
Spielen
Teil 1 - Schritt für Schritt
- AnweisungenWeisen Sie die Schüler an, herauszufinden, wie sie
ihren Code Base-Roboter voranbringen können! Bevor sie mit dem Projekt
beginnen, sagen sie voraus, wo der Code Base-Roboter landen wird. Sehen Sie
sich die Animation unten an, um Beispiele für die Vorwärtsbewegung der
Codebasis über unterschiedliche Distanzen anzuzeigen. In der Animation startet
die Codebasis in der unteren linken Ecke der Kachel, fährt zunächst 150 mm
vorwärts und stoppt. Anschließend erscheint es wieder am Startort, fährt 75 mm
vorwärts und hält an.
Videodatei
- ModellModellieren Sie, wie VEXcode GO auf einem Gerät gestartet
wird und erstellen Sie ein Projekt, das die Codebasis mit dem Block [Drive
for] voranbringt.
- Modell für Schüler die Schritte des Öffnen und speichern Sie ein Projekt Lesen Sie den Artikel der VEX-Bibliothek und laden Sie ihn herunter Befolgen Sie die Schritte zum Öffnen und Speichern ihres Projekts.
- Weisen Sie die Schüler an, ihr Projekt Weiterzu nennen.
- Dann haben Sie die Schüler Verbinde das Gehirn ihrer Codebasis Roboter an ihr Gerät anschließen.
- Nachdem die Schüler ihr Projekt benannt und das Brain mit ihrem Gerät verbunden haben, müssen sie die Schritte zur Konfiguration für den Code Base-Roboter befolgen. Modellieren Sie die Schritte aus dem Konfigurieren Sie eine Codebasis VEX-Bibliothek Artikel und stellen Sie sicher, dass die Schüler die Antriebsstrangblöcke im sehen können Werkzeugkasten.
-
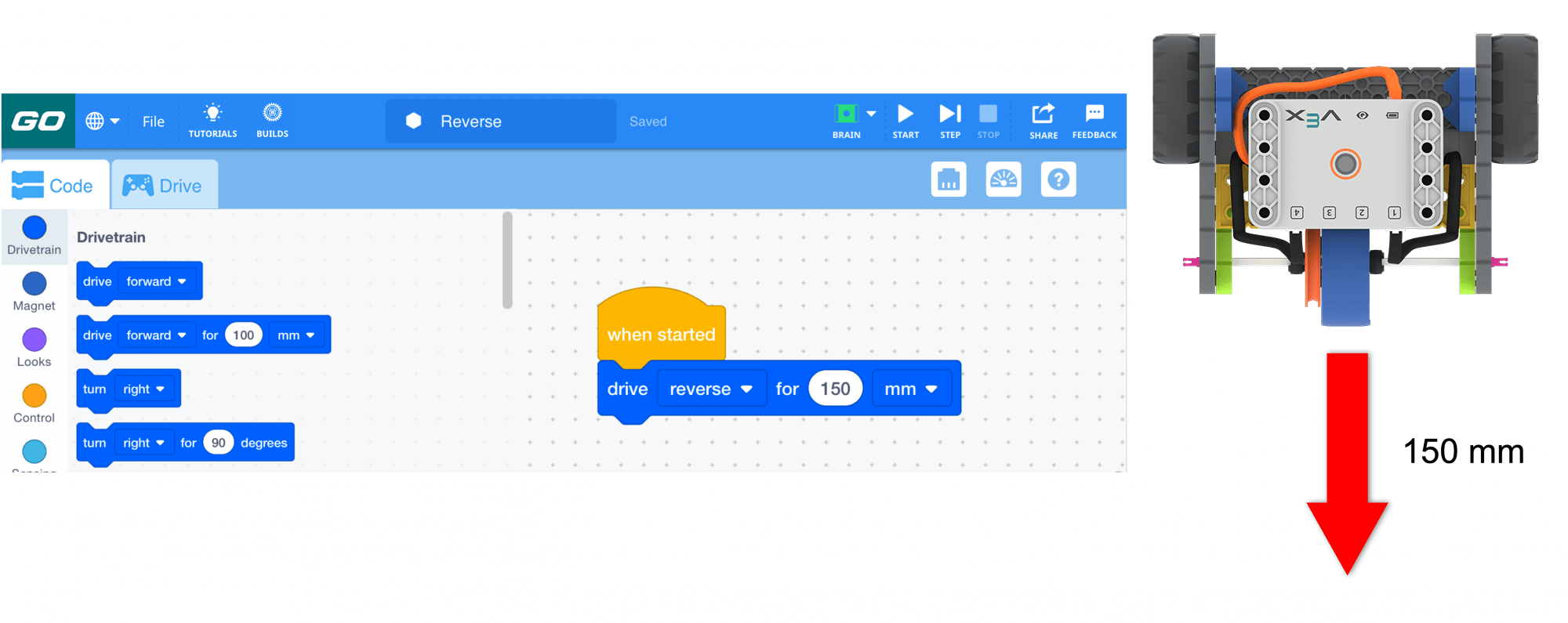
Zeigen Sie, wie Sie den Block [Laufwerk für] in den Arbeitsbereich ziehen und unter dem Block {When started} platzieren.
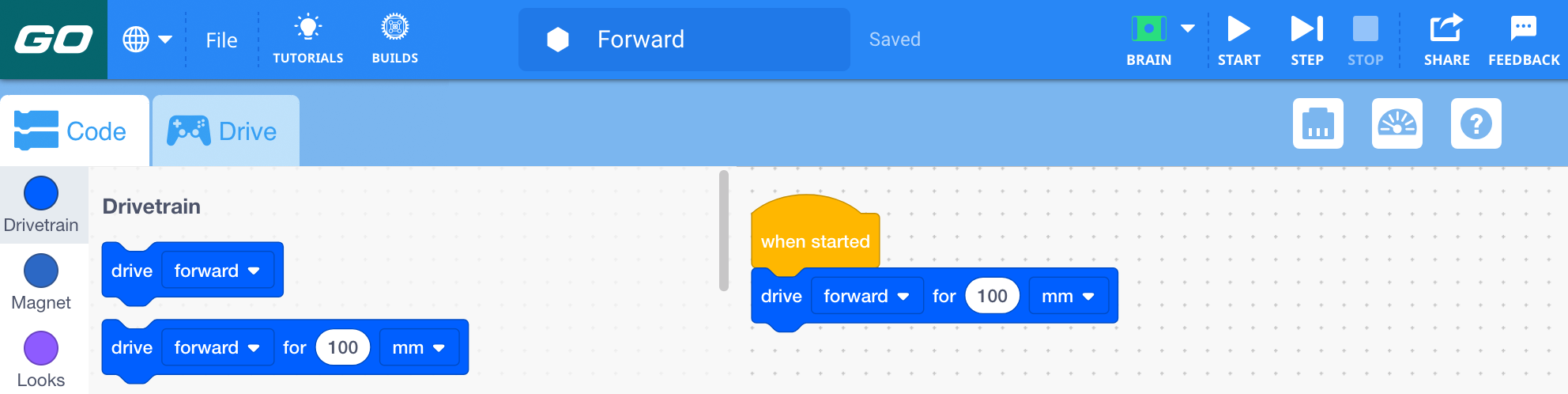
Fügen Sie den Block [Fahren für] hinzu -
Ändern Sie den Parameter des Blocks [Antrieb für] auf 150 mm.
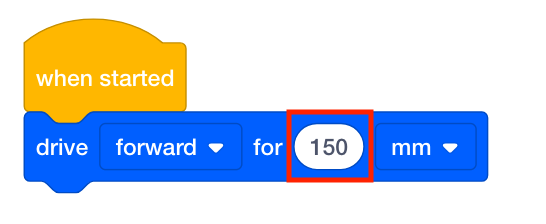
Ändern Sie den Parameter - Machen Sie den Schülern ein Modell, wie Sie anhand der Parameter im Block [Fahren für] vorhersagen können, wie weit sich der Code Base-Roboter bewegen wird. Lassen Sie die Schüler die Codebasis in die Ausgangsposition bringen und dann schätzen, wie weit sich der Roboter bewegen wird. Sie sollten dort eine Markierung platzieren, wo ihrer Meinung nach die Codebasis endet.
-
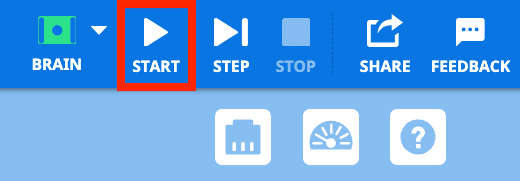
Zeigen Sie den Schülern, wie sie zum Starten des Projekts auf die Schaltfläche „Start“ in der Symbolleiste klicken.
- Nachdem die Schüler das Verhalten beobachtet haben, zeigen Sie ihnen, wie sie zu ihrem Projekt zurückkehren können. Ändern Sie die Parameter des Blocks [Fahren für] von 150 mm auf eine andere Entfernung, beispielsweise 200 mm oder 250 mm. Starten Sie das Projekt dann erneut, um zu sehen, wie sich die Parameteränderung auf die Bewegung des Code Base-Roboters ausgewirkt hat.
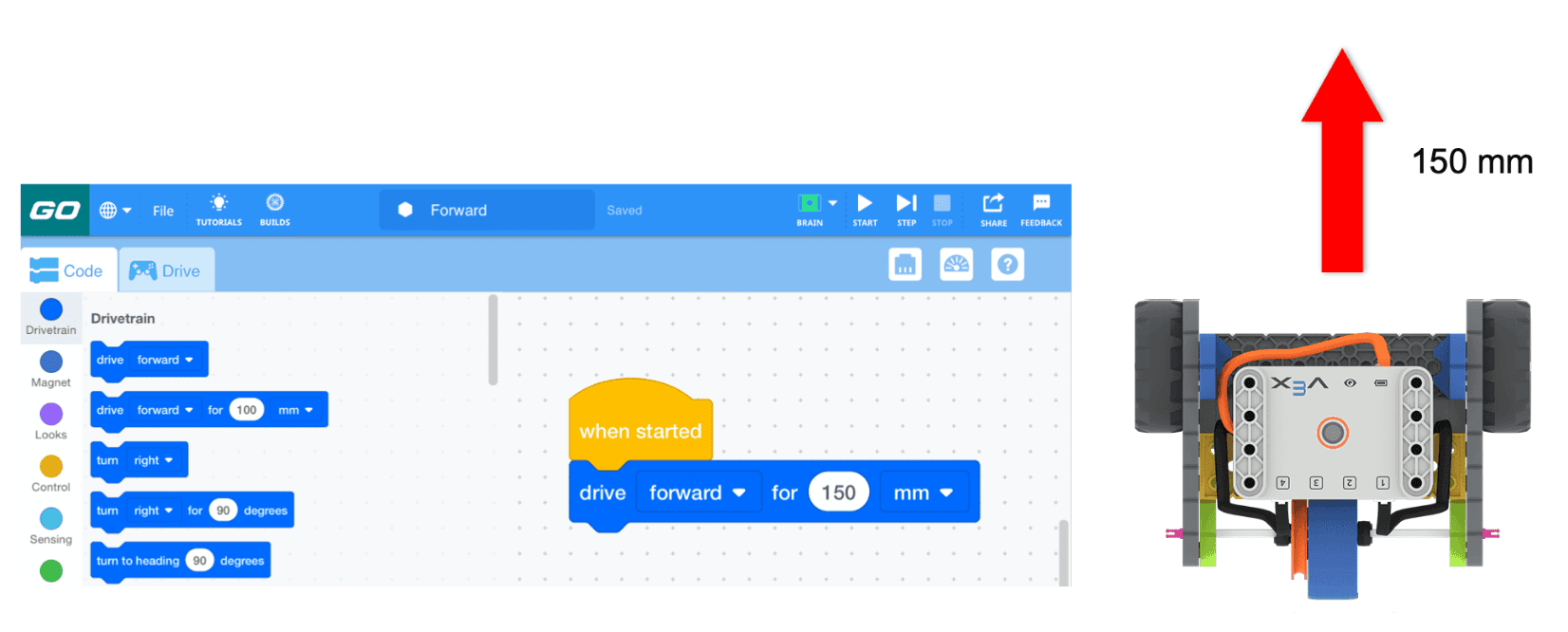
Vorwärts 150 mm - ModerierenModerieren Sie eine Diskussion über die Beobachtungen
der Schüler und die Ziele des Projekts, indem Sie Folgendes fragen:
- Können Sie mir mit Ihren Händen zeigen, wie weit sich der Code Base-Roboter Ihrer Meinung nach bewegen würde, bevor Sie mit dem Projekt begonnen haben?
- Worauf haben Sie den Distanzparameter geändert und warum? Wie weit wird der Code Base-Roboter Ihrer Meinung nach zurücklegen, nachdem die Distanz geändert wurde?
- Wie war die zurückgelegte Strecke im Vergleich zu Ihrer Schätzung?
- Welche Kategorie von Blöcken haben Sie für dieses Projekt verwendet?

Besprechen Sie die Bewegung des Code-Basisroboters - ErinnernErinnern Sie die Schüler daran, dass sie beim Erstellen und Starten ihres Projekts möglicherweise Fragen haben. Erinnern Sie die Schüler daran, dass das Erlernen neuer Konzepte mehrere Anläufe erfordern kann, und ermutigen Sie sie, es noch einmal zu versuchen, wenn der erste Versuch erfolglos bleibt.
- FrageBitten Sie die Schüler, darüber nachzudenken, wie weit sich der Code Base-Roboter bewegen müsste, um durch das Klassenzimmer zu gelangen. Lassen Sie die Schüler einen Zusammenhang herstellen, warum diese Art der Planung im Alltag nützlich ist. Fragen Sie die Schüler, wie ihnen die Fähigkeit, genaue Anweisungen zu planen und zu geben, im Beruf nützlich sein kann. Fragen Sie die Schüler, ob ihnen Berufe einfallen, bei denen Wegbeschreibungen benötigt werden.
Spielpause & Gruppendiskussion
Sobald jede Gruppe ihr Projektabgeschlossen hat, kommt ihr zu einem kurzen Gespräch zusammen.
- Ist der Code Base-Roboter dort gelandet, wo Sie ihn vermutet haben? Wenn nicht, wie nahe kam es Ihrer Vorhersage?
- Wie haben Sie Ihr Projekt bearbeitet? Für welche neue Distanz hast Du Dich entschieden?
- Hatten Sie Schwierigkeiten beim Ändern der Distanz im Block [Fahren für]?
Antriebsstrang vorstellen:
- Nachdem wir nun erkundet haben, wie wir mit VEXcode GO unseren Code Base-Roboter vorwärts fahren lassen, stellt sich die Frage, warum es Ihrer Meinung nach einen Abschnitt mit Blöcken zum Thema „Antriebsstrang“ gibt?
- Was ist Ihrer Meinung nach ein Antriebsstrang? Können Sie Ihre Überlegungen erläutern?
- Können Sie mir anhand von Gesten zeigen, wo sich Ihrer Meinung nach der Antriebsstrang beim Code Base-Roboter befindet?
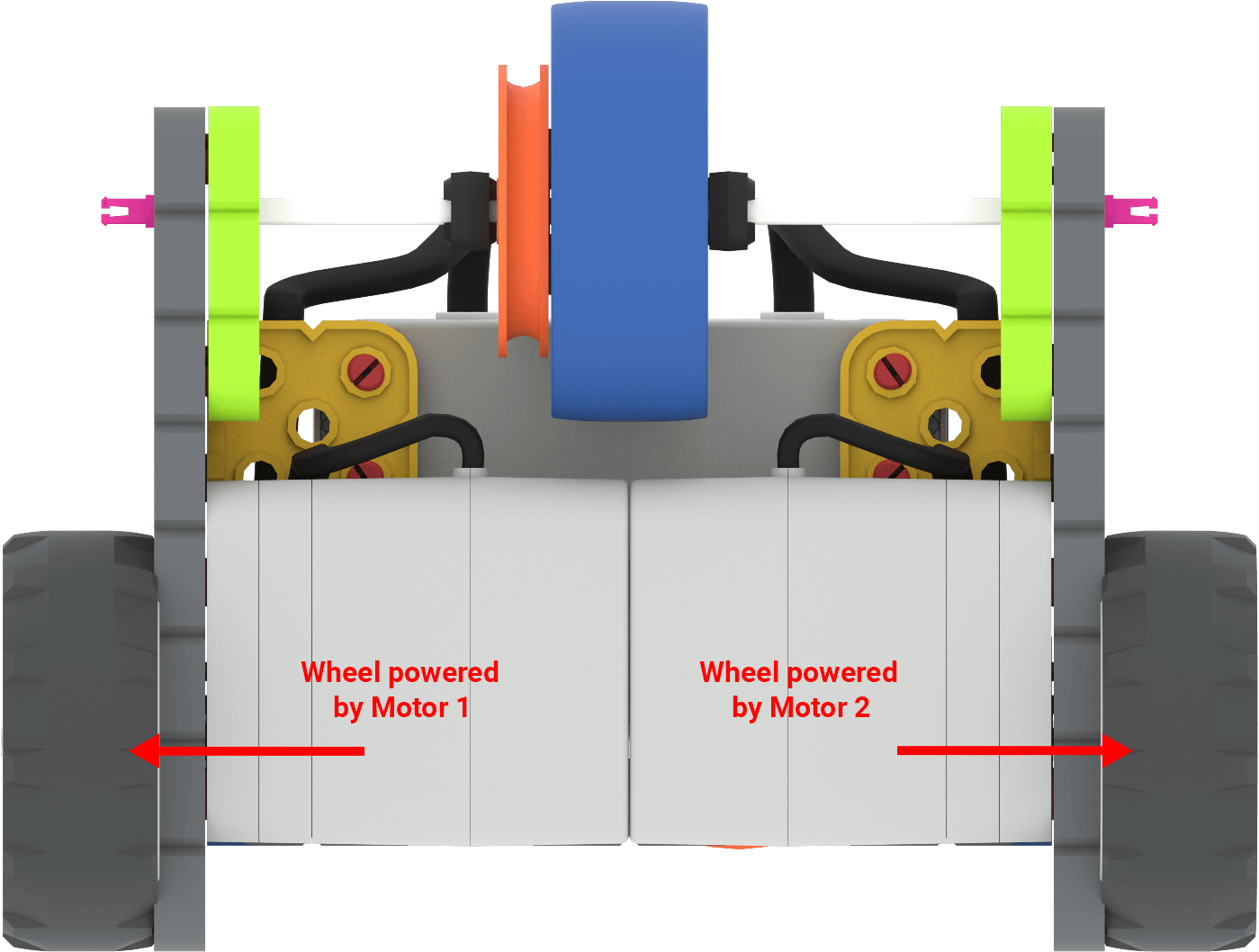
- Können Sie auf die Unterseite Ihres Code Base-Roboters schauen und erkennen, wo sich die Motoren in diesem Antriebsstrang befinden und an welchen Rädern sie befestigt sind?
Teil 2 - Schritt für Schritt
- AnweisungenWeisen Sie die Schüler an, herauszufinden, wie sie
ihren Code Base-Roboter vorwärts und rückwärts bewegen können!
Zu Beginn sollte jede Gruppe über ein Gerät, VEXcode GO, mindestens einen Platzierungsmarker und eine erstellte Codebasis verfügen. Sehen Sie sich die Animation unten an, um zu sehen, wie sich die Codebasis rückwärts bewegt. In der Animation startet die Codebasis in der oberen linken Ecke der Kachel, fährt 150 mm rückwärts und stoppt dann. Anschließend kehrt er in die Ausgangsposition zurück und fährt 75 mm rückwärts.
Videodatei - ModellModell für Studenten, wie sie VEXcode GO auf einem Gerät
starten und ihr Projekt in „Reverse“ umbenennen. Zeigen Sie den Schülern, dass
sie „Speichern unter“ auswählen müssen, um dieses Projekt getrennt von ihrem
ersten zu speichern.
Beachten Sie die Schritte im Öffnen und speichern Sie a Projekt Weitere Informationen finden Sie im Artikel.
-
Modellieren Sie, wie der Parameter im Block [Antrieb für] geändert wird, damit die Codebasis rückwärts fährt.
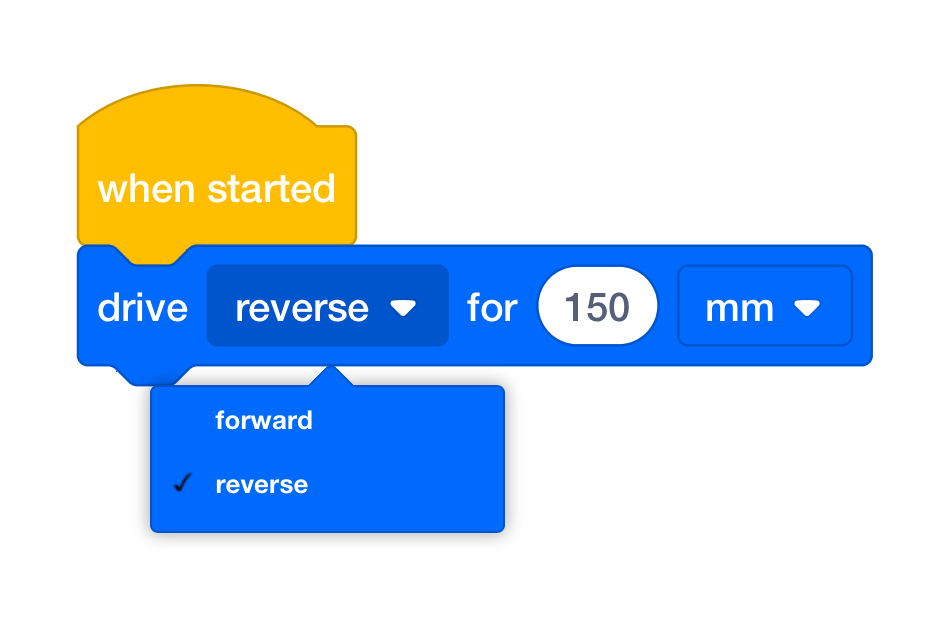
Parameter ändern (umkehren) - Verwenden Sie denselben Schätzprozess wie in Spielteil 1. Lassen Sie die Schüler die Codebasis in die Ausgangsposition bringen und dann schätzen, wie weit sich der Roboter bewegen wird. Sie sollten dort eine Markierung platzieren, wo ihrer Meinung nach die Codebasis endet.
-
Lassen Sie die Schüler mit ihren Projekten beginnen. Sie können Sie müssen sie an die Schritte dazu erinnernSchließen Sie ein VEX GO Brain an Wenn Verbindungsprobleme auftreten.
Rückwärtsgang 150mm - Nachdem die Schüler das Verhalten beim Rückwärtsfahren beobachtet haben, zeigen Sie ihnen, wie sie zu ihrem Projekt zurückkehren können. Anschließend sollten Sie ihr Projekt inVorwärts“ undRückwärts“ umbenennen. Refer to the steps in the Open and Save VEX Library article for more information.
-
Zeigen Sie den Schülern, wie ein zweiter [Drive for]-Block hinzugefügt wird. In einem [Fahren für]-Block sollte der Roboter vorwärts fahren, und im zweiten Block sollte er rückwärts fahren. Modellieren Sie, wie die Parameter der [Antrieb für]-Blöcke bearbeitet werden, und starten Sie das Projekt dann erneut, um zu sehen, wie sich die Änderung der Parameter auf die Bewegung des Code Base-Roboters ausgewirkt hat.
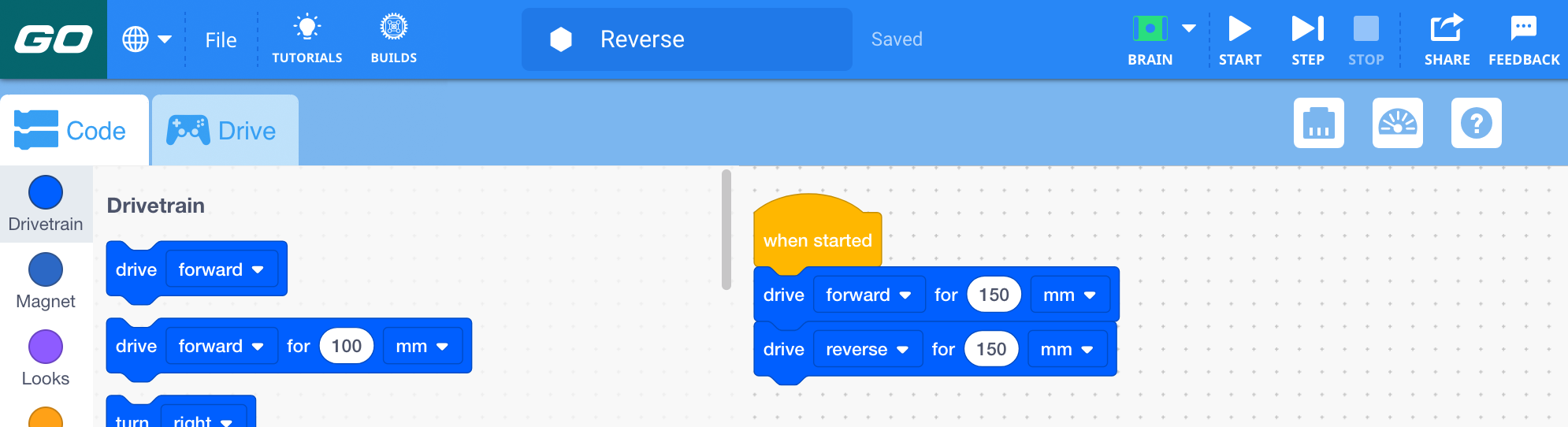
Vorwärts und Rückwärts
-
- ModerierenModerieren Sie eine Diskussion, während die Schüler
ihre Projekte bearbeiten und das Verhalten des Roboters beobachten, indem Sie
Folgendes fragen:
- Können Sie mir mit Ihren Händen zeigen, wie weit sich der Code Base-Roboter Ihrer Meinung nach bewegen würde, bevor Sie das Projekt ausgeführt haben?
- Worauf haben Sie den Distanzparameter geändert und warum? Wie weit wird der Code Base-Roboter Ihrer Meinung nach zurücklegen, nachdem die Distanz geändert wurde?
- Haben Sie beim Hinzufügen eines weiteren [Fahren für]-Blocks die gleiche Distanz für die einzelnen Blöcke eingestellt? Müssen sie gleich sein? Warum oder warum nicht?
- Wenn mein Code Base-Roboter so codiert ist, dass er 100 mm vorwärts fährt, wie weit müsste ich die Distanz ändern, wenn ich möchte, dass er doppelt so weit fährt?
Besprechen Sie die Bewegung des Code-Basisroboters - ErinnernErinnern Sie die Schüler daran, dass sie beim Bearbeiten und Starten ihres Projekts möglicherweise Fragen haben. Erinnern Sie die Schüler daran, dass das Erlernen neuer Konzepte möglicherweise mehrere Versuche erfordert, und ermutigen Sie sie, es erneut zu versuchen, wenn es ihnen nicht gelingt, die Blöcke im Projekt hinzuzufügen und zu bearbeiten.
- FrageBitten Sie die Schüler, darüber nachzudenken, wie sich der Code Base-Roboter bewegen müsste, wenn er bis zur Tür und dann wieder zurück zum Ausgangspunkt fahren soll. Welche Arten von Aufgaben oder Arbeiten könnte der Code Base-Roboter jetzt ausführen, da er sich vorwärts und rückwärts bewegen kann? Bitten Sie die Schüler, eine Aufgabe vorzuschlagen, die der Code Base-Roboter jetzt mit Vorwärts- und Rückwärtsbewegungen erledigen könnte.
Optional: Gruppen können ihren Code Base-Roboter an diesem Punkt des Erlebnisses bei Bedarf dekonstruieren. Sie werden in den nachfolgenden Übungen denselben Build verwenden, es handelt sich also um eine Option für Lehrer.