
يلعب
الجزء الأول - خطوة بخطوة
- تعليماتأرشد الطلاب إلى أنه سيتم تكليفهم بإنشاء مشروع لقاعدة التعليمات
البرمجية لجمع ودفن عينتين. ذكّر الطلاب بأن قاعدة التعليمات البرمجية لا يمكنها حمل سوى عينة
واحدة في كل مرة، لذا سيحتاجون إلى برمجة الروبوت للخروج لجمع العينة والعودة إلى القاعدة
مرتين. نظرًا لأن الطلاب يمكنهم اختيار أي عينتين وأي مسار ينجز المهمة، فستكون مشاريعهم مختلفة
تمامًا. فيما يلي فيديو لحل مثال.
ملف الفيديو
- اطلب من الطلاب استخدام الكتل التي تعلموها سابقًا في المختبر 1 لبناء مشاريعهم. قم مع
الطلاب بتحديد الخطوات التي يجب على قاعدة التعليمات البرمجية إكمالها لجمع كل عينة
ودفنها. These steps are also listed in the عرض شرائح الصور للمختبر 2 (Google / .pptx / .pdf) for students to reference while they build their
projects.
- القيادة إلى موقع العينة.
- يضيء مستشعر الصدمات LED باللون الأحمر لمدة 3 ثوانٍ للإشارة إلى أنه يتم جمع العينة.
- يتم إيقاف تشغيل مستشعر LED Bumper بعد 3 ثوانٍ للإشارة إلى أنه تم جمع العينة.
- العودة إلى القاعدة.
- يضيء مستشعر الصدمات LED باللون الأحمر لمدة 3 ثوانٍ للإشارة إلى أنه يتم دفن العينة.
- يتم إيقاف تشغيل مستشعر LED Bumper بعد 3 ثوانٍ للإشارة إلى أن العينة تم دفنها.
-
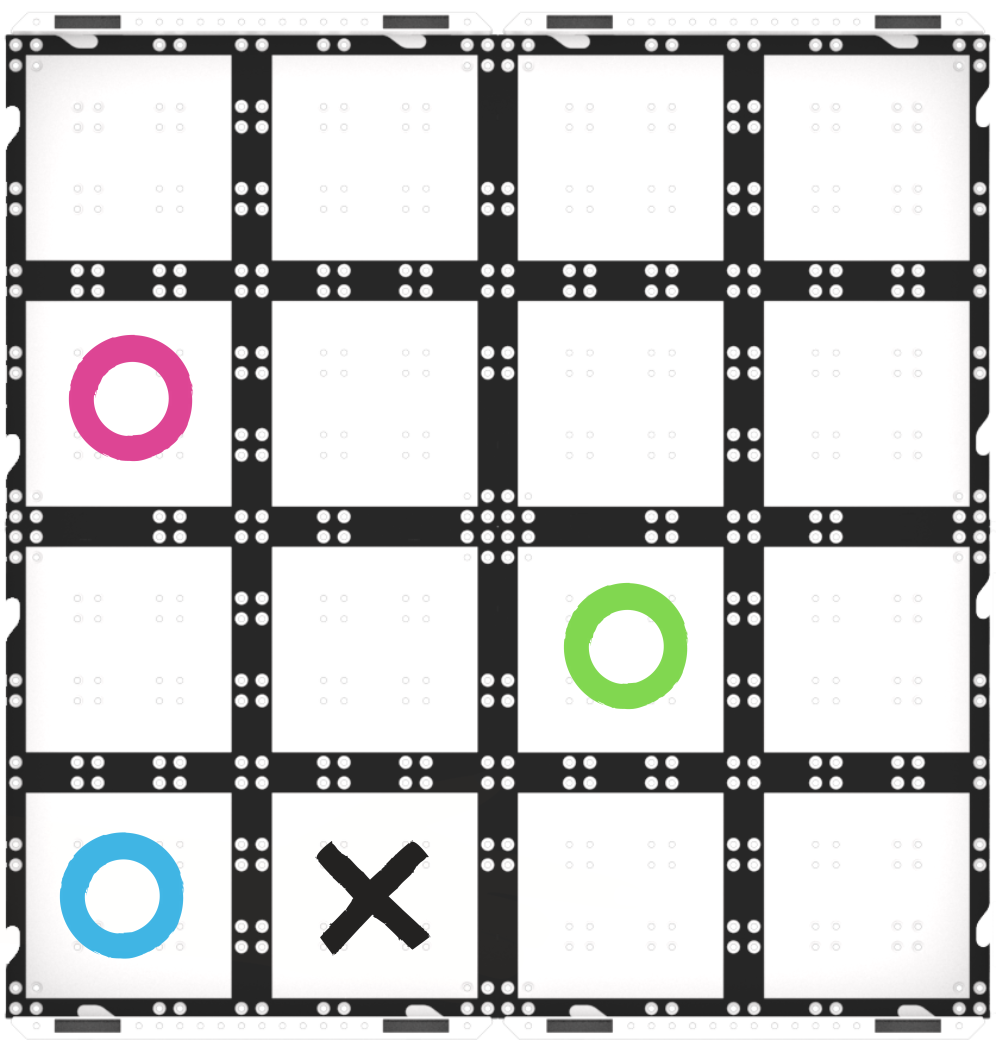
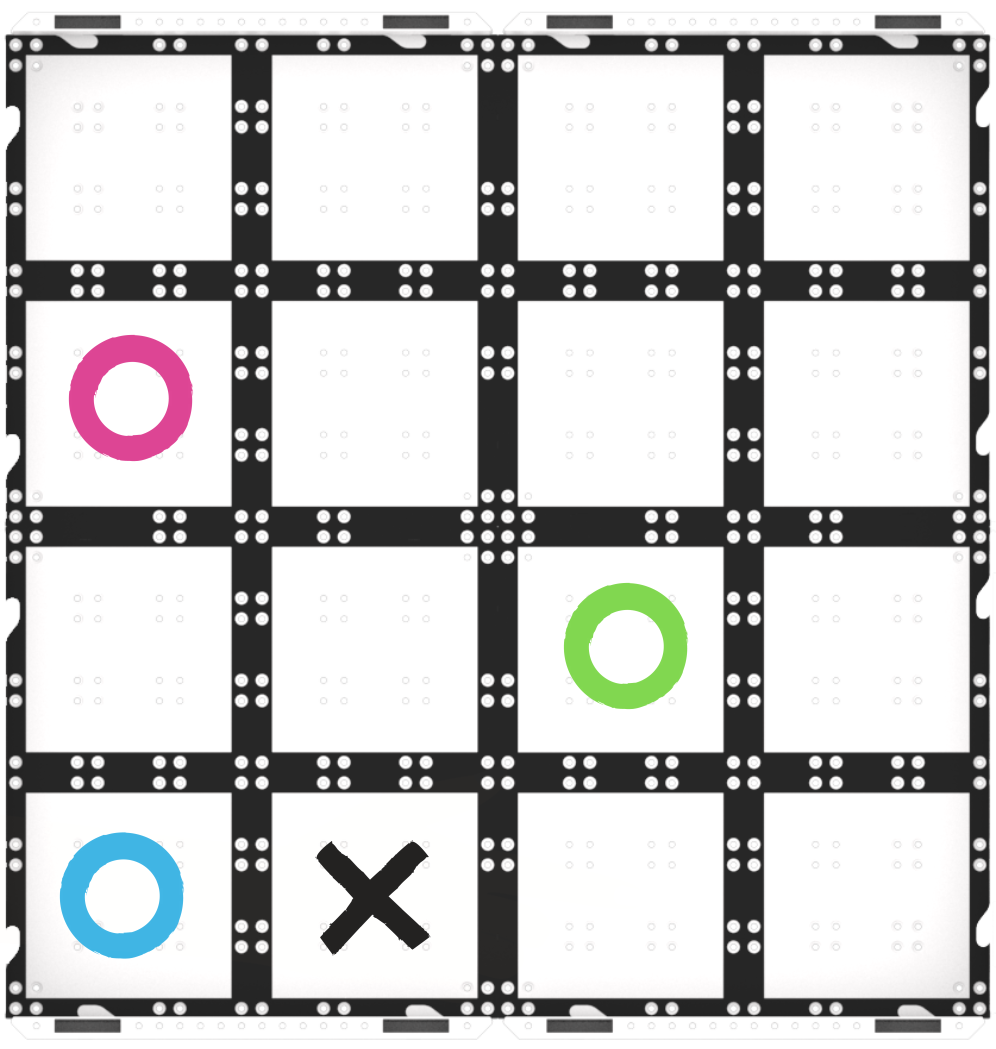
أظهر للطلاب مكان وضع الروبوتات الخاصة بهم في الميدان. يجب على الطلاب دائمًا البدء من "X"، ولكن يمكنهم توجيه قاعدة التعليمات البرمجية بالطريقة التي تتناسب بشكل أفضل مع مشروعهم. قد يختار بعض الطلاب الانتقال إلى الدائرة الزرقاء أولاً وتوجيه قاعدة التعليمات البرمجية لمواجهة هذا الموقع عند وضع الروبوت في الحقل.
إعداد الحقل
- اطلب من الطلاب استخدام الكتل التي تعلموها سابقًا في المختبر 1 لبناء مشاريعهم. قم مع
الطلاب بتحديد الخطوات التي يجب على قاعدة التعليمات البرمجية إكمالها لجمع كل عينة
ودفنها. These steps are also listed in the عرض شرائح الصور للمختبر 2 (Google / .pptx / .pdf) for students to reference while they build their
projects.
- النموذجنموذج للطلاب حول كيفية تكوين قاعدة التعليمات البرمجية الخاصة بهم
وتوصيلها بأجهزتهم في VEXcode GO.
- ابدأ بإظهار للطلاب كيفية ربط الدماغ في قاعدة التعليمات البرمجية الخاصة بهم بجهازهم في VEXcode GO. لأن خطوات الاتصال تختلف بين الأجهزة, انظر Connecting articles of the VEXcode GO VEX Library for specific steps to connect the VEX GO Brain to your computer or tablet.
- سوف يحتاجون أيضًا إلى تكوين VEXcode GO لقاعدة التعليمات البرمجية. If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can انظر Drivetrain blocks in the Toolbox.
نموذج للطلاب حول كيفية تسمية مشاريعهم وحفظها واختبارها في VEXcode GO.
- بمجرد أن يقوم الطلاب ببناء مشروعهم، اطلب منهم تسمية مشروعهم بـ Collect and Bury 2وحفظه على أجهزتهم. انظر Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
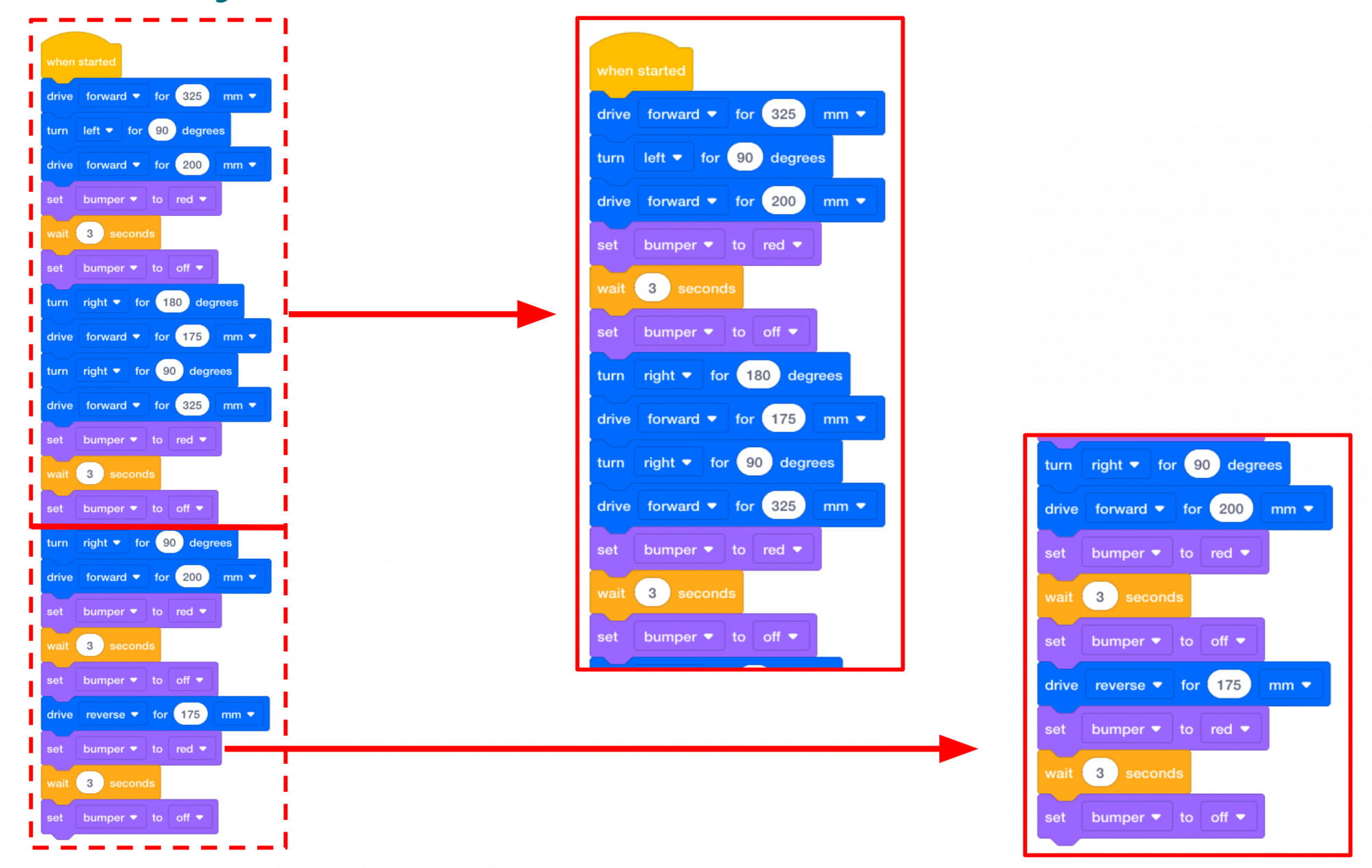
- يمكنك النمذجة باستخدام حل Engage كإستراتيجية لبدء برمجة المشروع. إذا كنت تستخدم مشروع Engage كأساس، فاطلب منهم إعادة إنشاء هذا الكود أدناه في VEXcode GO واختبار المشروع لمعرفة الكتل التي يجب إضافتها لجمع العينة الثانية ودفنها.
شارك في المشروع - بمجرد وضع قواعد التعليمات البرمجية في الحقل، اطلب من الطلاب تحديد "بدء" في VEXcode GO لاختبار مشاريعهم.
حدد "ابدأ" لاختبار المشروع - عندما تصل قاعدة التعليمات البرمجية إلى موقع كل عينة، يجب على الطلاب وضع "العينة" الخاصة بهم أعلى الروبوت عندما يضيء مستشعر LED Bumper باللون الأحمر. بعد عودة الروبوت إلى القاعدة، يجب على الطلاب إزالة العينة من أعلى قاعدة التعليمات البرمجية (عندما يضيء مستشعر الصدمات LED باللون الأحمر مرة أخرى) للإشارة إلى أن العينة تم دفنها.
-
بعد انتهاء تنفيذ المشروع، يجب على الطلاب تحديد زر "إيقاف" في شريط الأدوات.

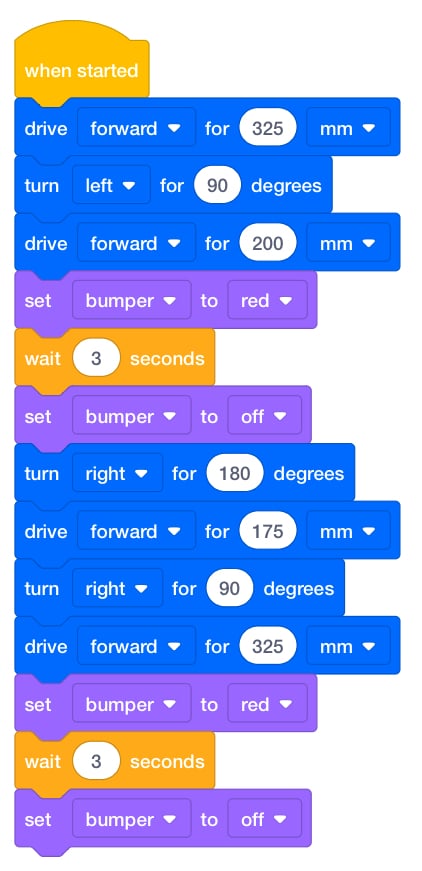
حدد المحطة - وهنا حل واحد ممكن لجمع ودفن عينتين. يمكنك استخدام هذا كمرجع عند إنشاء نموذج أو تسهيل بناء مشروع لجمع عينتين مع طلابك.
حل محتمل للجزء الأول من اللعبة بالنسبة للمجموعات التي تكمل مشروعها مبكرًا، اطلب منهم تغيير مسار قاعدة التعليمات البرمجية لجمع نفس العينتين. كم عدد المسارات المختلفة التي يمكنهم برمجتها لجمع العينتين ودفنهما؟
- تسهيلتسهيل المحادثة مع الطلاب أثناء إنشائهم واختبار مشاريعهم. من المرجح أن
المجموعات لن تتمكن من تنفيذ مشروعها بشكل صحيح في المحاولة الأولى. اطلب منهم تحرير وإعادة
اختبار مشاريع VEXcode GO الخاصة بهم حتى تتمكن قاعدة التعليمات البرمجية من جمع عينتين
ودفنهما.
- ما هي العينتين اللتين تخطط لجمعهما؟ بأي ترتيب؟
- كيف يجب أن يتم نقل قاعدة التعليمات البرمجية إلى محرك العينة الأول؟ الثاني؟
- إذا قمت بتغيير كتلة [Turn for] من 90 درجة إلى 180 درجة، فكيف ستتحرك قاعدة التعليمات البرمجية؟ هل يمكنك أن تظهر لي بيديك؟
- تذكيرذكّر الطلاب بالتحقق من ترتيب (أو تسلسل) الكتل والمعلمات التي تم تعيين
كل كتلة عليها. هل اتجهت قاعدة التعليمات البرمجية إلى اليمين بدلاً من اليسار؟ هل كانت العينة
أبعد؟ كيف يمكنك تغيير المعلمة في كتلة [Drive for] للعثور على المسافة الصحيحة التي يجب أن
تقطعها قاعدة التعليمات البرمجية؟
تحدث مع الطلاب حول حل المشكلات التي تواجههم أثناء تجولك في الفصل الدراسي. ستكون هذه عملية تكرارية، لذا ذكّر الطلاب بأن العلماء الذين يقومون ببرمجة مركبات المريخ يجب عليهم أيضًا المحاولة عدة مرات لجعل المركبة تتحرك بالطريقة المقصودة.
- اسألاسأل الطلاب عن الأماكن الأخرى التي يمكن إرسال المركبات إليها لمساعدة العلماء في دراسة منطقة ما. هل سيكون من المفيد إرسال مركبة فضائية إلى القمر؟ داخل بركان؟ تحت الماء؟ لماذا أو لماذا لا؟
مناقشة جماعية & استراحة منتصف اللعب
بمجرد أن تقوم كل مجموعة بإنشاء مشروع لجمع ودفن عينتين، يجتمعون معًا لإجراء محادثة قصيرة .
- كيف عملت مجموعتكم معًا لبناء المشروع؟
- باستخدام الإيماءات والكلمات، هل يمكنك أن تخبرني كيف تحركت قاعدة التعليمات البرمجية الخاصة بك لجمع العينة الأولى ودفنها؟
- ما هي العينة التي اختارتها مجموعتك للانتقال إليها بعد ذلك؟ كيف سارعت قاعدة البيانات إلى جمع العينة الثانية ودفنها؟
الجزء الثاني - خطوة بخطوة
- أطلبالطلاب أنه سيتم تكليفهم بإضافة جزء 1 من مشروع اللعب الخاص بهم لجمع ودفن
إجمالي ثلاث عينات. ذكّر الطلاب بأن قاعدة التعليمات البرمجية لا يمكنها حمل سوى عينة واحدة في
كل مرة، لذا سيحتاجون إلى برمجة الروبوت الخاص بهم للخروج لجمع العينة والعودة إلى القاعدة ثلاث
مرات. نظرًا لأن الطلاب يمكنهم اختيار جمع العينات بأي ترتيب، فستكون مشاريعهم مختلفة. فيما يلي
رسم متحرك يوضح أحد الحلول الممكنة لهذا التحدي.
ملف الفيديو
- النموذجنموذج للطلاب حول كيفية البناء على مشروعهم لجمع العينة الثالثة. قد
يتمكن طلابك من إكمال التحدي بأنفسهم. ومع ذلك، بالنسبة للطلاب الأصغر سنًا، قد ترغب في بناء
المشروع معًا كفصل دراسي. إذا كنت تقوم ببناء المشروع معًا، فيمكنك اتباع الخطوات التالية.
- If students need to open their Collect and Bury 2 projects from Play Part 1, model the device-specific steps to open a project, as shown in the مقالة مكتبة VEXs in the Open and Save section.
- يمكن للطلاب البدء بإضافة الكتل إلى أسفل المشروع لجمع العينة الثالثة ودفنها. ذكّر الطلاب بالخطوات التي يجب على قاعدة التعليمات البرمجية إكمالها لجمع كل عينة ودفنها.
- These steps are also listed in the عرض شرائح الصور للمختبر 2 (Google / .pptx / .pdf) for students to reference while they build their
projects.
- القيادة إلى موقع العينة.
- يضيء مستشعر الصدمات LED باللون الأحمر لمدة 3 ثوانٍ للإشارة إلى أنه يتم جمع العينة.
- يتم إيقاف تشغيل مستشعر LED Bumper بعد 3 ثوانٍ للإشارة إلى أنه تم جمع العينة.
- العودة إلى القاعدة.
- يضيء مستشعر الصدمات LED باللون الأحمر لمدة 3 ثوانٍ للإشارة إلى أنه يتم دفن العينة.
- يتم إيقاف تشغيل مستشعر LED Bumper بعد 3 ثوانٍ للإشارة إلى أن العينة تم دفنها.
- بمجرد أن يقوم الطلاب ببناء مشروعهم، اطلب منهم تسمية مشروعهم بـ جمع ودفن 3 وحفظه على أجهزتهم. انظر Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
- نموذج للطلاب حيث يجب عليهم وضع قواعد الكود الخاصة بهم في الميدان. يجب على الطلاب دائمًا البدء من "X"، ولكن يمكنهم توجيه قاعدة التعليمات البرمجية بالطريقة التي تتناسب بشكل أفضل مع مشروعهم. قد يختار بعض الطلاب الانتقال إلى الدائرة الزرقاء أولاً وتوجيه قاعدة التعليمات البرمجية لمواجهة هذا الموقع عند وضع الروبوت في الحقل.
إعداد الحقل - بمجرد وضع قاعدة التعليمات البرمجية في الحقل، اطلب من الطلاب تحديد البدء في VEXcode GO لاختبار مشاريعهم.
حدد "ابدأ" لاختبار المشروع - عندما تصل قاعدة التعليمات البرمجية إلى موقع كل عينة، يجب على الطلاب وضع "العينة" الخاصة بهم أعلى الروبوت. بعد عودة قاعدة التعليمات البرمجية إلى القاعدة، يجب على الطلاب إزالة العينة من أعلى الروبوت للإشارة إلى أن العينة تم دفنها.
- بعد انتهاء تنفيذ المشروع، ذكّر الطلاب باختيار زر "إيقاف" في شريط الأدوات.
حدد المحطة - وهنا أحد الحلول الممكنة لجمع ثلاث عينات ودفنها.

حل محتمل للجزء الأول من اللعبة - بالنسبة للمجموعات التي تكمل مشروعها مبكرًا، اطلب منهم تغيير مسار قاعدة التعليمات البرمجية لجمع العينات بترتيب مختلف. كيف يقارن هذا المشروع الجديد مع الكود الأصلي؟ ما هو المتشابه أو المختلف؟
- تسهيلتسهيل المحادثة مع الطلاب أثناء عملهم على إكمال التحدي.
- كيف يجب أن تتحرك قاعدة التعليمات البرمجية لجمع العينة الثالثة ودفنها؟ أرني بيديك.
- هل إنشاء الكود لجمع العينة الثالثة أسهل أم أصعب من جمع العينتين الأوليين؟ لماذا؟
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for additional information on the LED Bumper.
- تذكيرذكّر الطلاب بأنهم قد يحتاجون إلى مشاركة الحقل مع مجموعات أخرى. بعد أن
يختبروا مشاريعهم، سيحتاجون إلى إزالة الروبوت الخاص بهم من الميدان حتى يتمكن الطلاب الآخرون
من اختباره.
- ستحتاج المجموعات إلى اختبار الكود الخاص بها عدة مرات لإنشاء مشروع ناجح. ذكّرهم بالتحقق من ترتيب كتلهم ومعلمات كل كتلة للتأكد من أن قاعدة التعليمات البرمجية تقود وتدور للمسافة الصحيحة وأن مصباح LED يضيء بالقدر الصحيح من الوقت.
-
هل لديك مشكلة في تبادل الأدوار؟ قم بإعطاء كل مجموعة أعلامًا صغيرة ملونة أو قطعًا من الورق الملون للاحتفاظ بها على مكاتبهم مع أجهزة الكمبيوتر الخاصة بهم. بينما يقومون بالبرمجة، يجب عليهم وضع العلم الأصفر. عندما يكونون مستعدين للاختبار، بإمكانهم رفع العلم الأخضر. عندما ترى المجموعات ترفع أعلامها الخضراء، قم بتعيين لهم الحقول للاختبار عليها. عندما يعتقدون أن مشروعهم قد اكتمل وأصبح صحيحًا، يمكنهم رفع علم عليه نجمة!
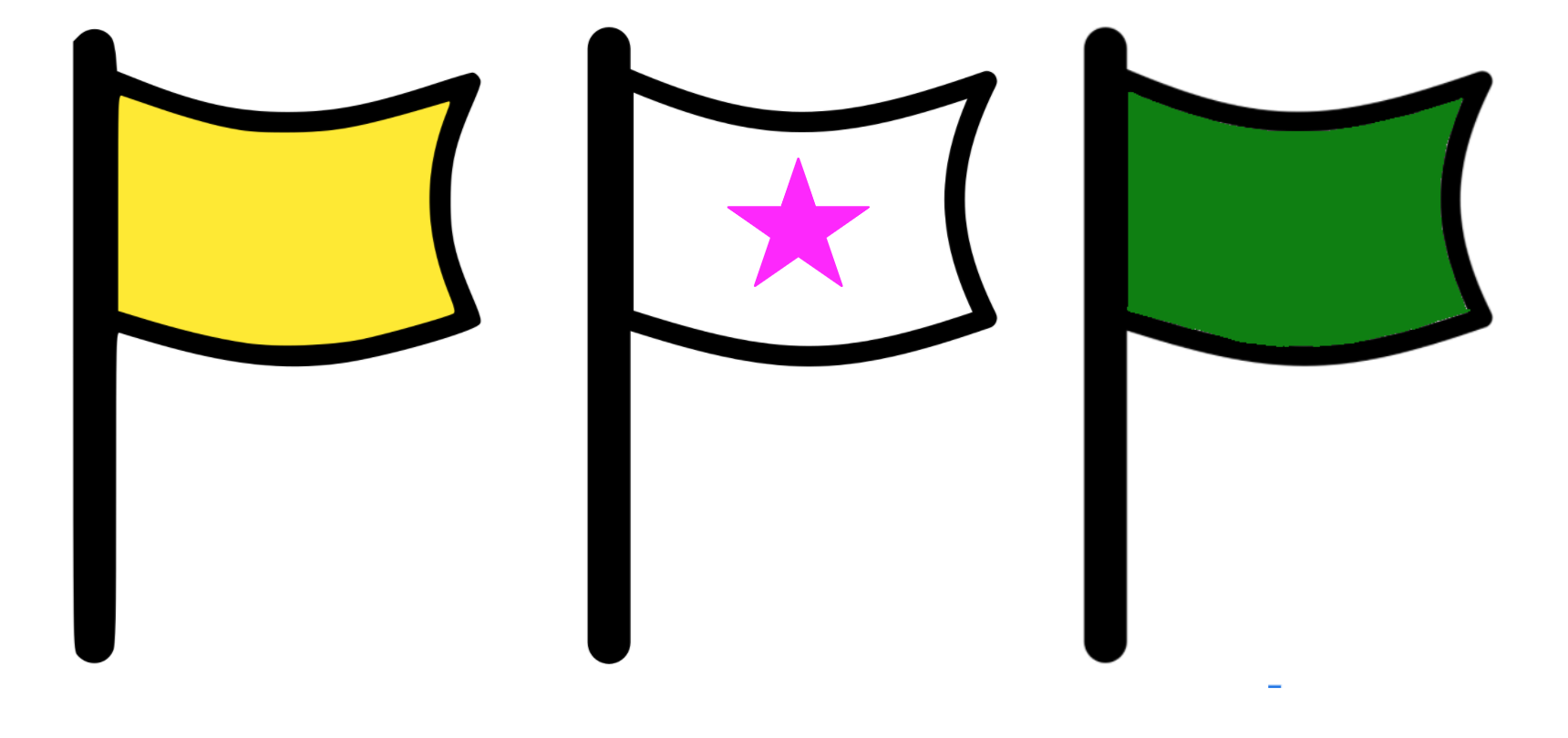
جاهز للاختبار!
- اسألاسأل الطلاب عن مركبات المريخ لربط مشاريعهم بالمركبات الحقيقية. ما هي الأدوات التي يعتقدون أن المركبات الفضائية تمتلكها والتي تسمح لها بدفن العينات؟ كيف يظنون أن المركبات الفضائية المستقبلية ستكون قادرة على العثور على العينات التي دفنها هذا المسبار واكتشافها؟