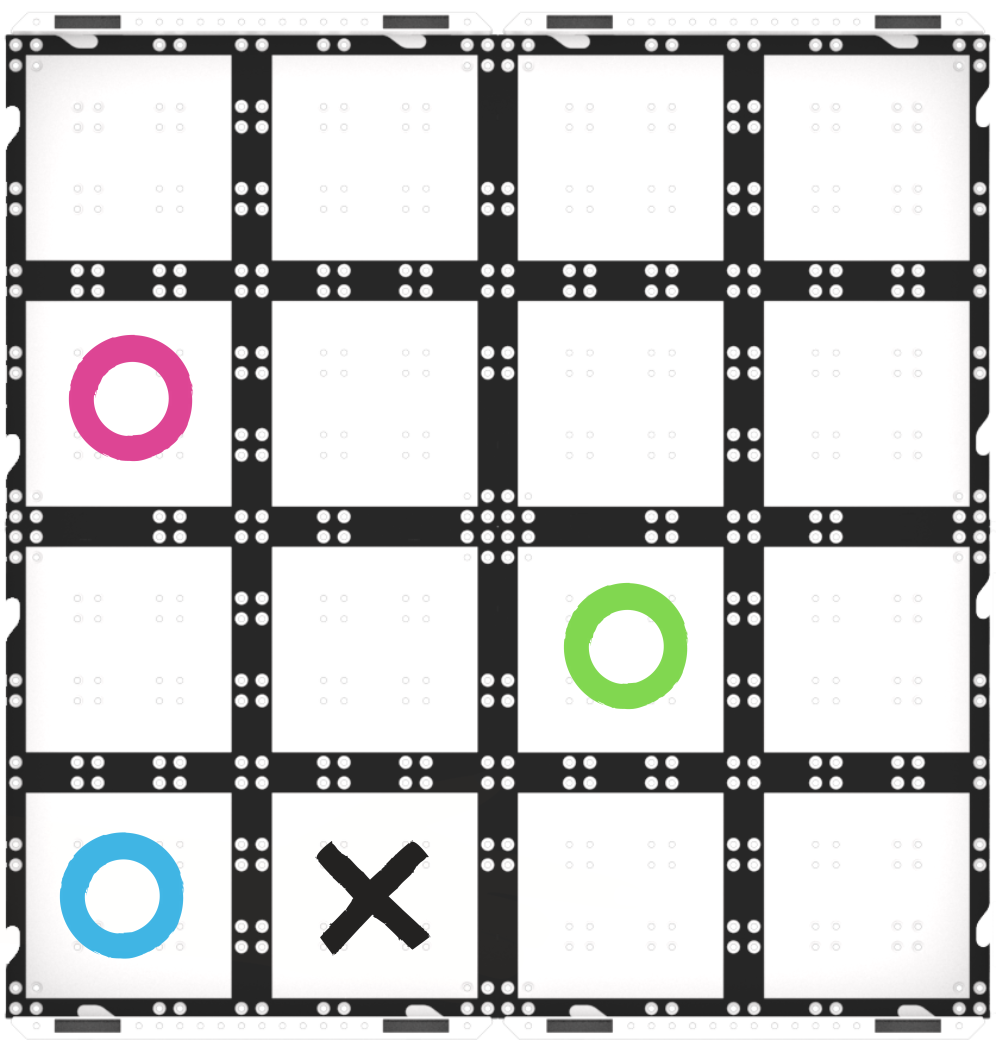
다음 애니메이션에서는 로봇이 두 칸 앞으로 이동한 후 왼쪽으로 90도 회전하고, 다시 한 칸 더 앞으로 이동하여 빨간색 샘플을 수집합니다. 그런 다음, 붉은색 샘플을 수집한 후 기지로 돌아오기 위해 로봇은 180도 회전하고, 한 칸 앞으로 이동한 다음 오른쪽으로 90도 회전하고, 두 칸 앞으로 이동합니다. 다음으로 파란색 샘플을 수집하기 위해 로봇은 오른쪽으로 90도 회전하고 한 칸 앞으로 이동합니다. 파란색 샘플을 수집한 후 기지로 돌아가려면 로봇은 한 칸 뒤로 이동합니다. 다음으로, 녹색 샘플을 수집하기 위해 로봇은 한 칸 더 뒤로 이동한 다음 오른쪽으로 90도 회전하고, 다시 한 칸 앞으로 이동합니다. 마지막으로, 기지로 돌아가려면 로봇은 오른쪽으로 180도 회전하고, 한 칸 앞으로 이동한 다음 오른쪽으로 90도 회전하고, 다시 한 칸 앞으로 이동합니다.
비디오 파일 - 모델학생들이 세 번째 샘플을 수집하기 위해 프로젝트를 어떻게 구축할 것인지에 대한 모델입니다. 학생들이 스스로 도전과제를 완수할 수도 있습니다. 하지만 어린 학생이라면 학급 전체로 프로젝트를 함께 구성하는 게 좋을 수도 있습니다. 여러분이 프로젝트를 함께 구축하는 경우 아래 단계를 따르세요.
- If students need to open their Collect and Bury 2 projects from Play Part 1, model the device-specific steps to open a project, as shown in the VEX Library articles in the Open and Save section.
- 학생들은 프로젝트 바닥에 블록을 추가하여 세 번째 샘플을 모아 묻을 수 있습니다. 학생들에게 코드 베이스가 각 샘플을 수집하고 매장하기 위해 완료해야 하는 단계를 상기시킵니다.
- These steps are also listed in the Lab 2 Image Slideshow (Google / .pptx / .pdf) for students to reference while they build their projects.
- 샘플 위치로 운전하세요.
- LED 범퍼 센서가 3초간 빨간색으로 빛나면 샘플 수집이 진행 중임을 보여줍니다.
- LED 범퍼 센서는 샘플이 수집되었음을 나타내기 위해 3초 후에 꺼집니다.
- 기지로 복귀하세요.
- LED 범퍼 센서가 3초간 빨간색으로 빛나면 샘플이 묻히고 있음을 보여줍니다.
- LED 범퍼 센서는 샘플이 묻혔음을 보여주기 위해 3초 후에 꺼집니다.
- 학생들이 프로젝트를 만든 후, 프로젝트 이름을 수집 및 묻기 3 로 지정하고 장치에 저장하게 합니다. See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
- 학생들이 현장에서 코드 베이스를 배치할 위치에 대한 모델입니다. 학생들은 항상 'X'에서 시작해야 하지만, 프로젝트에 가장 적합한 방식으로 코드 베이스를 조정할 수 있습니다. 일부 학생은 로봇을 필드에 배치할 때 먼저 파란색 원으로 이동한 다음 코드 베이스가 해당 위치를 향하도록 방향을 조정할 수도 있습니다.
필드 설정 - 코드 베이스를 필드에 배치한 후 학생들이 VEXcode GO에서 시작을 선택하여 프로젝트를 테스트하도록 합니다.
프로젝트 테스트를 위해 시작을 선택하세요 - 코드 베이스가 각 샘플 위치에 도착하면 학생들은 자신의 '샘플'을 로봇 위에 올려놓아야 합니다. 코드 베이스가 기지로 돌아온 후, 학생들은 로봇 위쪽에서 샘플을 제거하여 샘플이 묻혔음을 나타내야 합니다.
- 프로젝트 실행이 끝나면 학생들에게 도구 모음에서 '중지' 버튼을 선택하라고 상기시킵니다.
정지선택 - 세 개의 샘플을 수집하여 매장하는 것에 대한 가능한 해결책 중 하나는 다음과 같습니다.

가능한 플레이 파트 1 솔루션 - 프로젝트를 일찍 완료한 그룹의 경우 코드 베이스 경로를 변경하여 다른 순서로 샘플을 수집하도록 과제를 부여하세요. 이 새로운 프로젝트는 원래 코드와 어떻게 비교되나요? 비슷한 점이나 다른 점은 무엇인가요?
- 촉진학생들이 과제를 완수하는 동안 대화를 촉진합니다.
- 세 번째 샘플을 수집하고 저장하기 위해 코드 베이스는 어떻게 이동해야 합니까? 손으로 보여주세요.
- 세 번째 샘플을 수집하는 코드를 만드는 것이 처음 두 샘플을 수집하는 것보다 쉽거나 더 어렵습니까? 왜?
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for additional information on the LED Bumper.
- 상기시키기학생들에게 다른 그룹과 필드를 공유해야 할 수도 있다는 점을 상기시킵니다. 학생들이 프로젝트를 테스트한 후에는 다른 학생들이 테스트할 수 있도록 로봇을 현장에서 꺼내야 합니다.
- 성공적인 프로젝트를 만들려면 그룹은 코드를 여러 번 테스트해야 합니다. 블록 순서와 각 블록의 매개변수를 확인하여 코드 베이스가 올바른 거리만큼 주행하고 회전하는지, LED 범퍼가 올바른 시간 동안 빛나는지 확인하도록 상기시킵니다.
-
교대근무에 문제가 있나요? 각 그룹에 작은 색깔 깃발이나 색종이 조각을 나눠 주어 컴퓨터 책상에 두도록 하세요. 코딩하는 동안 노란색 깃발을 내걸어야 합니다. 시험할 준비가 되면 녹색 깃발을 내걸 수 있다. 그룹이 녹색 플래그를 올리면 테스트할 필드를 할당합니다. 프로젝트가 완료되고 올바르다고 생각되면 별이 달린 깃발을 걸 수 있죠!
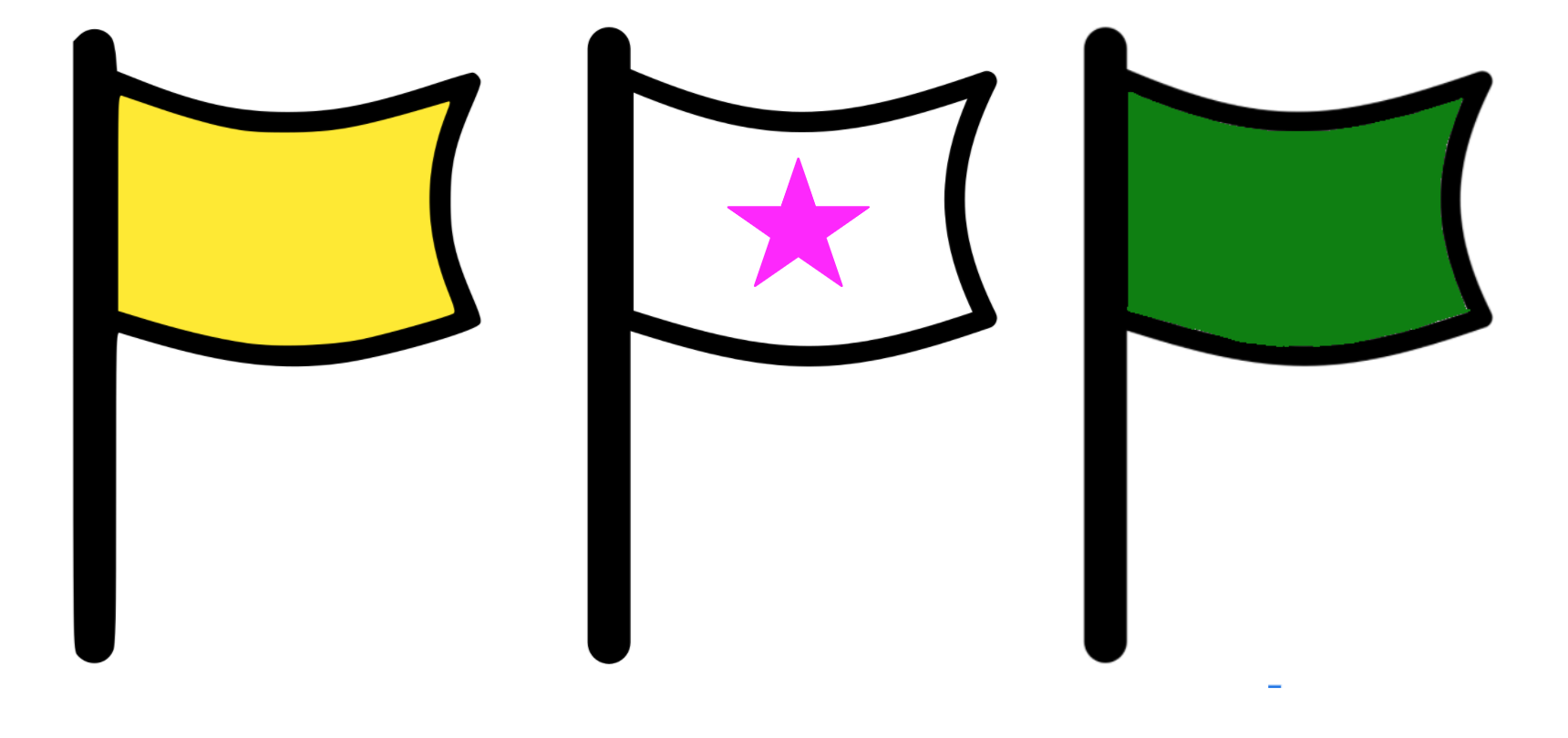
테스트 준비 완료!
- 질문학생들에게 화성 탐사선에 대해 질문하여 프로젝트를 실제 탐사선과 연결해 보세요. 그들은 탐사선이 샘플을 묻을 수 있는 어떤 도구를 가지고 있다고 생각할까? 그들은 미래의 로버가 이 로버가 묻은 샘플을 어떻게 찾아서 발굴할 수 있다고 생각할까?