
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนว่าพวกเขาจะได้รับความท้าทายในการสร้างโครงการสำหรับ Code Base เพื่อรวบรวมและฝังตัวอย่างสองตัวอย่าง เตือนนักเรียนว่าฐานโค้ดสามารถบรรทุกตัวอย่างได้ครั้งละหนึ่งตัวอย่าง ดังนั้นพวกเขาจะต้องเขียนโค้ดให้หุ่นยนต์ขับออกไปเก็บตัวอย่างและกลับมาที่ฐานสองครั้ง เนื่องจากนักเรียนสามารถเลือกตัวอย่างสองตัวอย่างและเส้นทางใดๆ ก็ได้ที่จะบรรลุงาน โปรเจ็กต์ของพวกเขาจึงแตกต่างกัน ด้านล่างนี้เป็นวิดีโอตัวอย่างวิธีแก้ปัญหา
ไฟล์วีดีโอ
- สั่งให้นักเรียนใช้บล็อคที่เรียนรู้ไปแล้วในห้องปฏิบัติการที่ 1 เพื่อสร้างโครงการของตน ระบุกับนักเรียนถึงขั้นตอนที่ฐานโค้ดจำเป็นต้องทำเพื่อรวบรวมและฝังตัวอย่างแต่ละตัวอย่าง These steps are also listed in the Lab 2 ภาพสไลด์โชว์ (Google / .pptx / .pdf) for students to reference while they build their projects.
- ขับรถไปยังสถานที่ตัวอย่าง
- เซ็นเซอร์กันชน LED จะเรืองแสงสีแดงเป็นเวลา 3 วินาที เพื่อแสดงว่ากำลังมีการรวบรวมตัวอย่าง
- เซ็นเซอร์กันชน LED จะส่องแสงดับลงหลังจาก 3 วินาที เพื่อแสดงว่าได้เก็บตัวอย่างเรียบร้อยแล้ว
- กลับเข้าสู่ฐาน
- เซ็นเซอร์กันชน LED จะเรืองแสงสีแดงเป็นเวลา 3 วินาที เพื่อแสดงว่าตัวอย่างกำลังถูกฝังอยู่
- เซ็นเซอร์กันชน LED จะส่องแสงดับลงหลังจาก 3 วินาที เพื่อแสดงว่าตัวอย่างถูกฝังไว้แล้ว
-
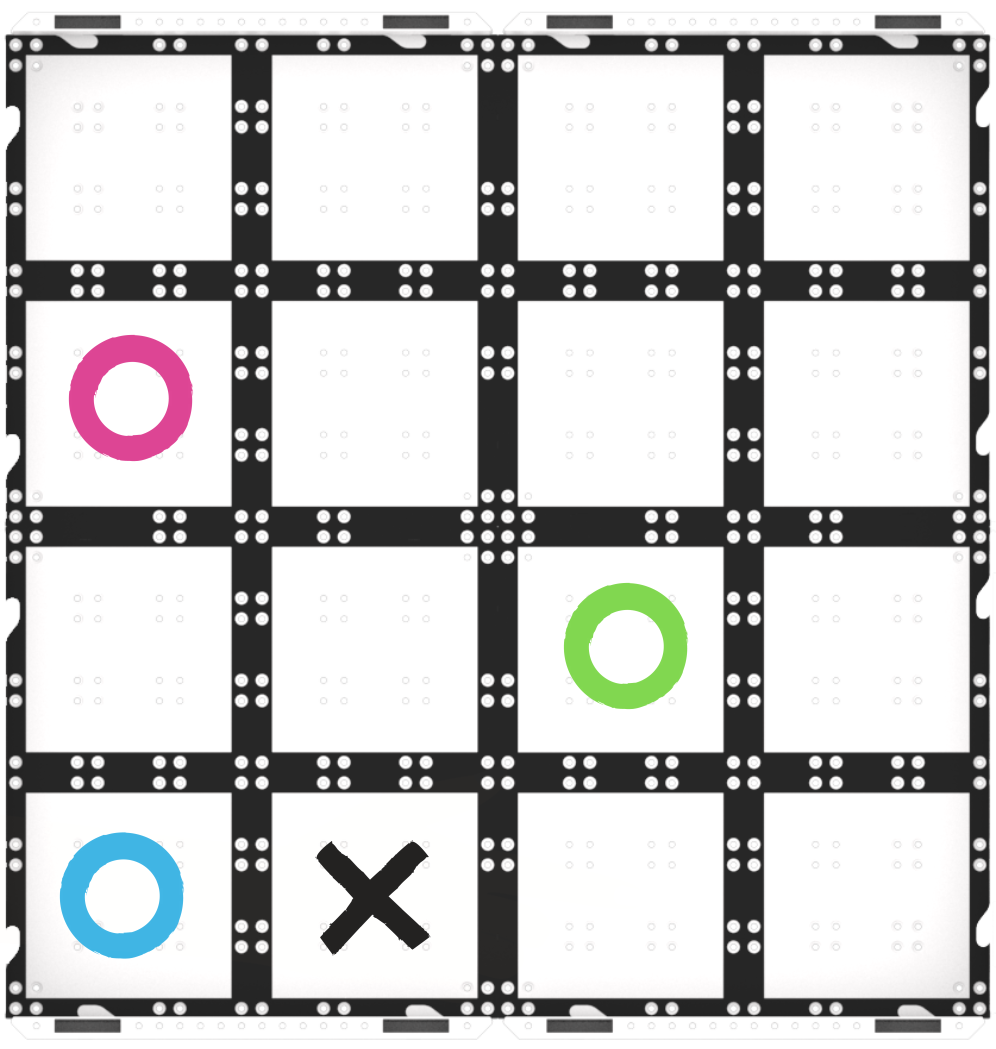
แสดงให้เด็กนักเรียนเห็นว่าควรวางหุ่นยนต์ไว้ตรงไหนในสนาม นักเรียนควรเริ่มจาก "X" เสมอ แต่สามารถปรับฐานโค้ดให้เหมาะกับโครงการของตนได้ นักเรียนบางคนอาจเลือกที่จะนำทางไปที่วงกลมสีน้ำเงินก่อนแล้วจึงปรับฐานโค้ดให้หันไปทางตำแหน่งนั้นเมื่อวางหุ่นยนต์บนสนาม
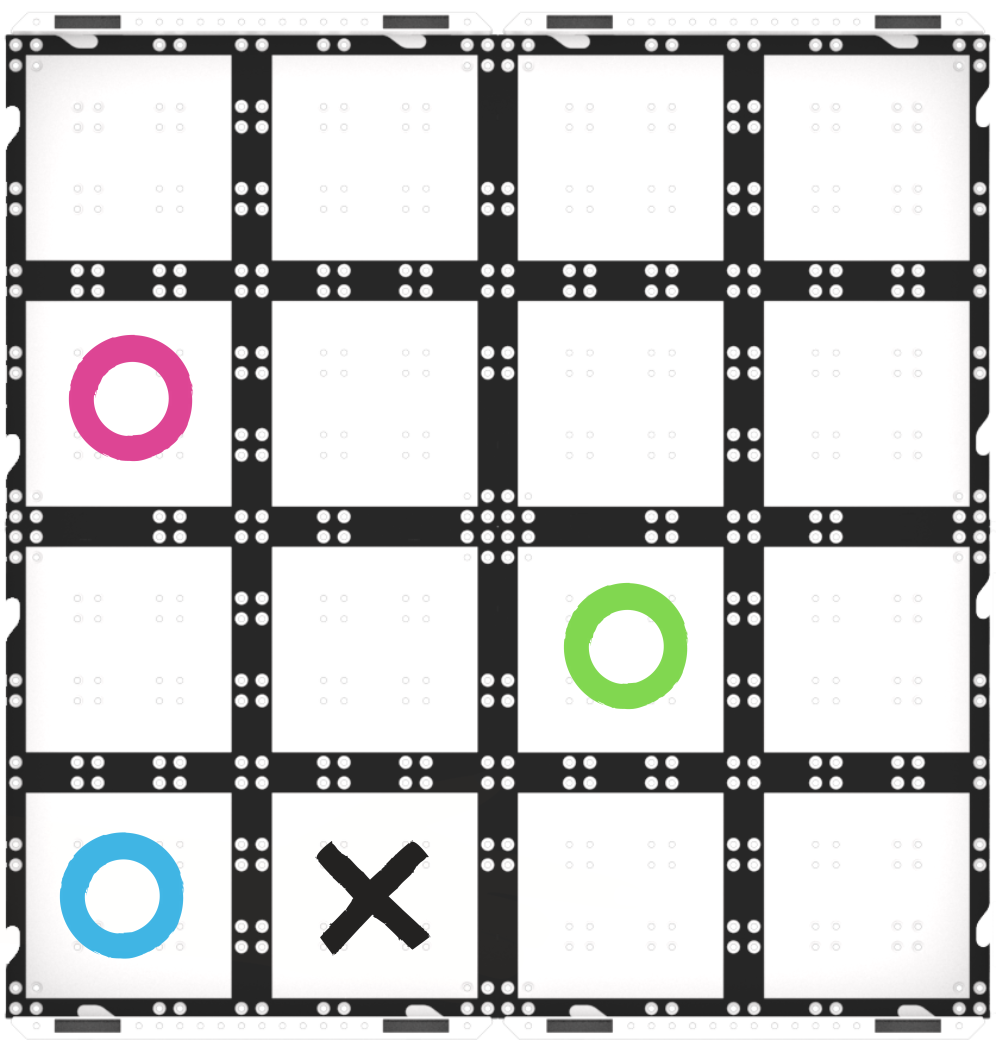
การตั้งค่าภาคสนาม
- สั่งให้นักเรียนใช้บล็อคที่เรียนรู้ไปแล้วในห้องปฏิบัติการที่ 1 เพื่อสร้างโครงการของตน ระบุกับนักเรียนถึงขั้นตอนที่ฐานโค้ดจำเป็นต้องทำเพื่อรวบรวมและฝังตัวอย่างแต่ละตัวอย่าง These steps are also listed in the Lab 2 ภาพสไลด์โชว์ (Google / .pptx / .pdf) for students to reference while they build their projects.
- แบบจำลอง แบบจำลองสำหรับนักเรียนในการกำหนดค่าและเชื่อมต่อ Code Base เข้ากับอุปกรณ์ใน VEXcode GO
- เริ่มต้นด้วยการแสดงให้ผู้เรียนเห็นถึงวิธีการเชื่อมต่อ Brain บน Code Base ของพวกเขาเข้ากับอุปกรณ์ใน VEXcode GO เนื่องจากขั้นตอนการเชื่อมต่อจะแตกต่างกันไปตามอุปกรณ์ต่างๆ, see the Connecting articles of the VEXcode GO VEX Library สำหรับขั้นตอนเฉพาะในการเชื่อมต่อ VEX GO Brain กับคอมพิวเตอร์หรือแท็บเล็ตของคุณ.
- พวกเขายังต้องกำหนดค่า VEXcode GO สำหรับ Code Base ด้วย If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
แบบจำลองสำหรับนักเรียนในการตั้งชื่อ บันทึก และทดสอบโครงการของตนใน VEXcode GO
- หลังจากที่นักเรียนสร้างโครงการของตนเสร็จแล้ว ให้ตั้งชื่อโครงการเป็น รวบรวมและฝัง 2และบันทึกลงในอุปกรณ์ของตน See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
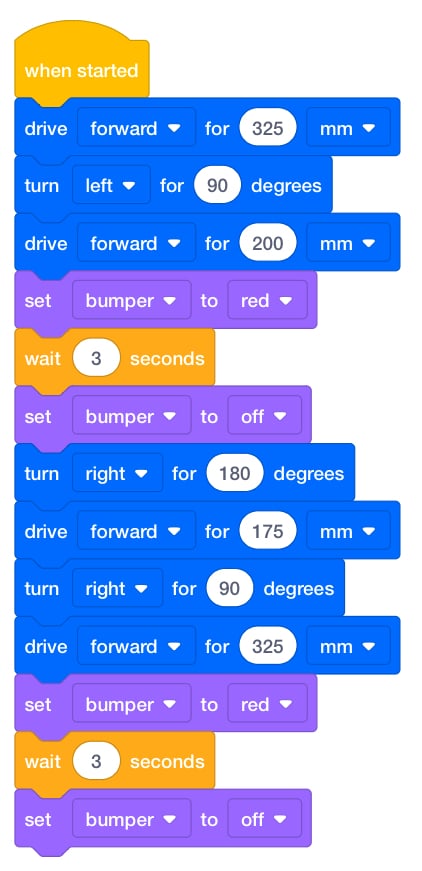
- คุณสามารถสร้างแบบจำลองโดยใช้โซลูชัน Engage เป็นกลยุทธ์ในการเริ่มเขียนโค้ดโครงการ หากใช้โครงการ Engage เป็นฐาน ให้สร้างโค้ดด้านล่างใหม่ใน VEXcode GO และทดสอบโครงการเพื่อดูว่าต้องเพิ่มบล็อกใดเพื่อรวบรวมและฝังตัวอย่างที่สอง
ร่วมโครงการ - เมื่อวางฐานโค้ดลงบนสนามแล้ว ให้ให้ผู้เรียนเลือก "เริ่ม" ใน VEXcode GO เพื่อทดสอบโครงการของพวกเขา
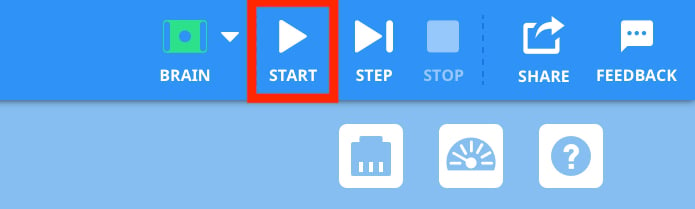
เลือกเริ่มเพื่อทดสอบโครงการ - เมื่อฐานโค้ดไปถึงตำแหน่งตัวอย่างแต่ละตำแหน่ง นักเรียนควรวาง "ตัวอย่าง" ของตนไว้ด้านบนของหุ่นยนต์เมื่อเซ็นเซอร์กันชน LED เรืองแสงสีแดง หลังจากที่หุ่นยนต์กลับมาที่ฐานแล้ว นักเรียนควรเอาตัวอย่างออกจากด้านบนของฐานโค้ด (เมื่อเซ็นเซอร์กันชน LED เรืองแสงสีแดงอีกครั้ง) เพื่อระบุว่าตัวอย่างถูกฝังไว้แล้ว
-
หลังจากที่โครงการเสร็จสิ้นการดำเนินโครงการ นักเรียนควรเลือกปุ่ม 'หยุด' ในแถบเครื่องมือ

เลือกหยุด - ต่อไปนี้เป็นวิธีแก้ปัญหาที่เป็นไปได้เพียงวิธีเดียวในการรวบรวมและฝังตัวอย่างสองตัวอย่าง คุณสามารถใช้สิ่งนี้เป็นข้อมูลอ้างอิงเมื่อสร้างแบบจำลองหรืออำนวยความสะดวกในการจัดโครงการเพื่อรวบรวมตัวอย่างสองตัวอย่างกับนักเรียนของคุณ
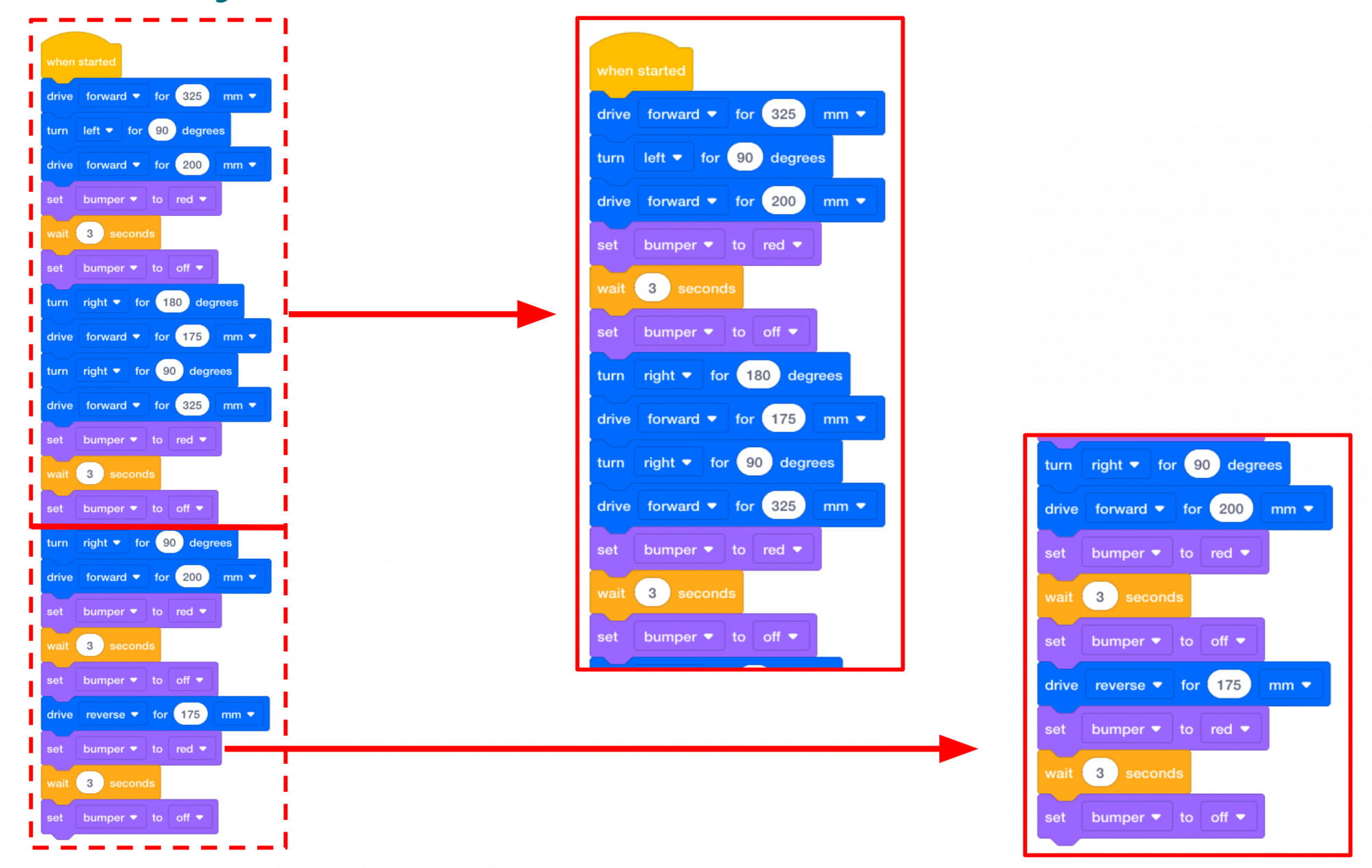
การเล่นที่เป็นไปได้ ส่วนที่ 1 วิธีแก้ปัญหา สำหรับกลุ่มที่ดำเนินโครงการเสร็จก่อนกำหนด ให้ท้าทายพวกเขาให้เปลี่ยนเส้นทางของฐานโค้ดเพื่อเก็บตัวอย่างทั้งสองชุดเดียวกัน พวกเขาสามารถเข้ารหัสเส้นทางที่แตกต่างกันได้กี่เส้นทางเพื่อรวบรวมและฝังตัวอย่างทั้งสองตัวอย่าง?
- อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนในขณะที่พวกเขาสร้างและทดสอบโครงการของพวกเขา กลุ่มต่างๆ มีแนวโน้มว่าจะไม่สามารถทำโครงการของตนได้ถูกต้องตั้งแต่ครั้งแรก ให้พวกเขาแก้ไขและทดสอบโครงการ VEXcode GO ของพวกเขาอีกครั้งจนกว่าฐานโค้ดจะสามารถรวบรวมและฝังตัวอย่างทั้งสองตัวอย่างได้
- คุณวางแผนที่จะรวบรวมตัวอย่างสองตัวอย่างไหน? ตามลำดับอย่างไร?
- ฐานโค้ดจะต้องเคลื่อนที่อย่างไรเพื่อขับเคลื่อนไปยังตัวอย่างแรก? ที่สองหรอ?
- หากคุณเปลี่ยนบล็อก [Turn for] จาก 90 องศาเป็น 180 องศา ฐานโค้ดจะเคลื่อนไหวอย่างไร คุณช่วยแสดงมือให้ฉันดูได้ไหม?
- เตือนเตือนนักเรียนให้ตรวจสอบลำดับ (หรือบล็อก) และพารามิเตอร์ที่ตั้งค่าไว้ในแต่ละบล็อก ฐานโค้ดเลี้ยวขวาแทนที่จะเป็นซ้ายใช่ไหม? ตัวอย่างนั้นอยู่ไกลออกไปหรือเปล่า? คุณจะเปลี่ยนพารามิเตอร์ในบล็อก [Drive for] เพื่อค้นหาระยะทางที่เหมาะสมในการเดินทางของ Code Base ได้อย่างไร
พูดคุยกับนักเรียนเกี่ยวกับการแก้ไขปัญหาในแต่ละประเด็นในขณะที่คุณเดินวนรอบห้องเรียน นี่จะเป็นกระบวนการแบบวนซ้ำ ดังนั้น โปรดเตือนนักเรียนว่านักวิทยาศาสตร์ที่เขียนโค้ดรถสำรวจดาวอังคารจะต้องพยายามหลายครั้งเพื่อให้รถสำรวจเคลื่อนที่ไปตามที่ตั้งใจไว้
- ถามถามนักเรียนเกี่ยวกับสถานที่อื่นๆ ที่รถสำรวจอาจถูกส่งไปช่วยนักวิทยาศาสตร์ศึกษาพื้นที่ ยานสำรวจจะมีประโยชน์บนดวงจันทร์ไหม? ข้างในภูเขาไฟเหรอ? ใต้น้ำหรอ? ทำไมหรือทำไมไม่?
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
ทันทีที่กลุ่ม แต่ละกลุ่มสร้างโครงการเพื่อรวบรวมและฝังตัวอย่าง 2 ชิ้นมารวมกันเพื่อสนทนาสั้นๆ
- กลุ่มของคุณทำงานร่วมกันเพื่อสร้างโครงการอย่างไร?
- โดยใช้ท่าทางและคำพูด คุณสามารถบอกฉันได้หรือไม่ว่า Code Base ของคุณเคลื่อนไหวอย่างไรในการรวบรวมและฝังตัวอย่างแรก?
- กลุ่มของคุณเลือกตัวอย่างใดที่จะนำทางต่อไป? Code Base มีความพยายามอย่างไรในการรวบรวมและฝังตัวอย่างที่สอง?
ตอนที่ 2 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนว่าพวกเขาจะได้รับความท้าทายในการเพิ่มตัวอย่างลงในโครงการ Play Part 1 โดยรวบรวมและฝังตัวอย่างทั้งหมดสามตัวอย่าง เตือนนักเรียนว่าฐานโค้ดสามารถพกพาตัวอย่างได้ครั้งละหนึ่งตัวอย่าง ดังนั้นพวกเขาจะต้องเขียนโค้ดให้หุ่นยนต์ขับออกไปเก็บตัวอย่างและกลับมาที่ฐานสามครั้ง เนื่องจากนักเรียนสามารถเลือกเก็บตัวอย่างในลำดับใดก็ได้ โปรเจ็กต์ของพวกเขาจึงแตกต่างกัน ด้านล่างนี้เป็นภาพเคลื่อนไหวที่แสดงวิธีแก้ปัญหาที่เป็นไปได้สำหรับความท้าทายนี้
ไฟล์วีดีโอ
- แบบจำลอง แบบจำลองสำหรับให้นักเรียนสร้างโครงการเพื่อเก็บตัวอย่างที่สาม นักเรียนของคุณอาจสามารถทำความท้าทายนี้สำเร็จได้ด้วยตัวเอง อย่างไรก็ตาม สำหรับนักเรียนที่อายุน้อยกว่า คุณอาจต้องการสร้างโครงการร่วมกันเป็นชั้นเรียน หากคุณกำลังสร้างโครงการร่วมกันคุณสามารถทำตามขั้นตอนต่อไปนี้ได้
- If students need to open their Collect and Bury 2 projects from Play Part 1, model the device-specific steps to open a project, as shown in the VEX Library articles in the Open and Save section.
- นักเรียนสามารถเริ่มต้นการเพิ่มบล็อกที่ด้านล่างของโครงการเพื่อรวบรวมและฝังตัวอย่างที่สาม เตือนนักเรียนเกี่ยวกับขั้นตอนที่ฐานโค้ดจำเป็นต้องทำเพื่อรวบรวมและฝังตัวอย่างแต่ละตัวอย่าง
- These steps are also listed in the Lab 2 ภาพสไลด์โชว์ (Google / .pptx / .pdf) for students to reference while they build their projects.
- ขับรถไปยังสถานที่ตัวอย่าง
- เซ็นเซอร์กันชน LED จะเรืองแสงสีแดงเป็นเวลา 3 วินาที เพื่อแสดงว่ากำลังมีการรวบรวมตัวอย่าง
- เซ็นเซอร์กันชน LED จะส่องแสงดับลงหลังจาก 3 วินาที เพื่อแสดงว่าได้เก็บตัวอย่างเรียบร้อยแล้ว
- กลับเข้าสู่ฐาน
- เซ็นเซอร์กันชน LED จะเรืองแสงสีแดงเป็นเวลา 3 วินาที เพื่อแสดงว่าตัวอย่างกำลังถูกฝังอยู่
- เซ็นเซอร์กันชน LED จะส่องแสงดับลงหลังจาก 3 วินาที เพื่อแสดงว่าตัวอย่างถูกฝังไว้แล้ว
- หลังจากที่นักเรียนสร้างโครงการของตนเสร็จแล้ว ให้ตั้งชื่อโครงการเป็น รวบรวมและฝัง 3 และบันทึกลงในอุปกรณ์ของตน See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
- แบบจำลองสำหรับนักเรียนว่าจะวางฐานโค้ดไว้บนสนามที่ไหน นักเรียนควรเริ่มจาก "X" เสมอ แต่สามารถปรับฐานโค้ดให้เหมาะกับโครงการของตนได้ นักเรียนบางคนอาจเลือกที่จะนำทางไปที่วงกลมสีน้ำเงินก่อนแล้วจึงปรับฐานโค้ดให้หันไปทางตำแหน่งนั้นเมื่อวางหุ่นยนต์บนสนาม
การตั้งค่าภาคสนาม - เมื่อวางโค้ดฐานลงบนสนามแล้ว ให้ให้ผู้เรียนเลือกเริ่มต้นใน VEXcode GO เพื่อทดสอบโปรเจ็กต์ของพวกเขา
เลือกเริ่มเพื่อทดสอบโครงการ - เมื่อฐานโค้ดไปถึงตำแหน่งตัวอย่างแต่ละตำแหน่ง นักเรียนควรวาง 'ตัวอย่าง' ของตนไว้ด้านบนของหุ่นยนต์ หลังจากที่ฐานโค้ดกลับเข้าสู่ฐานแล้ว นักเรียนควรเอาตัวอย่างออกจากด้านบนของหุ่นยนต์เพื่อบ่งบอกว่าตัวอย่างถูกฝังไว้แล้ว
- หลังจากที่โครงการเสร็จสิ้นการดำเนินโครงการ ให้เตือนนักเรียนให้เลือกปุ่ม 'หยุด' ในแถบเครื่องมือ
เลือกหยุด - นี่คือวิธีแก้ปัญหาที่เป็นไปได้อย่างหนึ่งในการรวบรวมและฝังตัวอย่างทั้งสาม

การเล่นที่เป็นไปได้ ส่วนที่ 1 วิธีแก้ปัญหา - สำหรับกลุ่มที่ดำเนินโครงการเสร็จก่อนกำหนด ให้ท้าทายพวกเขาให้เปลี่ยนเส้นทางของฐานโค้ดเพื่อเก็บตัวอย่างในลำดับอื่น โครงการใหม่นี้เปรียบเทียบกับโค้ดเดิมของพวกเขาได้อย่างไร? อะไรที่เหมือนหรือแตกต่าง?
- อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนในขณะที่พวกเขาทำงานเพื่อทำให้ความท้าทายสำเร็จ
- แล้วฐานโค้ดจะต้องเคลื่อนที่ไปเก็บและฝังตัวอย่างที่ 3 อย่างไร? แสดงให้ฉันเห็นด้วยมือของคุณ
- การสร้างโค้ดเพื่อรวบรวมตัวอย่างที่สามนั้นง่ายหรือยากกว่าการรวบรวมตัวอย่างสองตัวแรกหรือไม่ ทำไม
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for additional information on the LED Bumper.
- เตือนเตือนนักเรียนว่าพวกเขาอาจจำเป็นต้องแบ่งปัน Field กับกลุ่มอื่น หลังจากที่พวกเขาทดสอบโครงการของพวกเขาแล้ว พวกเขาจะต้องนำหุ่นยนต์ของตนออกจากสนามเพื่อให้นักเรียนคนอื่นทำการทดสอบได้
- กลุ่มจะต้องทดสอบโค้ดของตนหลายครั้งเพื่อสร้างโครงการที่ประสบความสำเร็จ เตือนให้พวกเขาตรวจสอบลำดับของบล็อกและพารามิเตอร์ของแต่ละบล็อกเพื่อให้แน่ใจว่าฐานโค้ดกำลังขับเคลื่อนและเลี้ยวในระยะทางที่ถูกต้อง และกันชน LED กำลังส่องแสงเป็นเวลาที่ถูกต้อง
-
มีปัญหากับการผลัดกันเล่นหรือเปล่า? แจกธงสีเล็ก ๆ หรือกระดาษสีให้แต่ละกลุ่มเก็บไว้ที่โต๊ะพร้อมกับคอมพิวเตอร์ ขณะที่พวกเขากำลังเขียนโค้ด พวกเขาควรใส่ธงสีเหลือง เมื่อพวกเขาพร้อมที่จะทดสอบพวกเขาก็สามารถยกธงสีเขียวได้ เมื่อคุณเห็นกลุ่มต่างๆ ชูธงสีเขียว ให้กำหนดฟิลด์ให้พวกเขาทำการทดสอบ เมื่อพวกเขาคิดว่าโครงการของพวกเขาเสร็จสมบูรณ์และถูกต้องแล้ว พวกเขาสามารถติดธงพร้อมดาวไว้ได้!
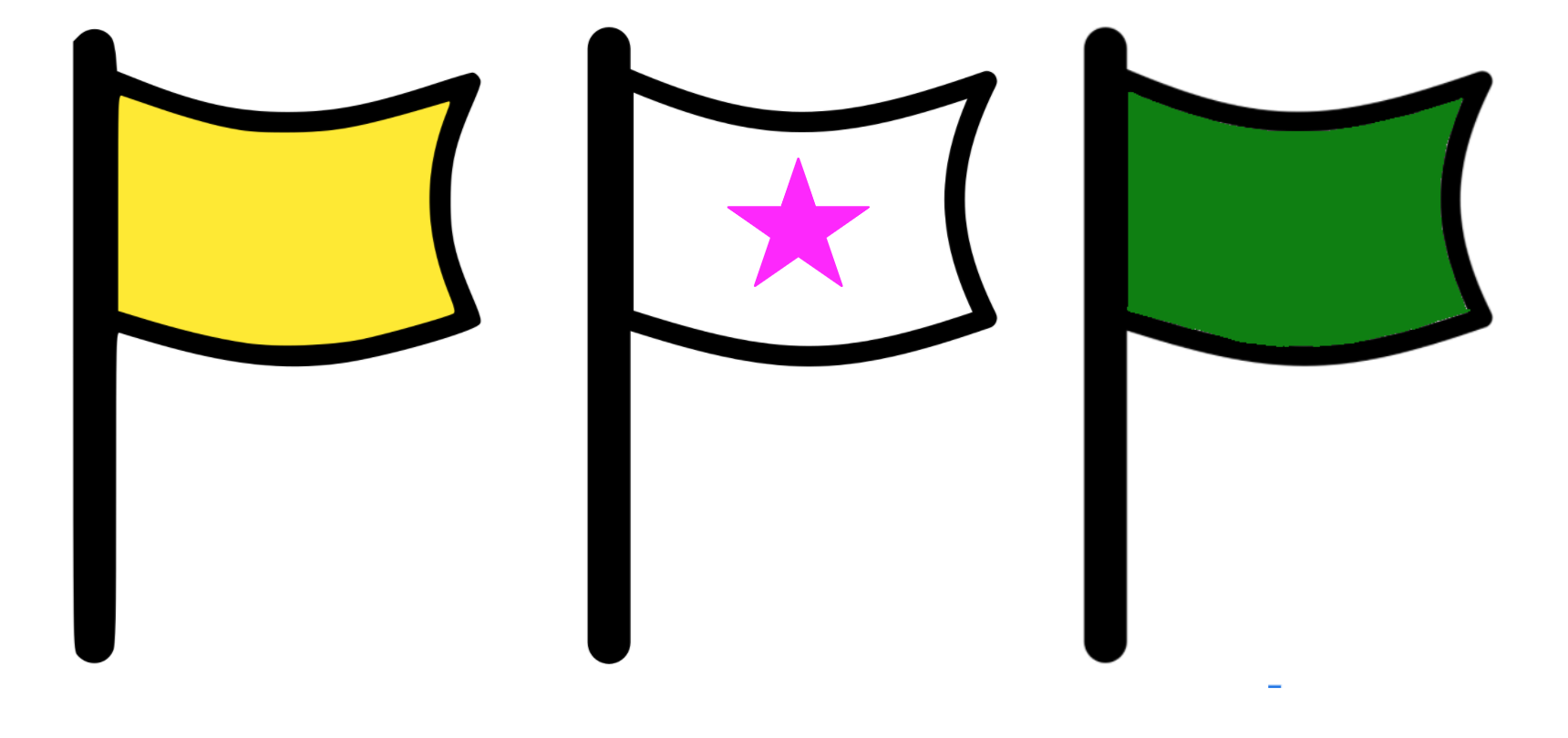
พร้อมทดสอบแล้ว!
- ถามถามนักเรียนเกี่ยวกับรถสำรวจดาวอังคารเพื่อเชื่อมโยงโครงการของพวกเขากับรถสำรวจในชีวิตจริง พวกเขาคิดว่ารถสำรวจมีเครื่องมืออะไรที่ช่วยฝังตัวอย่างได้? พวกเขาคิดว่ารถสำรวจในอนาคตจะสามารถค้นหาและเปิดเผยตัวอย่างที่ถูกฝังไว้โดยรถสำรวจนี้ได้อย่างไร?