
놀다
1부 - 단계별 설명
- 지시학생들에게 코드 베이스 로봇을 어떻게 발전시킬지 탐구하도록 지시하세요! 그들은 프로젝트를 시작하기 전에 코드 베이스 로봇이 어디에 도달할지 예측할 것입니다. 아래 애니메이션을 시청하여 다양한 거리에 걸쳐 코드 베이스가 발전하는 예를 확인하세요. 애니메이션에서 코드 베이스는 타일의 왼쪽 하단 모서리에서 시작하여 먼저 150mm 앞으로 이동한 후 멈춥니다. 그런 다음 시작 위치로 돌아와 75mm 앞으로 주행한 후 멈춥니다.
비디오 파일
- 모델[Drive for] 블록을 사용하여 장치에서 VEXcode GO를 실행하고 코드 베이스를 앞으로 나아가게 하는 프로젝트를 만드는 방법을 모델링합니다.
- 학생들에게 프로젝트 열기 및 저장VEX 라이브러리 문서의 단계를 모델로 제공하고, 학생들이 단계에 따라 프로젝트를 열고 저장하도록 합니다.
- 학생들에게 프로젝트 이름을 Forward지정하도록 지시합니다.
- 다음 학생들에게 코드 베이스 로봇의 Brain 자신의 장치에 연결하게 하세요.
- 학생들이 프로젝트 이름을 정하고 Brain을 장치에 연결한 후, Code Base 로봇을 구성하기 위한 단계를 따라야 합니다. 코드 기반 구성 VEX 라이브러리 문서의 단계를 모델링하고 학생들이 도구 상자에서 드라이브트레인 블록을 볼 수 있는지 확인하세요.
-
[Drive for] 블록을 작업 공간으로 끌어와서 {When started} 블록 아래에 배치하는 방법을 보여주세요.
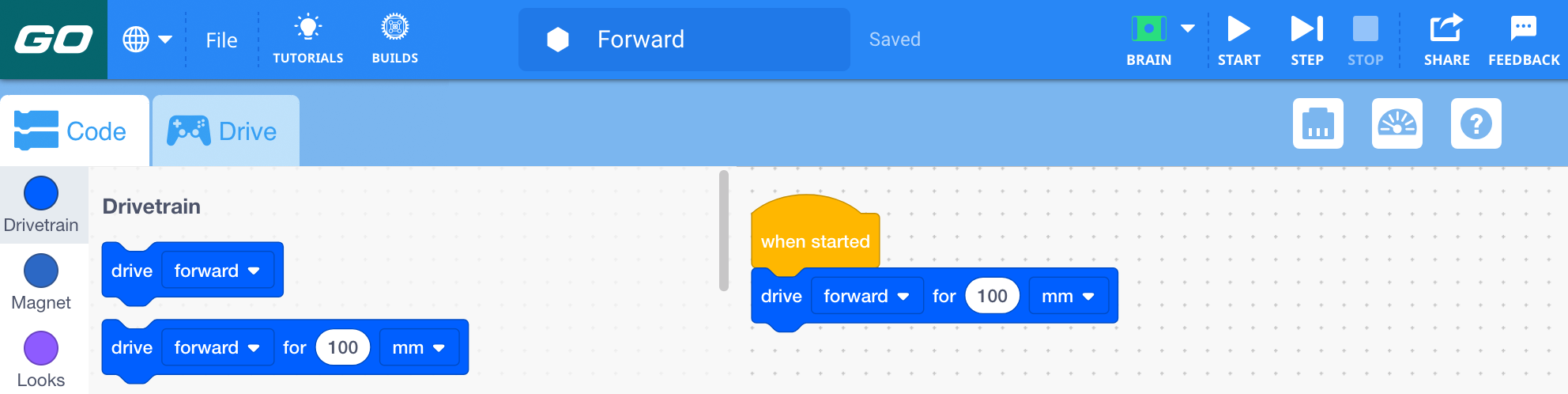
[Drive for] 블록 추가 -
[Drive for] 블록의 매개변수를 150mm로 변경합니다.
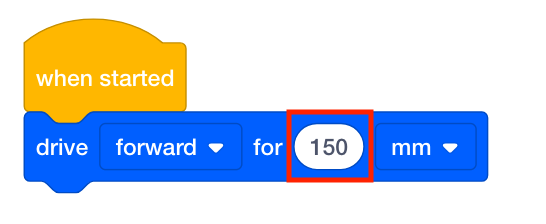
매개변수 변경 - [Drive for] 블록의 매개변수를 기반으로 코드 베이스 로봇이 얼마나 이동할지 예측하는 방법을 학생들에게 모델로 제공합니다. 학생들에게 코드 베이스를 시작 위치에 놓은 다음 로봇이 얼마나 멀리 이동할지 추정해 보라고 합니다. 그들은 코드베이스가 멈출 것이라고 생각되는 곳에 마커를 놓아야 합니다.
-
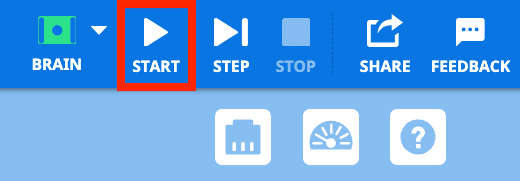
학생들에게 도구 모음에서 '시작' 버튼을 선택하여 프로젝트를 시작하는 방법을 보여주는 모델입니다.
- 학생들이 동작을 관찰한 후, 학생들에게 프로젝트로 돌아가서 [Drive for] 블록의 매개변수를 150mm에서 200mm 또는 250mm와 같이 다른 거리로 편집하는 방법을 모델로 보여줍니다. 그런 다음 프로젝트를 다시 시작하여 매개변수 변경이 Code Base 로봇의 움직임에 어떤 영향을 미치는지 확인합니다.
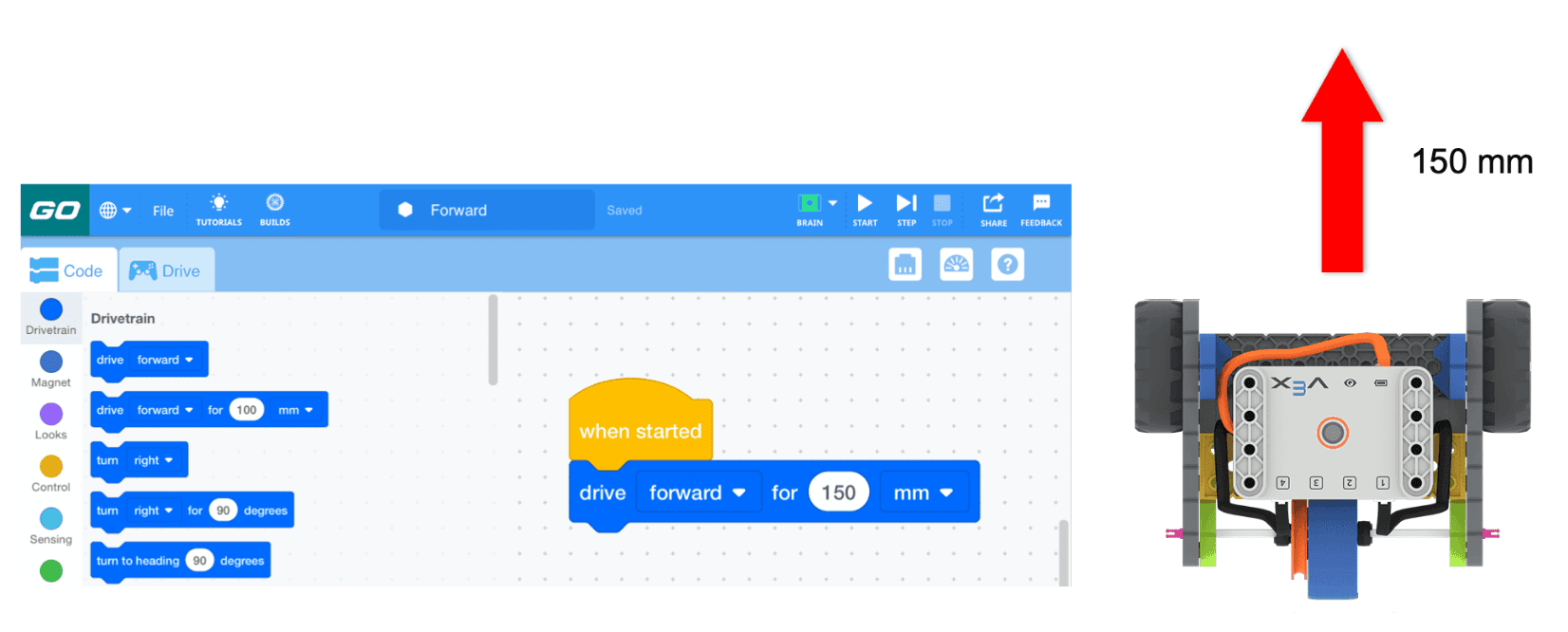
앞으로 150mm - 촉진다음을 질문하여 학생들의 관찰과 프로젝트 목표에 대한 토론을 촉진합니다.
- 프로젝트를 시작하기 전에, Code Base 로봇이 얼마나 멀리 움직일 것이라고 생각했는지 손을 사용해서 보여 줄 수 있나요?
- 거리 매개변수를 무엇으로 변경했고, 그 이유는 무엇입니까? 거리가 변경된 지금, 코드 베이스 로봇은 얼마나 멀리 이동할 수 있을 것으로 생각하시나요?
- 예상했던 거리와 비교했을 때 이동 거리는 어떻습니까?
- 이 프로젝트에서는 어떤 종류의 블록을 사용하셨나요?

코드베이스 로봇의 움직임에 대해 논의하세요 - 상기시키기학생들에게 프로젝트를 만들고 시작할 때 질문이 있을 수 있다는 점을 상기시켜줍니다. 학생들에게 새로운 개념을 배우려면 여러 번 시도해야 할 수도 있다는 점을 상기시키고, 첫 번째 시도에서 실패하더라도 다시 시도하도록 격려하세요.
- 질문학생들에게 Code Base 로봇이 교실을 가로질러 이동하려면 얼마나 멀리 이동해야 할지 생각해 보라고 합니다. 학생들에게 이런 유형의 계획이 일상생활에서 왜 유용한지 설명해 보라고 하세요. 학생들에게 계획을 세우고 정확한 방향을 제시하는 능력이 직업에 어떻게 유용할 수 있을지 물어보세요. 학생들에게 지시가 필요한 직업이 있는지 물어보세요.
중간 휴식 & 그룹 토론
각 그룹 이 프로젝트완료하면, 짧은 대화를 위해 모이세요.
- 코드 베이스 로봇은 당신이 생각했던 곳에 도착했나요? 그렇지 않다면, 예측과 얼마나 가까웠나요?
- 프로젝트를 어떻게 편집하셨나요? 어떤 새로운 거리를 선택하셨나요?
- [Drive for] 블록에서 거리를 변경하는 데 어려움이 있었나요?
드라이브트레인 소개:
- 이제 VEXcode GO를 사용하여 Code Base 로봇이 전진할 수 있도록 하는 방법을 살펴보았는데, 블록의 "Drivetrain" 섹션이 있는 이유는 무엇이라고 생각하시나요?
- 드라이브트레인이 무엇이라고 생각하시나요? 당신의 생각을 설명해 줄 수 있나요?
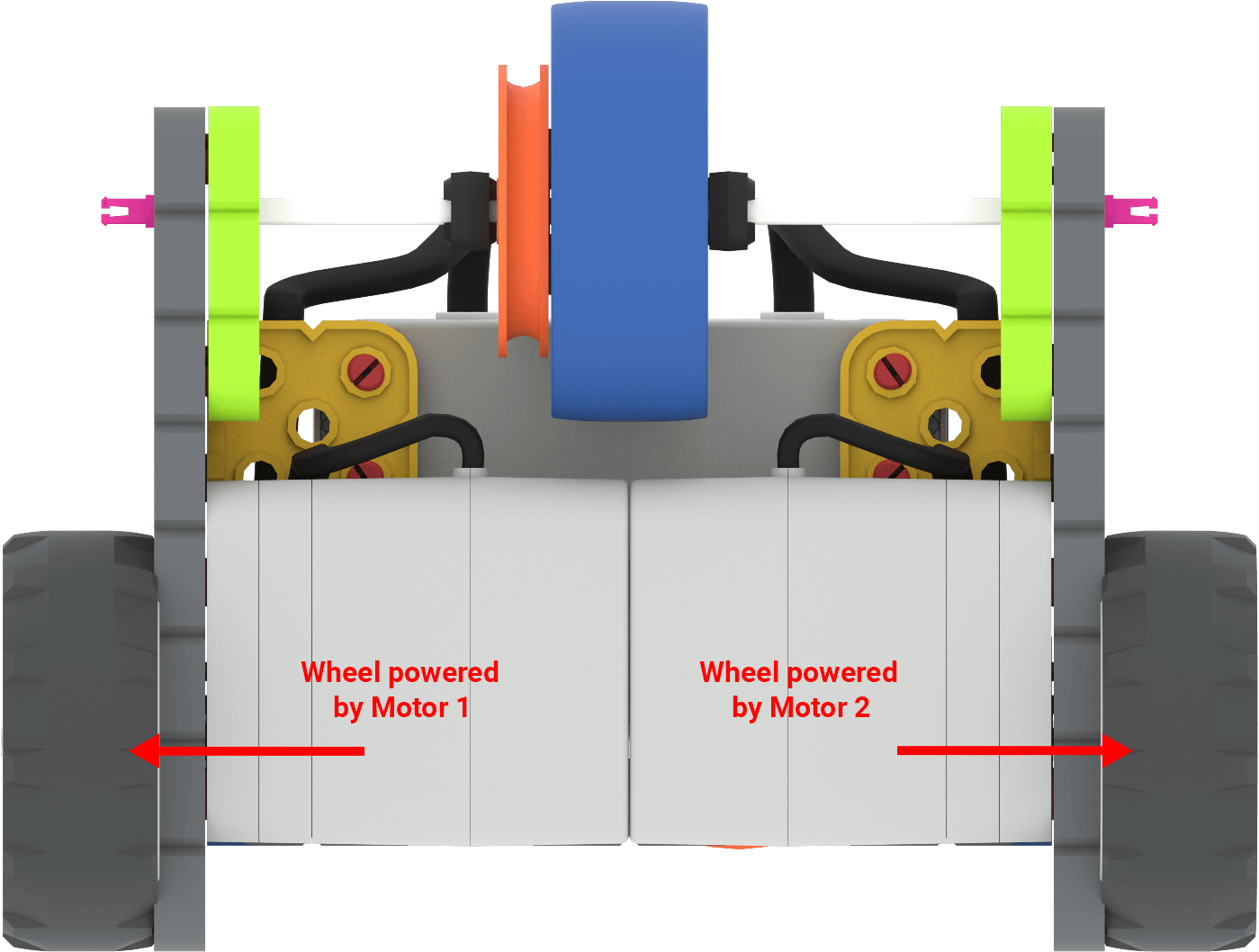
- Code Base 로봇의 드라이브트레인이 어디에 있는지 제스처를 사용하여 보여 줄 수 있나요?
- 코드 베이스 로봇의 바닥을 보고 이 구동계의 어디에 모터가 있는지, 그리고 어떤 바퀴에 부착되어 있는지 알아볼 수 있나요?
2부 - 단계별 안내
- 지시학생들에게 코드 베이스 로봇을 전진 및 후진으로 움직이는 방법을 탐구하도록 지시합니다!
시작하려면 각 그룹에 장치, VEXcode GO, 최소 하나의 배치 마커, 그리고 구축된 코드 베이스가 있어야 합니다. 아래 애니메이션을 시청하여 코드 베이스가 어떻게 역방향으로 움직이는지 확인하세요. 애니메이션에서 코드 베이스는 타일의 왼쪽 상단 모서리에서 시작하여 150mm 후진한 후 멈춥니다. 그런 다음 시작 위치로 돌아와 75mm 동안 후진합니다.
비디오 파일 - 모델학생들이 장치에서 VEXcode GO를 실행하고 프로젝트 이름을 Reverse로 바꾸는 방법을 설명하는 모델입니다. 학생들에게 '다른 이름으로 저장'을 선택하여 이 프로젝트를 첫 번째 프로젝트와 별도로 저장하도록 안내하세요.
자세한 내용은 프로젝트 열기 및 저장문서의 단계를 참조하세요.
-
[Drive for] 블록의 매개변수를 변경하여 코드 기반 드라이브를 반대로 만드는 방법을 모델링합니다.
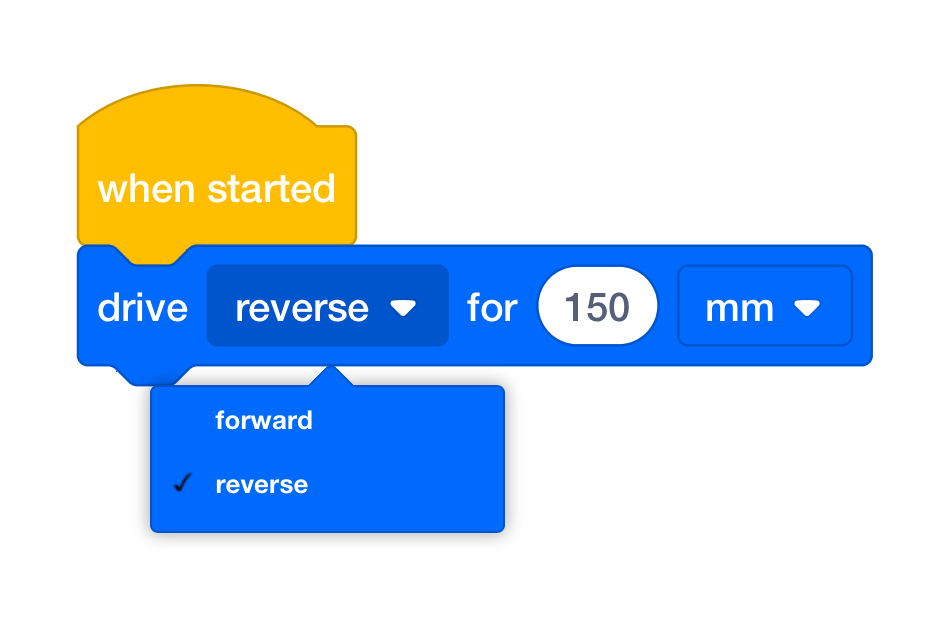
파라미터 변경(역방향) - 연극 1부와 동일한 추정 과정을 사용합니다. 학생들에게 코드 베이스를 시작 위치에 놓은 다음 로봇이 얼마나 멀리 이동할지 추정해 보라고 합니다. 그들은 코드베이스가 멈출 것이라고 생각되는 곳에 마커를 놓아야 합니다.
-
학생들에게 프로젝트를 시작하게 하세요. 연결 문제가 발생하면 VEX GO Brain연결하는 단계를 상기시켜야 할 수도 있습니다.
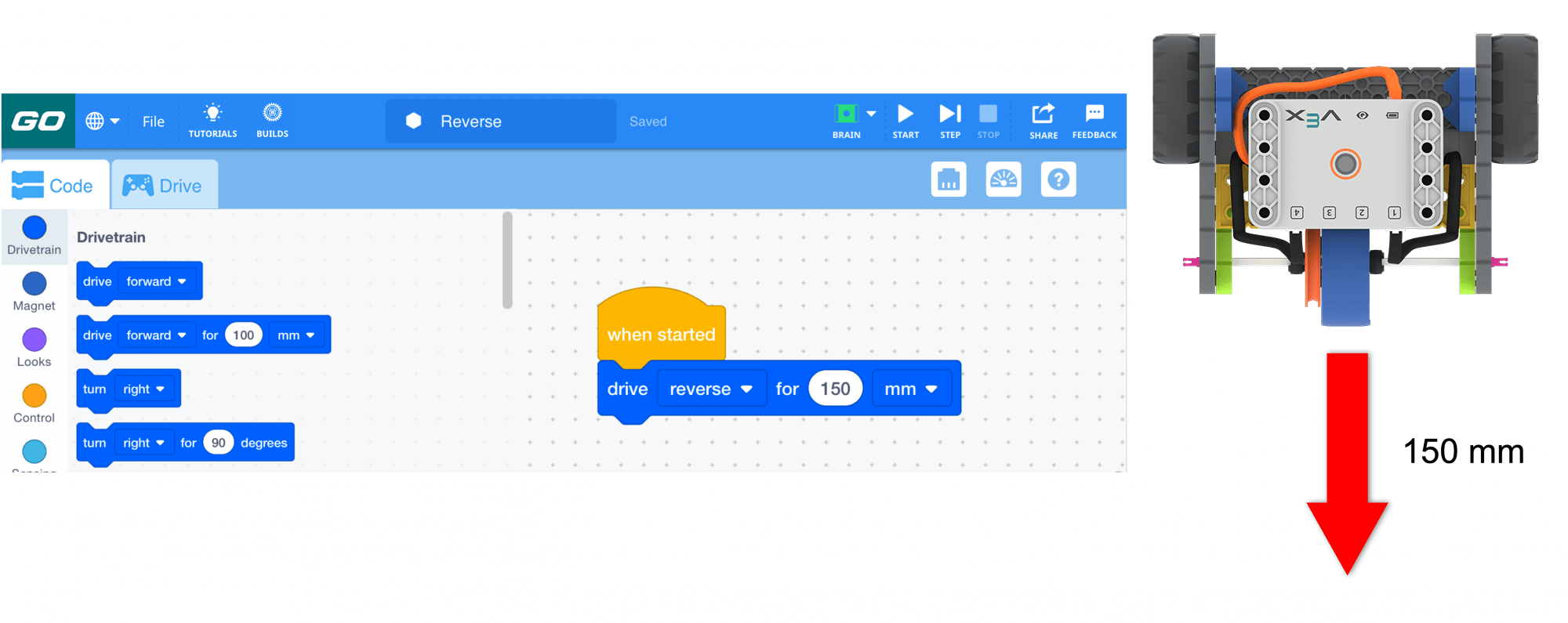
역방향 150mm - 학생들이 후진 운전의 동작을 관찰한 후, 학생들에게 프로젝트로 돌아가는 방법을 모델로 보여줍니다. 그런 다음 프로젝트 이름을Forward 및 Reverse로 바꿔야 합니다. 자세한 내용은 VEX 라이브러리 열기 및 저장문서의 단계를 참조하세요.
-
학생들에게 두 번째 [Drive for] 블록을 추가하는 방법을 보여주는 모델입니다. 한 블록[Drive for]에서는 로봇이 전진 주행해야 하고, 두 번째 블록에서는 로봇이 후진 주행해야 합니다. [Drive for] 블록의 매개변수를 편집하는 방법을 모델링한 다음, 프로젝트를 다시 시작하여 매개변수 변경이 코드 베이스 로봇의 움직임에 어떤 영향을 미치는지 확인합니다.
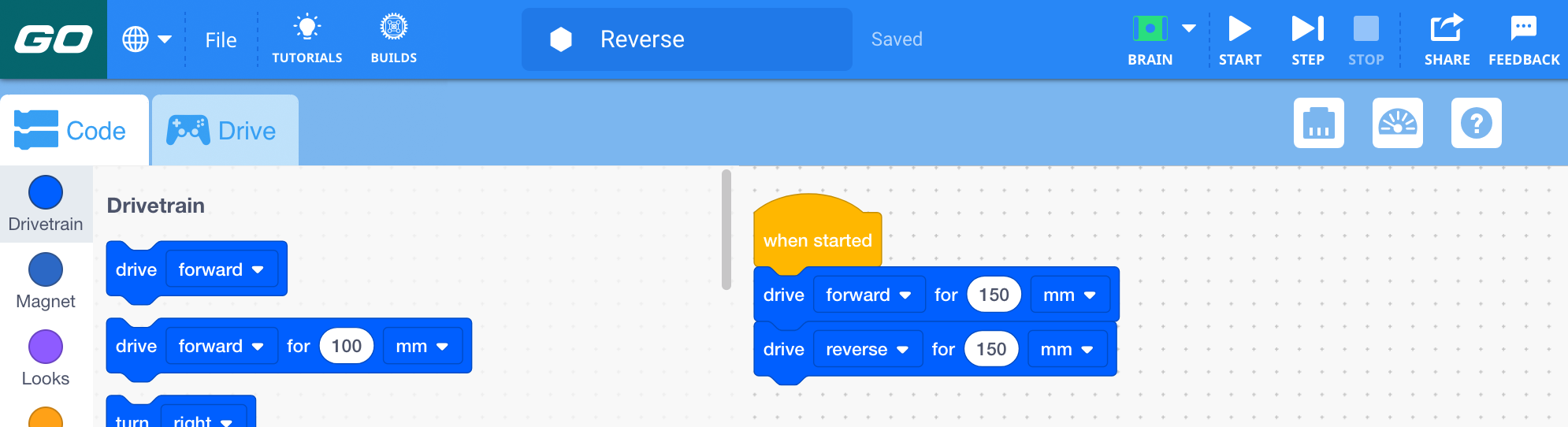
정방향 및 역방향
-
- 촉진학생들이 프로젝트를 편집하고 로봇의 동작을 관찰하는 동안 다음 질문을 통해 토론을 촉진합니다.
- 프로젝트를 실행하기 전에 Code Base 로봇이 얼마나 움직일 것이라고 생각했는지 손을 사용해 보여 주시겠습니까?
- 거리 매개변수를 무엇으로 변경했고, 그 이유는 무엇입니까? 거리가 변경된 지금, 코드 베이스 로봇은 얼마나 멀리 이동할 수 있을 것으로 생각하시나요?
- [Drive for] 블록을 하나 더 추가했을 때, 같은 거리를 이동하도록 설정했나요? 꼭 같아야 하나요? 왜 그럴까? 아니면 왜 그렇지 않을까?
- 제 코드베이스 로봇이 100mm 앞으로 주행하도록 코딩되어 있다면, 로봇을 두 배로 이동시키고 싶다면 거리를 얼마만큼 변경해야 할까요?
코드베이스 로봇의 움직임에 대해 논의하세요 - 상기시키기학생들이 프로젝트를 편집하고 시작할 때 질문이 있을 수 있음을 상기시켜주세요. 학생들에게 새로운 개념을 배우려면 여러 번 시도해야 할 수도 있다는 점을 상기시키고, 프로젝트에 블록을 추가하고 편집하는 데 실패하면 다시 시도하도록 격려하세요.
- 질문학생들에게 코드 베이스 로봇이 출입구까지 운전한 후 다시 시작 지점으로 돌아오려면 어떻게 움직여야 할지 생각해 보라고 합니다. 이제 코드 베이스 로봇은 어떤 유형의 작업이나 직무를 수행할 수 있으며, 앞뒤로 이동할 수 있습니까? 학생들에게 코드 베이스 로봇이 앞으로, 뒤로 움직여서 완료할 수 있는 작업을 제안해 보라고 합니다.
선택 사항: 이 시점에서 필요한 경우 그룹은 코드 베이스 로봇을 해체할 수 있습니다. 이후 랩에서도 동일한 빌드를 사용하므로 교사를 위한 옵션입니다.