
놀다
1부 - 단계별 설명
- 지시학생들에게 코드 베이스 로봇에 대한 더럽고 지루하거나 위험한 작업 시나리오를 선택하고, 프로젝트에 대한 계획을 세우도록 지시합니다. 학생들은 제공된 시나리오 중 하나를 사용할 수 있습니다(실험실 4 이미지 슬라이드쇼의 2~7번 슬라이드 참조). 또는 직접 더럽고 지루하거나 위험한 작업 시나리오를 만들 수도 있습니다. 이 프로젝트의 목표는 코드 베이스 로봇이 단원에서 학습한 명령인 [운전하기] 및 [회전하기]를 사용하여 작업을 완료하도록 지시하는 것입니다.
학생들은 청사진 워크시트를 사용하여 프로젝트 계획을 만들어야 합니다. 또한, 작업 시나리오에서 작업을 완료하는 데 도움이 되는 코드 베이스 로봇에 추가하고 싶은 아이디어도 스케치할 수 있습니다.
프로젝트 계획 - 모델청사진 워크시트를 사용하여 계획을 만드는 단계를 모델링합니다.
- 학생들에게 코드 베이스 로봇이 위험한 수중 탐사 작업을 완료하기를 바란다고 말하세요.
- 로봇이 작업을 완료하기 위해 이동할 경로를 매핑하기 위해 각 단계를 스케치하여 청사진 워크시트를 사용하는 방법을 학생들에게 보여줍니다.
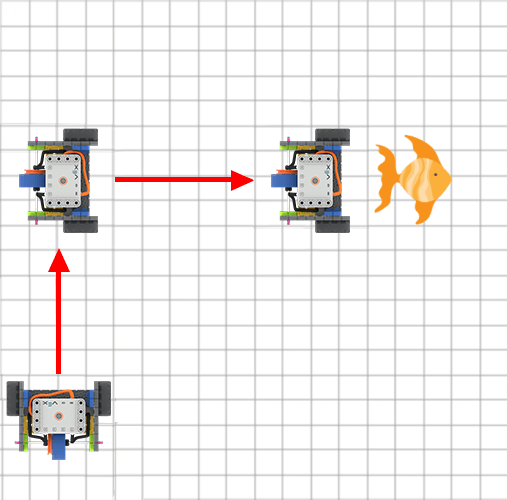
- 예시 계획: 로봇이 아직 발견되지 않은 바다 생물에 더 가까이 다가가길 원해요!
- 앞으로 나아갈 코드 베이스 로봇을 스케치하세요
- 오른쪽으로 도는 코드 베이스 로봇을 스케치합니다.
- 바다 생물을 향해 전진하는 코드 베이스 로봇을 스케치하세요.
- 예시 계획: 로봇이 아직 발견되지 않은 바다 생물에 더 가까이 다가가길 원해요!
청사진 스케치
- 촉진학생들이 프로젝트 계획과 결과물을 만들 때 토론을 촉진합니다.
- 로봇이 어떤 종류의 작업을 수행하기를 원하시나요? 더럽고, 지루하고, 위험한가요?
- 로봇이 작업을 완료하려면 어떤 지침이 필요합니까?
- 시나리오를 뒷받침하기 위해 어떤 유물을 만들 수 있나요?
- 상기시키기프로젝트를 만들기 전에 계획을 여러 번 반복할 수 있다는 점을 그룹에 상기시킵니다. 실패를 받아들이세요. 실패는 학습 과정의 일부입니다.
- 질문학생들에게 집에서 했던 일이나 집안일을 생각해 보라고 합니다. 누군가 그 일을 하는 방법을 설명해줬나요? 해당 작업을 올바르게 수행하는 방법을 배우기 위해 여러 번 시도해야 했습니까? 그들은 친구에게 그 일을 완료하는 단계를 설명할 수 있을까요?
중간 휴식 & 그룹 토론
각 그룹 프로젝트 계획마치면, 짧은 대화를 위해 모이세요.
그룹별로 프로젝트 계획을 공유하고 다음 질문을 해보세요.
- 로봇을 어떤 작업에 사용하시겠습니까?
- 코드 베이스 로봇은 작업을 완료하기 위해 어떻게 움직일까요?
- 청사진 워크시트에서 어떤 단계를 만들었나요?
- 아직도 확신하지 못하는 것이 있나요?
2부 - 단계별 안내
- 지시각 그룹에게 프로젝트를 만들고 시작하도록 지시합니다. 이 활동의 목표는 프로젝트 계획과 VEXcode GO를 사용하여 코드 베이스 로봇에게 선택한 더럽고 지루하거나 위험한 작업 시나리오에서 작업을 완료하도록 지시하는 것입니다.
- 모델학생들이 코드 베이스 로봇의 이동을 지시하기 위해 [운전] 및 [회전] 블록 {When started}사용하는 방법을 그룹 설정을 사용하여 모델링합니다.
시작하기 전에 학생들이 VEXcode GO에서 코드 베이스 했는지 확인하세요. [Turn for] 및 [Drive for] 블록은 코드 베이스가 구성될 때까지 사용할 수 없습니다.
-
학생들에게 Code Base 로봇이 이동해야 하는 거리를 측정하는 방법을 보여주고, Coe Base 로봇이 이동해야 하는 방향을 선택한 다음 [Drive for] 블록에 거리 값을 입력하세요.

[드라이브 포] 블록 -
[회전 방향] 블록에 '오른쪽' 또는 '왼쪽'을 선택하고 각도를 입력하여 회전 방향과 거리를 설정하는 방법을 보여드립니다.
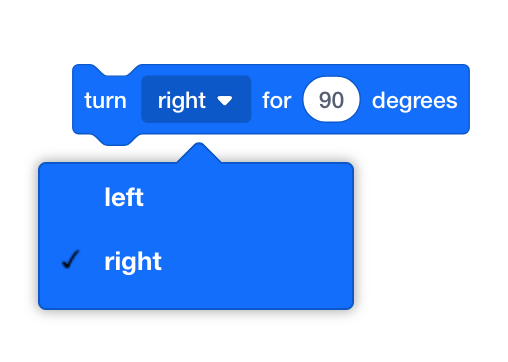
[돌아가기] 블록
-
- 촉진교실을 돌면서 그룹끼리 토론을 진행합니다. 이 활동의 목표는 프로젝트 계획과 VEXcode GO를 사용하여 코드 베이스 로봇에게 자신이 선택한 더럽고 지루하거나 위험한 작업 시나리오에서 작업을 완료하도록 지시하는 것이라는 것을 학생들이 이해했는지 확인하세요.
그룹에게 프로젝트 계획을 사용하여 코드 베이스 로봇에 대한 지침을 순서대로 배열하는 방법을 설명해 달라고 요청합니다. 질문 예시는 다음과 같습니다.
- 프로젝트 계획에서 코드 베이스 로봇에 대한 지침이 어떻게 작성되거나 그려지는지 보여주세요.
- 이 작업에서 코드 베이스 로봇은 어떤 작업을 수행해야 합니까?
- 얼마나 앞으로/뒤로 이동해야 합니까?
- 얼마나 회전해야 하나요? 몇 도입니까?

그룹 토론 - 상기시키기학생들에게 지난 수업에서 코드 베이스 로봇에게 특정 거리를 이동하도록 지시하는 방법과 회전 각도를 포함하는 방법에 대해 배운 내용을 되돌아보도록 상기시킵니다.
- 질문학생들에게 코드 베이스 로봇 프로젝트를 사용하여 작업을 완료할 수 있는 두 가지 이상의 추가 시나리오나 직업을 생각해 보라고 합니다. 그들은 시나리오에서 코드 베이스 로봇이 추가 작업을 완료하도록 프로젝트에 어떻게 추가할 수 있을까요?
선택 사항: 이 시점에서 필요한 경우 그룹은 코드 베이스 로봇을 해체할 수 있습니다.