
Jugar
Parte 1 - Paso a paso
- InstruyaInstruya a los estudiantes que explorarán cómo hacer
avanzar su robot Code Base. Antes de comenzar el proyecto, predecirán dónde
terminará el robot Code Base. Mire la animación a continuación para ver
ejemplos del Código Base avanzando para diferentes distancias. En la
animación, el código base comienza en la esquina inferior izquierda del
mosaico y primero avanza 150 mm y luego se detiene. Luego aparece nuevamente
en el punto de partida, avanza 75 mm y se detiene.
Archivo de vídeo
- ModeloModelo sobre cómo iniciar VEXcode GO en un dispositivo y
crear un proyecto que haga avanzar la base de código con el bloque [Conducir
para].
- Modele para los estudiantes los pasos del Abrir y guardar un proyecto Artículo de la biblioteca VEX y tenerlos siga los pasos para abrir y guardar su proyecto.
- Indique a los estudiantes que nombren su proyecto Adelante.
- Tener las estudiantes entonces conectar el cerebro de su Código Base robot a su dispositivo.
- Una vez que los estudiantes hayan nombrado su proyecto y conectado el Cerebro a su dispositivo, deberán seguir los pasos para configurar el robot Code Base. Modele los pasos de la Configurar una base de código Biblioteca VEX artículo y asegúrese de que los estudiantes puedan ver los bloques Drivetrain en el Caja de instrumento.
-
Muestra cómo arrastrar el bloque [Unidad para] al espacio de trabajo y colocarlo debajo del bloque {Cuando empezó}.
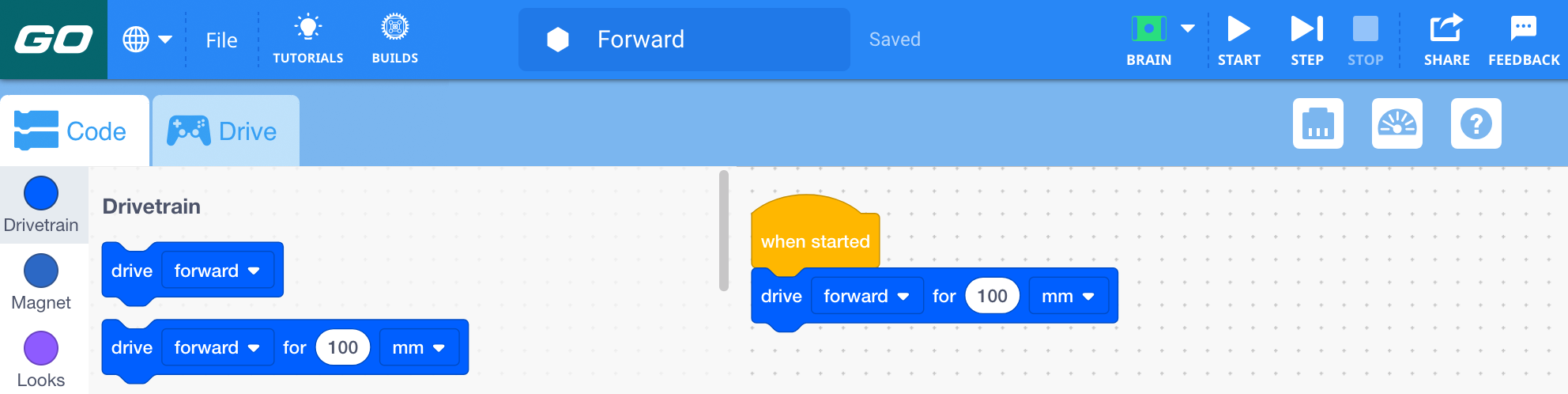
Agregue el bloque [Unidad para] -
Cambie el parámetro del bloque [Unidad para] a 150 mm.
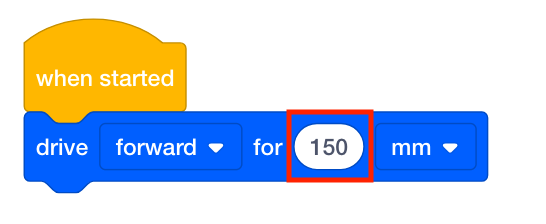
Cambiar el parámetro - Modelo para que los estudiantes puedan predecir qué tan lejos se moverá el robot Code Base en función de los parámetros del bloque [Drive for]. Pida a los estudiantes que coloquen la base del código en la posición inicial y luego calculen qué tan lejos se moverá el robot. Deberían colocar un marcador donde creen que se detendrá el Código Base.
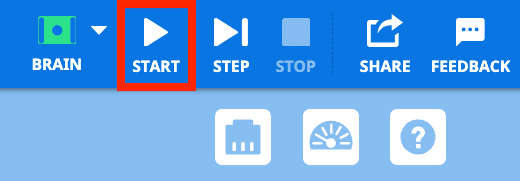
-
Modelo para que los estudiantes sepan cómo seleccionar el botón “Iniciar” en la barra de herramientas para comenzar el proyecto.
- Una vez que los estudiantes hayan observado el comportamiento, modele para ellos cómo regresar a su proyecto y editar los parámetros del bloque [Drive for] de 150 mm a otra distancia, como 200 mm o 250 mm. Luego, inicie el proyecto nuevamente para ver cómo el cambio de parámetros afectó el movimiento del robot Code Base.
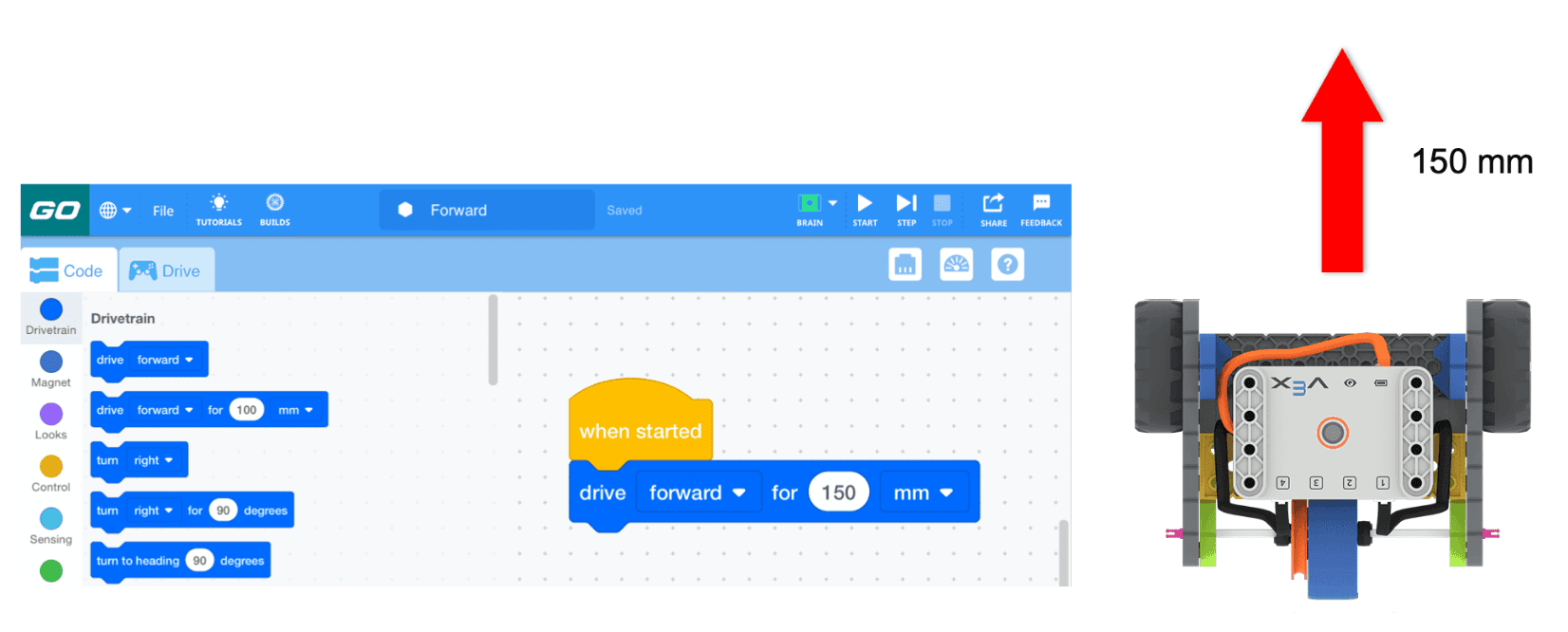
Adelante 150 mm - FacilitarFacilite una discusión en torno a las observaciones de
los estudiantes y los objetivos del proyecto preguntando lo siguiente:
- ¿Puedes mostrarme usando tus manos qué tan lejos creías que se movería el robot Code Base antes de comenzar el proyecto?
- ¿A qué cambiaste el parámetro de distancia y por qué? ¿Qué distancia crees que recorrerá el robot Code Base ahora que se ha cambiado la distancia?
- ¿Cómo se compara la distancia recorrida con tu estimación?
- ¿Qué categoría de bloques utilizaste para este proyecto?

Discuta el movimiento del robot del código base - RecordarRecuerde a los estudiantes que pueden tener preguntas cuando estén creando y comenzando su proyecto. Recuerde a los estudiantes que aprender nuevos conceptos puede requerir varios intentos y anímelos a intentarlo nuevamente si no tienen éxito en el primer intento.
- PreguntaPida a los estudiantes que piensen qué tan lejos tendría que moverse el robot Code Base para atravesar el aula. Pida a los estudiantes que establezcan una conexión sobre por qué este tipo de planificación es útil en la vida cotidiana. Pregúnteles a los estudiantes cómo poder planificar y dar instrucciones precisas podría ser útil para un trabajo. Pregunte a los estudiantes si pueden pensar en algún trabajo en el que se necesiten instrucciones.
Pausa a mitad de juego & Discusión en grupo
Tan pronto como cada grupo haya completado su proyecto, reúnanse para una breve conversación.
- ¿El robot Code Base terminó donde pensabas que iba? Si no, ¿qué tan cerca estuvo de su predicción?
- ¿Cómo editaste tu proyecto? ¿Qué nueva distancia elegiste?
- ¿Encontraste alguna dificultad al cambiar la distancia en el bloque [Conducir hacia]?
Presentar el tren motriz:
- Ahora que exploramos cómo usar VEXcode GO para permitir que nuestro robot Code Base avance, ¿por qué crees que hay una sección de bloques “Drivetrain”?
- ¿Qué crees que es un sistema de transmisión? ¿Puedes explicar tu pensamiento?
- ¿Puedes mostrarme mediante gestos dónde crees que está la transmisión en el robot Code Base?
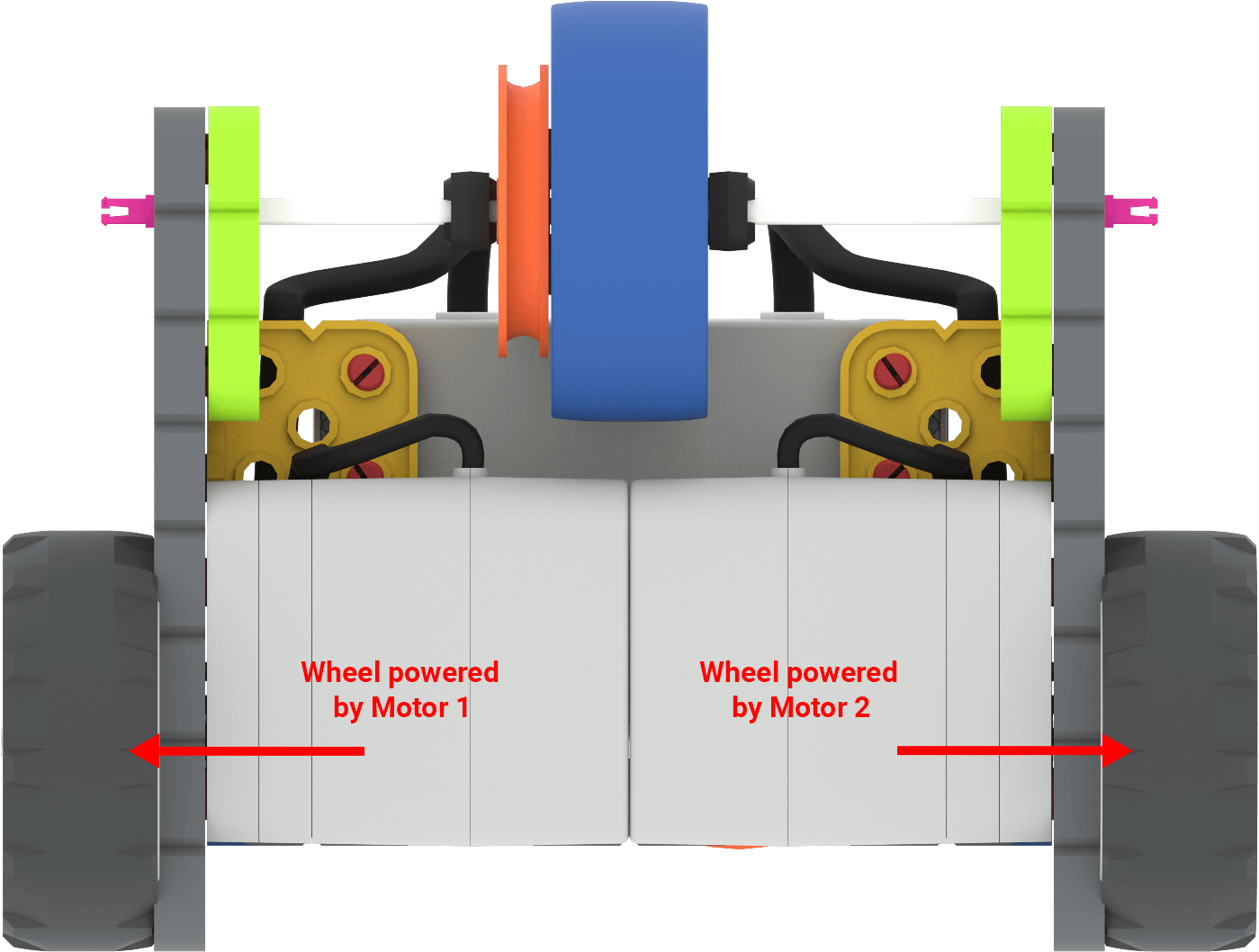
- ¿Puedes mirar la parte inferior de tu robot Code Base e identificar dónde están los motores en este tren motriz y a qué ruedas están conectados?
Parte 2 - Paso a paso
- InstruyaInstruya a los estudiantes que explorarán cómo mover su
robot Code Base hacia adelante y hacia atrás.
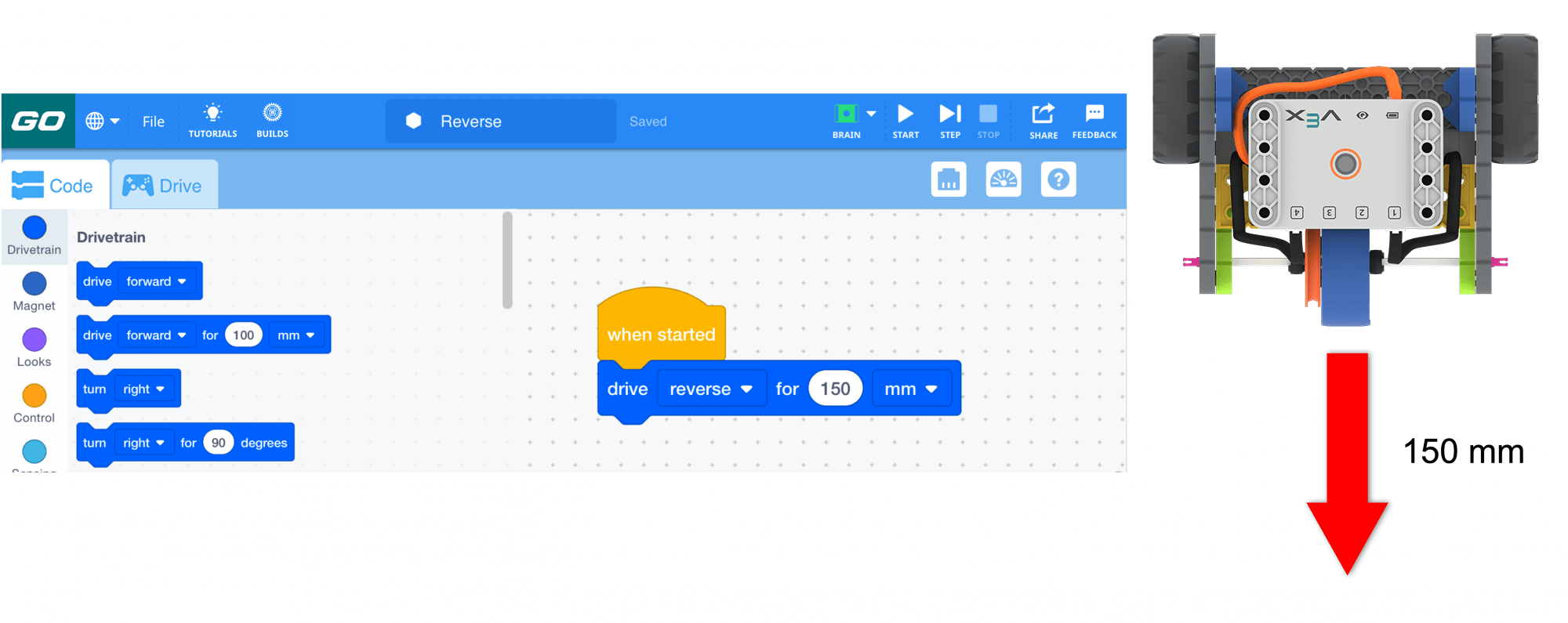
Para comenzar, cada grupo debe tener un dispositivo, VEXcode GO, al menos un marcador de ubicación y una base de código construida. Mire la animación a continuación para ver cómo el código base se mueve en sentido inverso. En la animación, el código base comienza en la esquina superior izquierda del mosaico, avanza en reversa 150 mm y luego se detiene. Luego vuelve a la posición inicial y avanza hacia atrás durante 75 mm.
Archivo de vídeo - ModeloModelo para que los estudiantes aprendan cómo iniciar
VEXcode GO en un dispositivo y cambiar el nombre de su proyecto a Reverse.
Indique a los estudiantes que seleccionen “Guardar como” para guardar este
proyecto por separado del primero.
Consulte los pasos en el Abrir y guardar un Proyecto artículo para más información.
-
Modele cómo cambiar el parámetro en el bloque [Conducir para] para que el Código Base conduzca en sentido inverso.
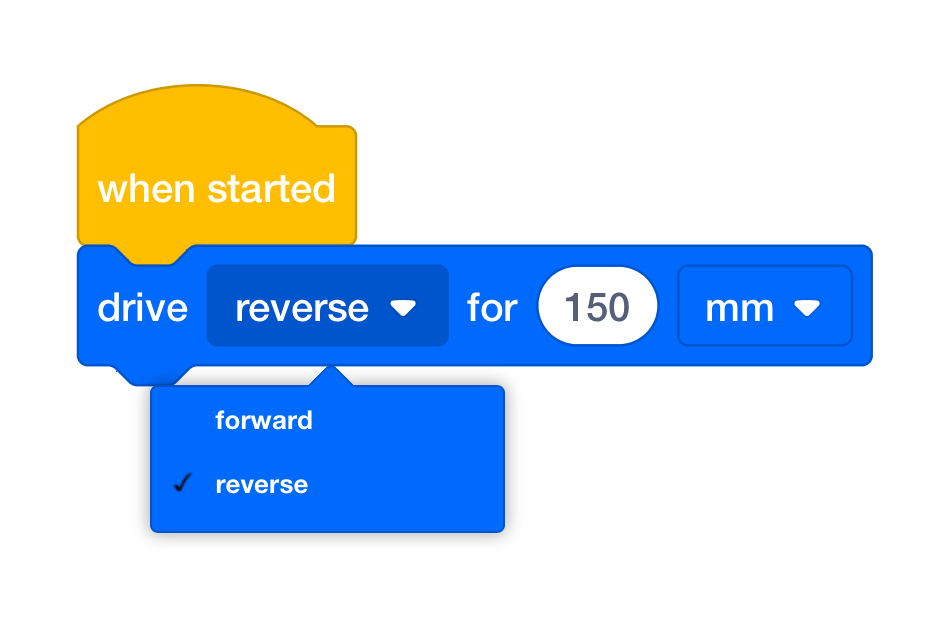
Cambiar el parámetro (revertir) - Utilice el mismo proceso de estimación que en la Parte 1 del juego. Pida a los estudiantes que coloquen la base del código en la posición inicial y luego calculen qué tan lejos se moverá el robot. Deberían colocar un marcador donde creen que se detendrá el Código Base.
-
Haga que los estudiantes comiencen sus proyectos. Es posible que necesites para recordarles los pasos a seguir Conecte un cerebro VEX GO si ocurren problemas de conexión.
Marcha atrás 150 mm - Una vez que los estudiantes hayan observado el comportamiento de conducir en reversa, modele para ellos cómo volver a su proyecto. Luego deberían cambiar el nombre de su proyectoAdelante y a Retroceder. Consulte los pasos en el Abrir y guardar Artículo de la biblioteca VEX para más información.
-
Modele para los estudiantes cómo agregar un segundo bloque [Impulsar]. Un bloque [Drive for] debe hacer que el robot avance y el segundo bloque debe hacer que el robot avance en reversa. Modele cómo editar los parámetros de los bloques [Drive for] y luego inicie el proyecto nuevamente para ver cómo el cambio en los parámetros afectó el movimiento del robot Code Base.
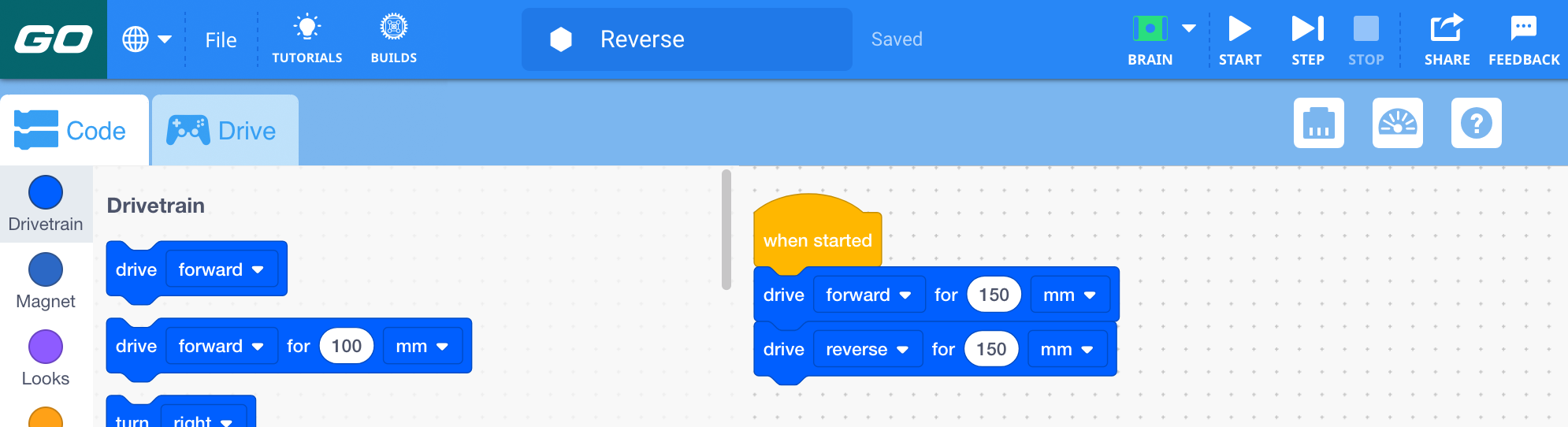
Adelante y atrás
-
- FacilitarFacilite una discusión mientras los estudiantes editan
sus proyectos y observan el comportamiento del robot preguntando lo siguiente:
- ¿Puedes mostrarme usando tus manos qué tan lejos creías que se movería el robot Code Base antes de ejecutar el proyecto?
- ¿A qué cambiaste el parámetro de distancia y por qué? ¿Qué distancia crees que recorrerá el robot Code Base ahora que se ha cambiado la distancia?
- Cuando agregaste otro bloque [Conducir por], ¿los configuraste para que recorrieran la misma distancia? ¿Tienen que ser iguales? ¿Por qué o por qué no?
- Si mi robot Code Base está codificado para avanzar 100 mm, ¿cuánto tendría que cambiar la distancia si quisiera que avanzara el doble?
Discuta el movimiento del robot del código base - RecordarRecordar a los estudiantes que pueden tener preguntas cuando están editando y comenzando su proyecto. Recuerde a los estudiantes que aprender nuevos conceptos puede requerir varios intentos y anímelos a intentarlo nuevamente si no tienen éxito al agregar y editar los bloques en el proyecto.
- PreguntePida a los estudiantes que piensen en cómo debería moverse el robot Code Base, si quisieran que llegara hasta la puerta y luego regresara al punto de partida. ¿Qué tipos de tareas o trabajos podría realizar ahora el robot Code Base que puede moverse hacia adelante y hacia atrás? Pídeles a los estudiantes que sugieran una tarea que el robot Code Base podría completar ahora usando movimientos hacia adelante y hacia atrás.
Opcional: Los grupos pueden deconstruir su robot Code Base si es necesario en este punto de la experiencia. Utilizarán la misma construcción en los laboratorios posteriores, por lo que esta es una opción para el docente.