
Jouer
Partie 1 – Étape par étape
- InstruireExpliquez aux élèves qu'ils vont découvrir comment
faire avancer leur robot Code Base ! Avant de commencer le projet, ils
prédiront où le robot Code Base finira. Regardez l'animation ci-dessous pour
voir des exemples de la base de code évoluant sur différentes distances. Dans
l'animation, la base de code démarre dans le coin inférieur gauche de la tuile
et avance d'abord de 150 mm puis s'arrête. Il revient ensuite à l'emplacement
de départ, avance de 75 mm et s'arrête.
Fichier vidéo
- ModèleModèle comment lancer VEXcode GO sur un appareil et créer
un projet qui fait avancer la base de code avec le bloc [Drive for].
- Modéliser pour les élèves les étapes du Ouvrir et enregistrer un projet Article de la bibliothèque VEX et obtenez-les suivre les étapes pour ouvrir et sauvegarder son projet.
- Demandez aux élèves de nommer leur projet Suivant.
- Demandez alors aux étudiants connecter le cerveau de leur base de code robot à leur appareil.
- Une fois que les élèves ont nommé leur projet et connecté le cerveau à leur appareil, ils doivent suivre les étapes de configuration du robot Code Base. Modélisez les étapes du Configurer une base de code Bibliothèque VEX article et assurez-vous que les élèves peuvent voir les blocs Drivetrain dans le Boîte à outils.
-
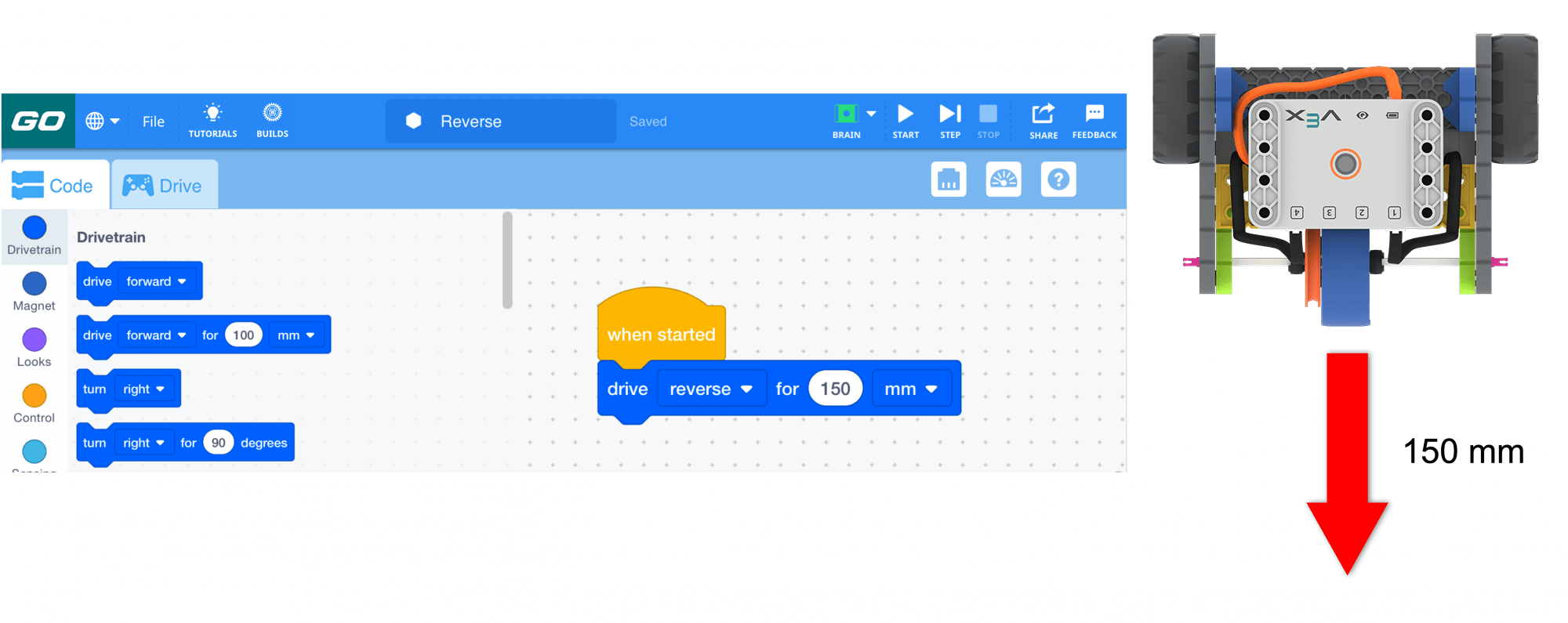
Montrez comment faire glisser le bloc [Drive for] dans l’espace de travail et le placer sous le bloc {When started}.
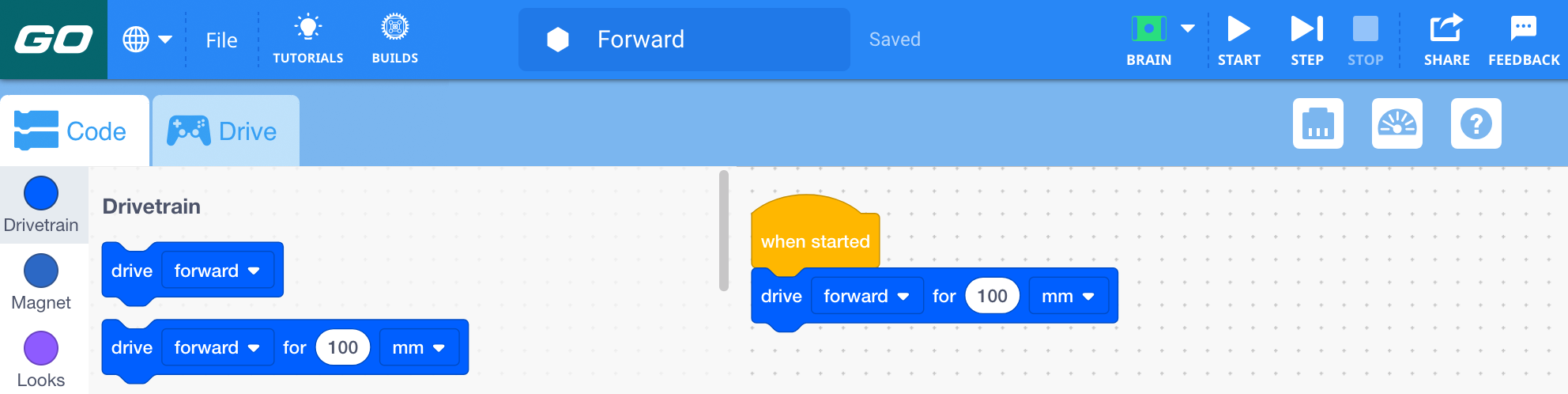
Ajoutez le bloc [Drive for] -
Modifiez le paramètre du bloc [Drive for] à 150 mm.
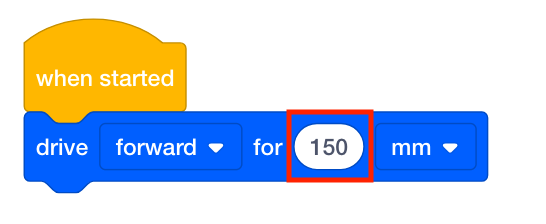
Changer le paramètre - Modèle permettant aux élèves de prédire jusqu'où le robot Code Base se déplacera en fonction des paramètres du bloc [Drive for]. Demandez aux élèves de placer la base de code dans la position de départ, puis d’estimer la distance à laquelle le robot se déplacera. Ils devraient placer un marqueur là où ils pensent que la base de code s'arrêtera.
-
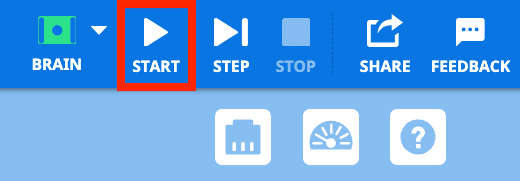
Modèle pour les étudiants montrant comment sélectionner le bouton « Démarrer » dans la barre d’outils pour démarrer le projet.
- Une fois que les élèves ont observé le comportement, montrez-leur comment revenir à leur projet, modifiez les paramètres du bloc [Conduire pour] de 150 mm à une autre distance, comme 200 mm ou 250 mm. Ensuite, redémarrez le projet pour voir comment le changement de paramètres a affecté le mouvement du robot Code Base.
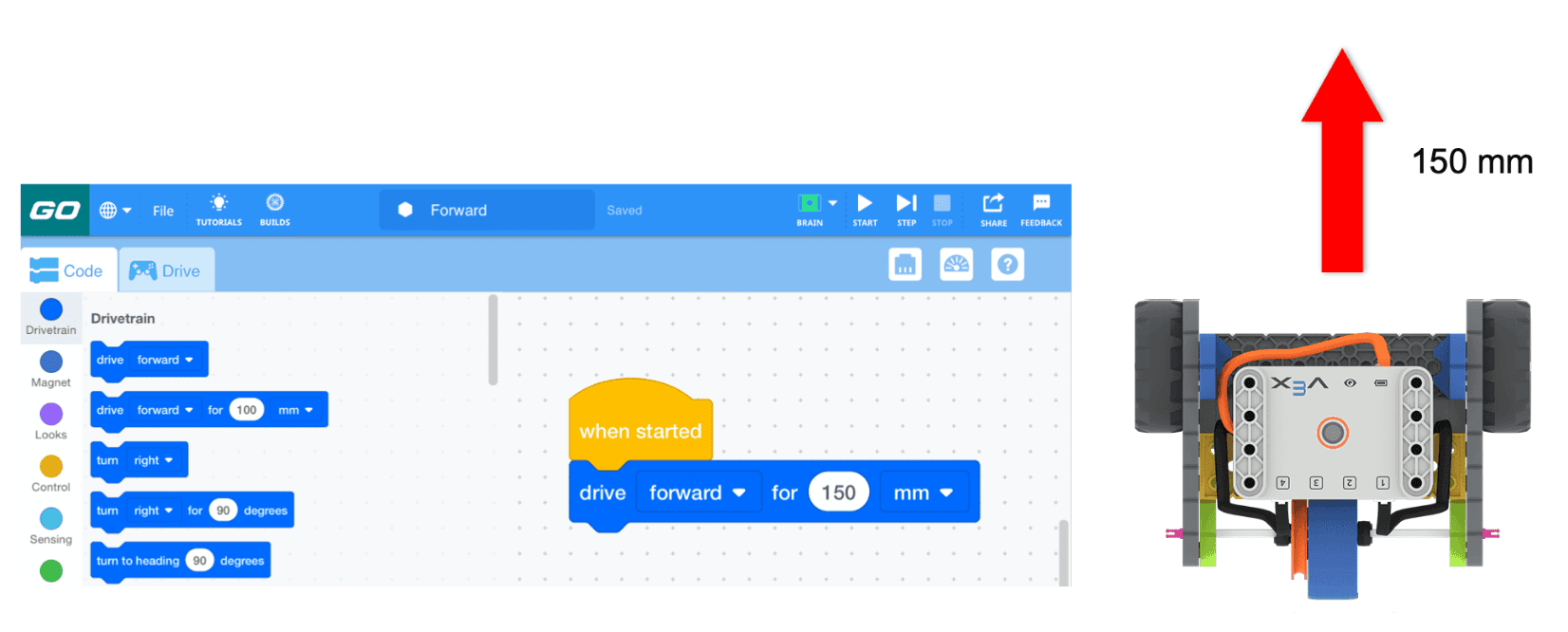
Avancer 150 mm - AnimerAnimez une discussion autour des observations des élèves
et des objectifs du projet en posant les questions suivantes :
- Pouvez-vous me montrer en utilisant vos mains jusqu'où vous pensiez que le robot Code Base se déplacerait avant de commencer le projet ?
- À quoi avez-vous modifié le paramètre de distance et pourquoi ? Jusqu'où pensez-vous que le robot Code Base parcourra maintenant que la distance a été modifiée ?
- Comment la distance parcourue se compare-t-elle à votre estimation ?
- Quelle catégorie de blocs avez-vous utilisé pour ce projet ?

Discutez du mouvement du robot de base du code - RappelerRappelez aux élèves qu’ils peuvent avoir des questions lorsqu’ils créent et démarrent leur projet. Rappelez aux élèves que l’apprentissage de nouveaux concepts peut nécessiter plusieurs essais et encouragez-les à réessayer s’ils échouent du premier coup.
- DemanderDemandez aux élèves de réfléchir à la distance que le robot Code Base devrait parcourir pour traverser la classe. Demandez aux élèves d’établir un lien avec la raison pour laquelle ce type de planification est utile dans la vie de tous les jours. Demandez aux élèves comment le fait de pouvoir planifier et donner des instructions précises pourrait être utile pour un travail ? Demandez aux élèves s’ils peuvent penser à des emplois pour lesquels des instructions sont nécessaires ?
Pause à mi-jeu & Discussion de groupe
Dès que chaque groupe a terminé son projet, réunissez-vous pour une brève conversation.
- Le robot Code Base est-il arrivé là où vous pensiez qu'il allait ? Si ce n’est pas le cas, dans quelle mesure était-ce proche de votre prédiction ?
- Comment avez-vous édité votre projet ? Quelle nouvelle distance avez-vous choisie ?
- Avez-vous rencontré des difficultés lors du changement de la distance dans le bloc [Conduire pour] ?
Présentation de la transmission :
- Maintenant que nous avons exploré comment utiliser VEXcode GO pour permettre à notre robot Code Base d'avancer, pourquoi pensez-vous qu'il existe une section « Drivetrain » de blocs ?
- Selon vous, qu'est-ce qu'une transmission ? Pouvez-vous expliquer votre réflexion ?
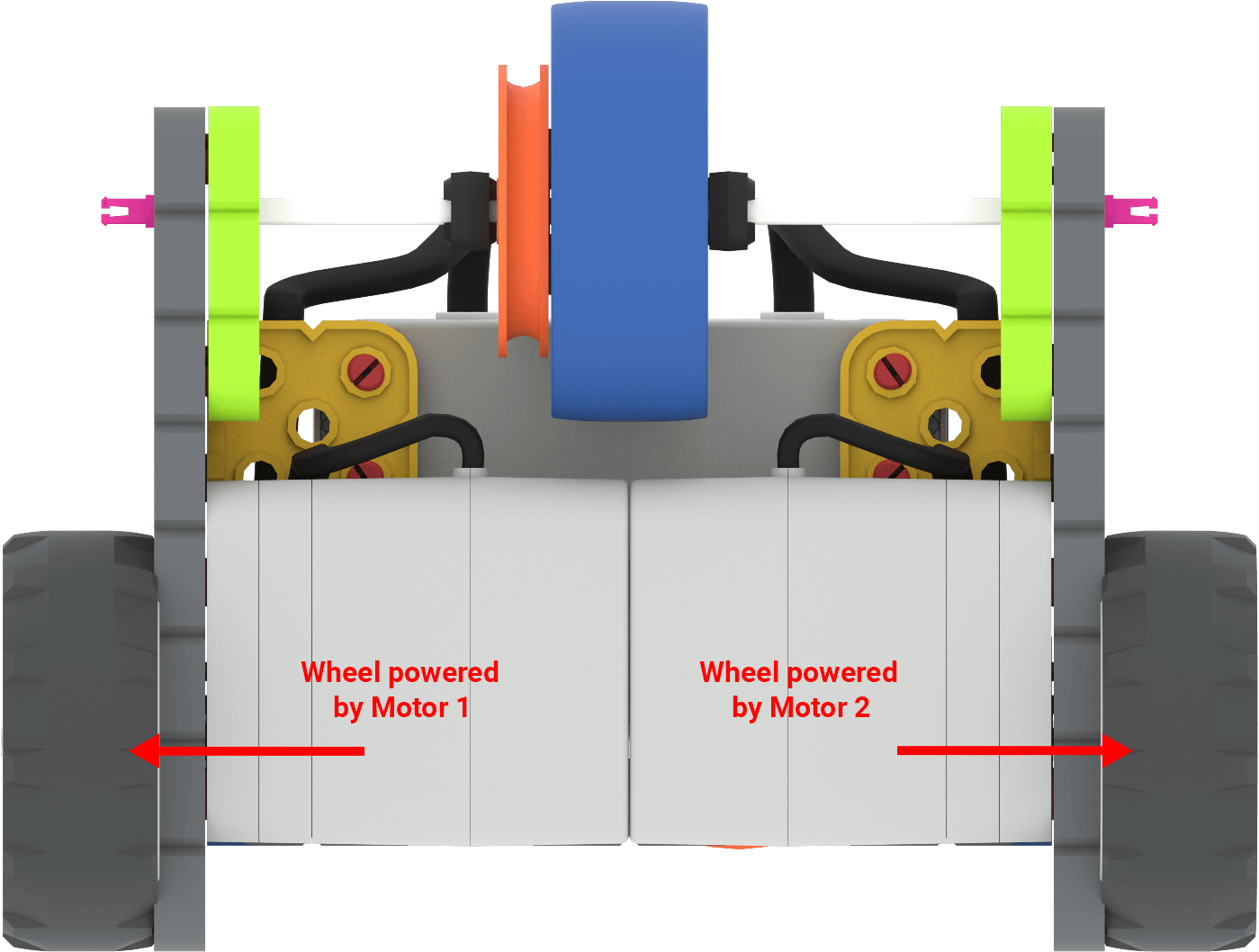
- Pouvez-vous me montrer à l'aide de gestes où vous pensez que se trouve la transmission sur le robot Code Base ?
- Pouvez-vous regarder le bas de votre robot Code Base et identifier où se trouvent les moteurs dans cette transmission et à quelles roues ils sont attachés ?
Partie 2 – Étape par étape
- InstruireExpliquez aux élèves qu'ils vont découvrir comment
déplacer leur robot Code Base vers l'avant et vers l'arrière !
Pour commencer, chaque groupe doit disposer d’un appareil, VEXcode GO, d’au moins un marqueur de placement et d’une base de code construite. Regardez l'animation ci-dessous pour voir comment la base de code évolue en sens inverse. Dans l'animation, la base de code démarre dans le coin supérieur gauche de la tuile, et avance en marche arrière sur 150 mm, puis s'arrête. Il revient ensuite à la position de départ et recule sur 75 mm.
Fichier vidéo - ModèleModèle pour les étudiants expliquant comment lancer
VEXcode GO sur un appareil et renommer leur projet en Reverse. Montrez aux
élèves comment sélectionner « Enregistrer sous » pour enregistrer ce projet
séparément du premier.
Refer to the steps in the Open and Save a Project article for more information.
-
Modélisez comment modifier le paramètre sur le bloc [Drive for] pour que la base de code conduise en marche arrière.
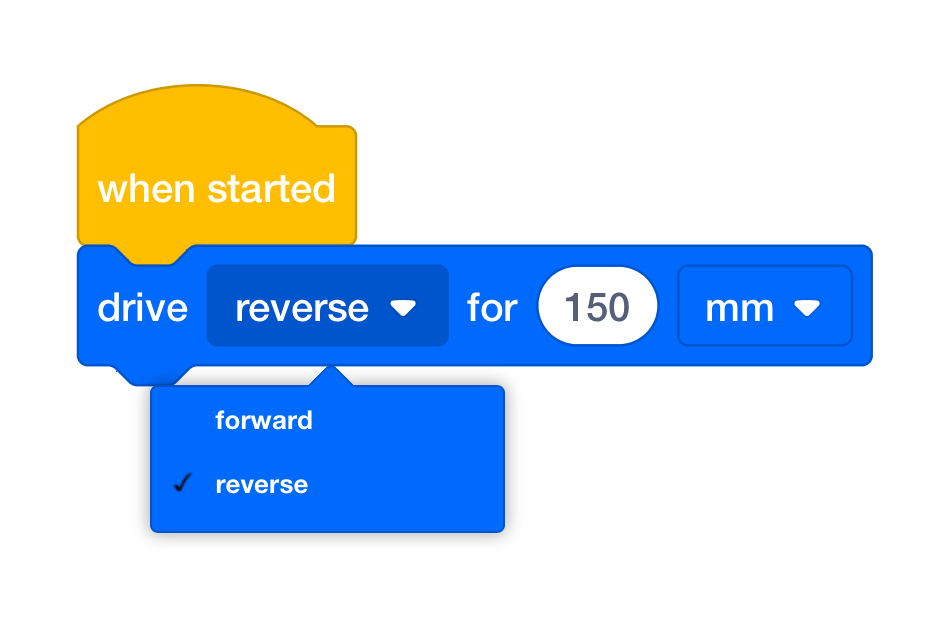
Changer le paramètre (inverse) - Utilisez le même processus d’estimation que dans la partie 1 de Play. Demandez aux élèves de placer la base de code dans la position de départ, puis d’estimer la distance à laquelle le robot se déplacera. Ils devraient placer un marqueur là où ils pensent que la base de code s'arrêtera.
-
Demandez aux élèves de démarrer leurs projets. You may need to remind them of the steps to Connect a VEX GO Brain if connection issues occur.
Inversé 150mm - Une fois que les élèves ont observé le comportement de la conduite en marche arrière, montrez-leur comment revenir à leur projet. Ils devraient ensuite renommer leur projetForward et Reverse. Reportez-vous aux étapes du Ouvrir et enregistrer Article de la bibliothèque VEX pour plus d'informations.
-
Modèle pour les élèves montrant comment ajouter un deuxième bloc [Drive for]. Un bloc [Conduire pour] doit indiquer que le robot roule vers l'avant, et le second doit indiquer que le robot roule vers l'arrière. Modélisez comment modifier les paramètres des blocs [Drive for], puis redémarrez le projet pour voir comment la modification des paramètres a affecté le mouvement du robot Code Base.
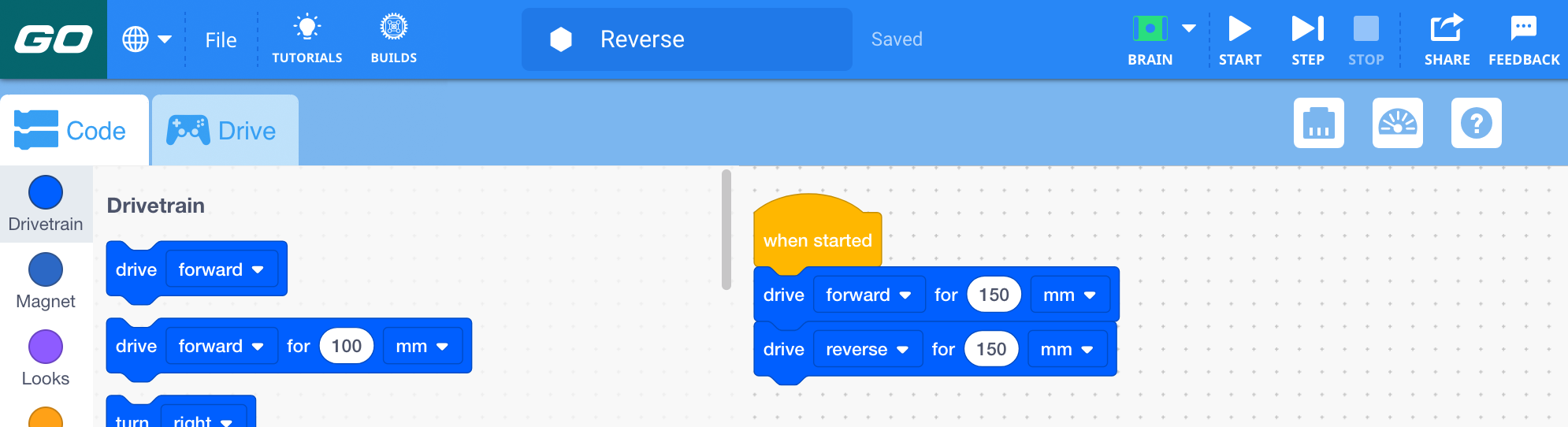
Avant et arrière
-
- AnimerAnimez une discussion pendant que les élèves modifient
leurs projets et observent le comportement du robot en posant les questions
suivantes :
- Pouvez-vous me montrer en utilisant vos mains jusqu'où vous pensiez que le robot Code Base se déplacerait avant d'exécuter le projet ?
- À quoi avez-vous modifié le paramètre de distance et pourquoi ? Jusqu'où pensez-vous que le robot Code Base parcourra maintenant que la distance a été modifiée ?
- Lorsque vous avez ajouté un autre bloc [Conduire pour], les avez-vous configurés pour parcourir la même distance ? Doivent-ils être identiques ? Pourquoi ou pourquoi pas ?
- Si mon robot Code Base est codé pour avancer de 100 mm, dans quelle mesure devrais-je modifier la distance si je voulais qu'il aille deux fois plus loin ?
Discutez du mouvement du robot de base du code - RappelerRappeler Les étudiants peuvent avoir des questions lorsqu'ils modifient et démarrent leur projet. Rappelez aux élèves que l’apprentissage de nouveaux concepts peut nécessiter plusieurs essais et encouragez-les à réessayer s’ils ne parviennent pas à ajouter et à modifier les blocs du projet.
- DemanderDemandez aux élèves de réfléchir à la manière dont le robot Code Base devrait se déplacer s'ils voulaient qu'il se dirige vers la porte, puis revienne à son point de départ. Quels types de tâches ou de travaux le robot Code Base pourrait-il désormais effectuer et lui permettre d'avancer et de reculer ? Demandez aux élèves de suggérer une tâche que le robot Code Base pourrait désormais accomplir en utilisant des mouvements vers l’avant et vers l’arrière.
Facultatif : Les groupes peuvent déconstruire leur robot Code Base si nécessaire à ce stade de l'expérience. Ils utiliseront la même version dans les laboratoires suivants, il s'agit donc d'une option réservée aux enseignants.