
Giocare
Parte 1 - Passo dopo passo
- IstruisciIstruisci gli studenti che esploreranno come far
progredire il loro robot Code Base! Prima di iniziare il progetto, prevedranno
dove arriverà il robot Code Base. Guarda l'animazione qui sotto per vedere
esempi del codice base che si sposta in avanti per diverse distanze.
Nell'animazione, la base del codice inizia nell'angolo inferiore sinistro del
riquadro e prima avanza di 150 mm, quindi si ferma. Quindi ritorna al punto di
partenza, avanza di 75 mm e si ferma.
File video
- ModelloModello su come avviare VEXcode GO su un dispositivo e
creare un progetto che faccia avanzare la base di codice con il blocco [Drive
for].
- Modello per gli studenti i passaggi del Apri e salva un progetto Articolo della Biblioteca VEX e averli seguire i passaggi per aprire e salvare il proprio progetto.
- Chiedere agli studenti di chiamare il loro progetto Avanti.
- Allora invita gli studenti connettere il cervello del loro codice base robot al proprio dispositivo.
- Una volta che gli studenti hanno assegnato un nome al loro progetto e collegato il Brain al loro dispositivo, devono seguire i passaggi per configurare il robot Code Base. Modella i passaggi da IL Configura una base di codice Biblioteca VEX articolo e assicurati che gli studenti possano vedere i blocchi Drivetrain nel file Cassetta degli attrezzi.
-
Mostra come trascinare il blocco [Drive for] nell'area di lavoro e posizionarlo sotto il blocco {When started}.
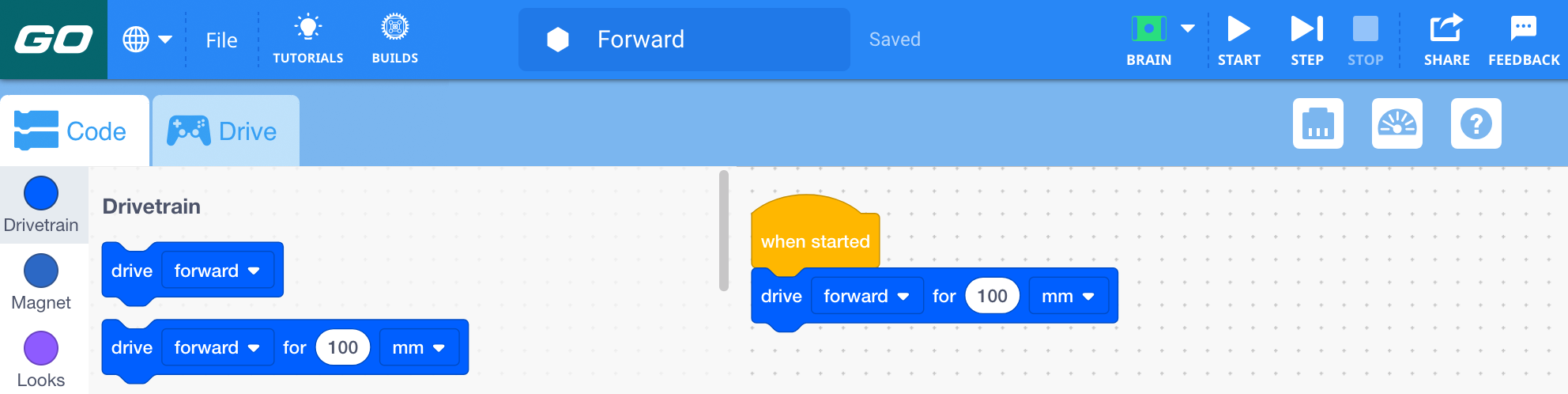
Aggiungere il blocco [Drive for] -
Modificare il parametro del blocco [Drive for] a 150 mm.
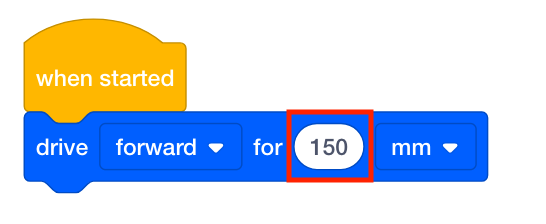
Cambia il parametro - Modello per gli studenti su come prevedere la distanza di spostamento del robot Code Base in base ai parametri nel blocco [Drive for]. Chiedete agli studenti di posizionare la base del codice nella posizione di partenza e poi di stimare la distanza di spostamento del robot. Dovrebbero posizionare un indicatore nel punto in cui pensano che la Code Base si fermerà.
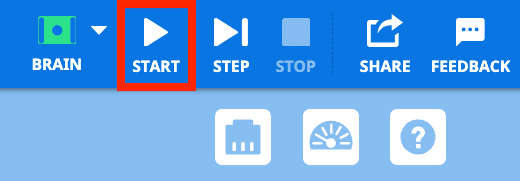
-
Fornire agli studenti un modello su come selezionare il pulsante "Avvia" sulla barra degli strumenti per avviare il progetto.
- Una volta che gli studenti hanno osservato il comportamento, mostrate loro come tornare al loro progetto e modificare i parametri del blocco [Drive for] da 150 mm a un'altra distanza, ad esempio 200 mm o 250 mm. Quindi, riavvia il progetto per vedere come la modifica dei parametri ha influenzato il movimento del robot Code Base.
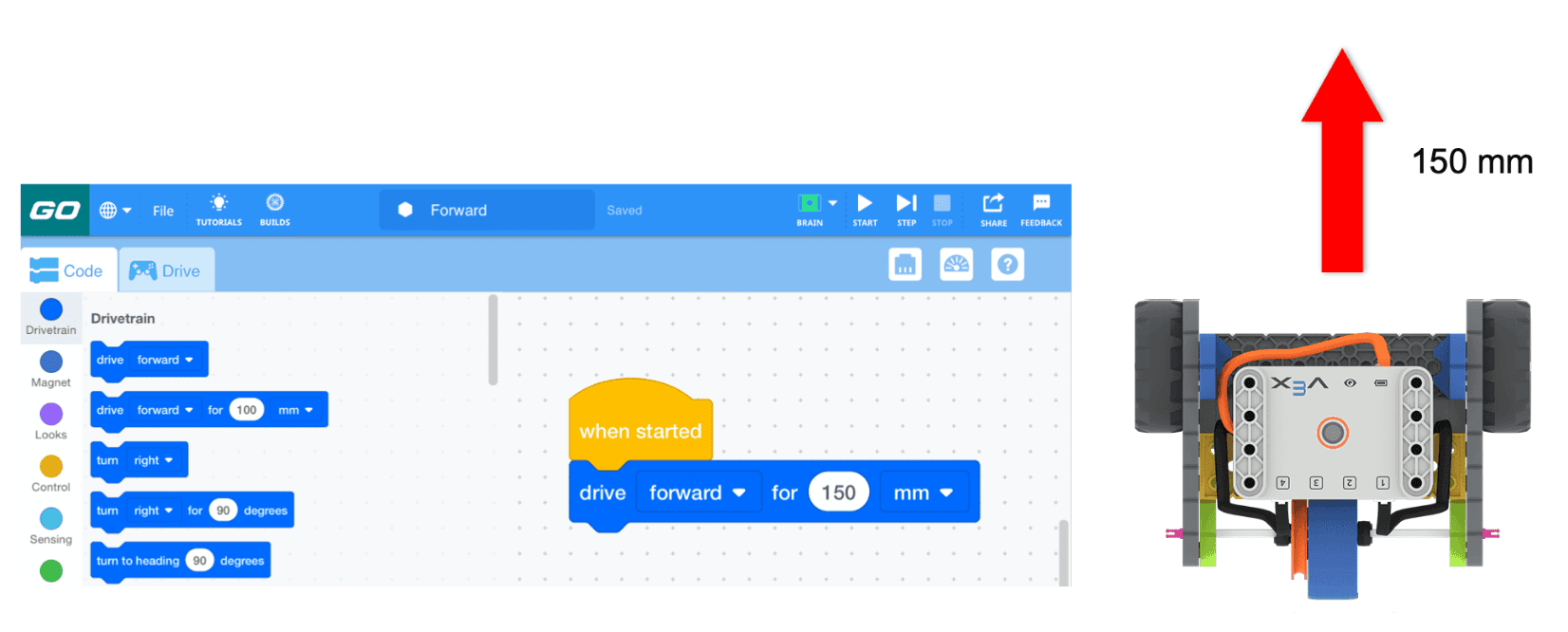
Avanti 150 mm - FacilitareFacilitare una discussione sulle osservazioni degli
studenti e sugli obiettivi del progetto ponendo le seguenti domande:
- Puoi mostrarmi, usando le mani, quanto lontano pensavi si sarebbe mosso il robot Code Base prima di iniziare il progetto?
- Come hai modificato il parametro distanza e perché? Quanto pensi che potrà percorrere il robot Code Base ora che la distanza è stata modificata?
- Quanto è stata adeguata la distanza percorsa rispetto alla tua stima?
- Quale categoria di blocchi hai utilizzato per questo progetto?

Discuti il movimento del robot di base del codice - RicordaRicorda agli studenti che potrebbero avere delle domande quando creano e iniziano il loro progetto. Ricordare agli studenti che apprendere nuovi concetti potrebbe richiedere più tentativi e incoraggiarli a riprovare se non ci riescono al primo tentativo.
- ChiediChiedi agli studenti di pensare a quanta distanza dovrebbe percorrere il robot Code Base per attraversare l'aula. Chiedi agli studenti di spiegare perché questo tipo di pianificazione è utile nella vita di tutti i giorni. Chiedere agli studenti in che modo la capacità di pianificare e dare indicazioni precise potrebbe essere utile per un lavoro? Chiedete agli studenti se gli vengono in mente lavori per i quali sono necessarie indicazioni.
Pausa a metà gioco & Discussione di gruppo
Non appena ogni gruppo ha completato il proprio progetto, riunitevi per una breve conversazione.
- Il robot Code Base è arrivato dove pensavi? In caso contrario, quanto si è avvicinato alla tua previsione?
- Come hai modificato il tuo progetto? Quale nuova distanza hai scelto?
- Hai riscontrato qualche difficoltà nel modificare la distanza nel blocco [Guida per]?
Introduzione alla trasmissione:
- Ora che abbiamo esplorato come utilizzare VEXcode GO per consentire al nostro robot Code Base di avanzare, perché pensi che ci sia una sezione di blocchi "Drivetrain"?
- Secondo te, cosa è una trasmissione? Puoi spiegare il tuo pensiero?
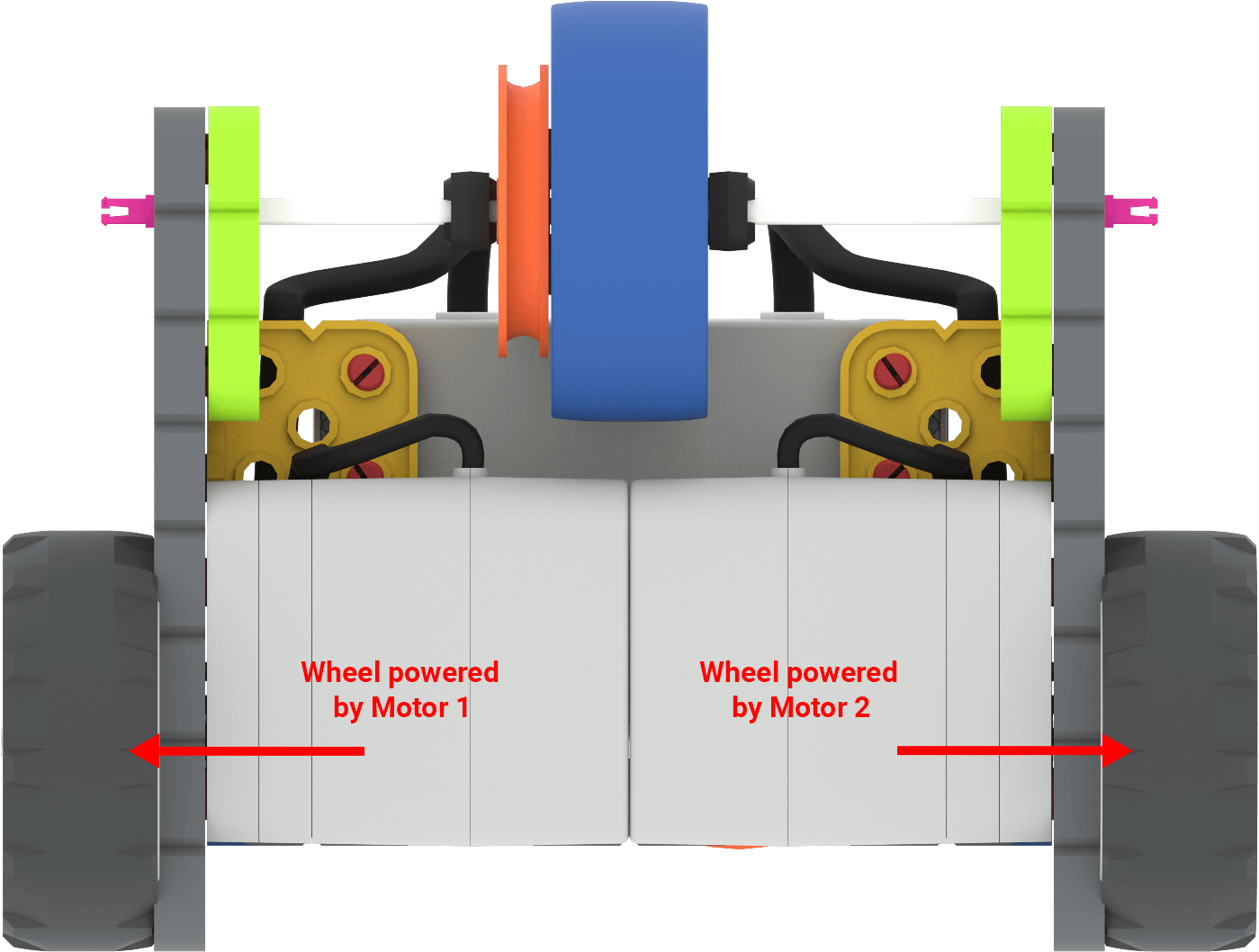
- Puoi mostrarmi tramite gesti dove pensi che si trovi la trasmissione del robot Code Base?
- Riesci a guardare la parte inferiore del tuo robot Code Base e a identificare dove si trovano i motori in questa trasmissione e a quali ruote sono collegati?
Parte 2 - Passo dopo passo
- IstruisciIstruisci gli studenti che esploreranno come muovere
il loro robot Code Base in avanti e indietro!
Per iniziare, ogni gruppo dovrebbe avere un dispositivo, VEXcode GO, almeno un marcatore di posizionamento e una base di codice creata. Guarda l'animazione qui sotto per vedere come la base di codice si muove all'indietro. Nell'animazione, il codice base inizia nell'angolo in alto a sinistra del riquadro e procede in retromarcia per 150 mm, quindi si ferma. Quindi ritorna nella posizione di partenza e procede in retromarcia per 75 mm.
File video - ModelloModello per studenti su come avviare VEXcode GO su un
dispositivo e rinominare il loro progetto come Reverse. Mostra agli studenti
di selezionare "Salva con nome" per salvare questo progetto separatamente dal
primo.
Fare riferimento ai passaggi in Apri e salva a Progetto articolo per ulteriori informazioni.
-
Modella come modificare il parametro sul blocco [Drive for] per far sì che la base di codice esegua l'operazione inversa.
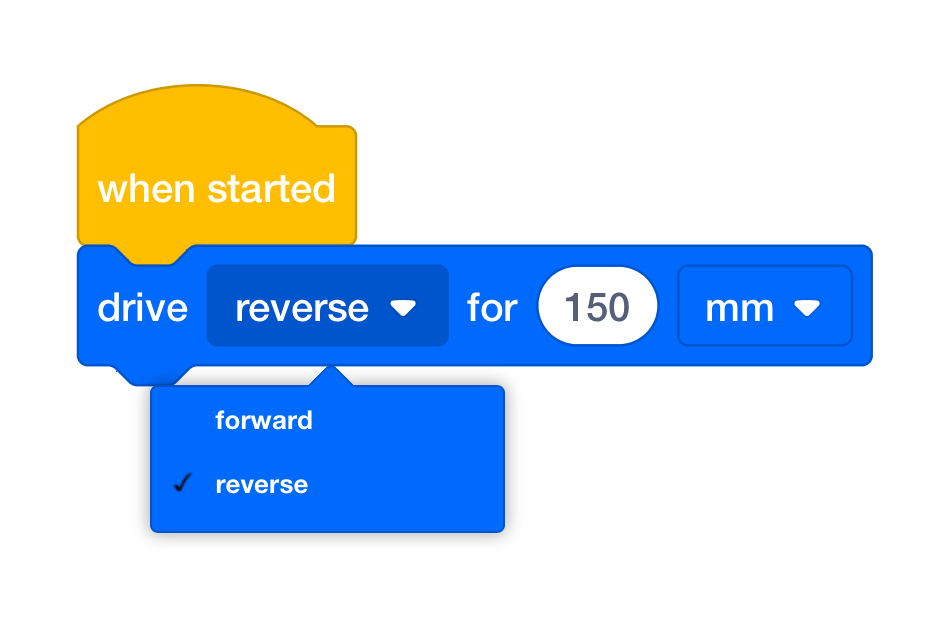
Cambia il parametro (inverso) - Utilizzare lo stesso processo di stima utilizzato nella Parte 1 del Gioco. Chiedete agli studenti di posizionare la base del codice nella posizione di partenza e poi di stimare la distanza di spostamento del robot. Dovrebbero posizionare un indicatore nel punto in cui pensano che la Code Base si fermerà.
-
Fate iniziare i progetti agli studenti. Potrebbe essere necessario ricordarlo loro dei passaggi per Collega un cervello VEX GO Se si verificano problemi di connessione.
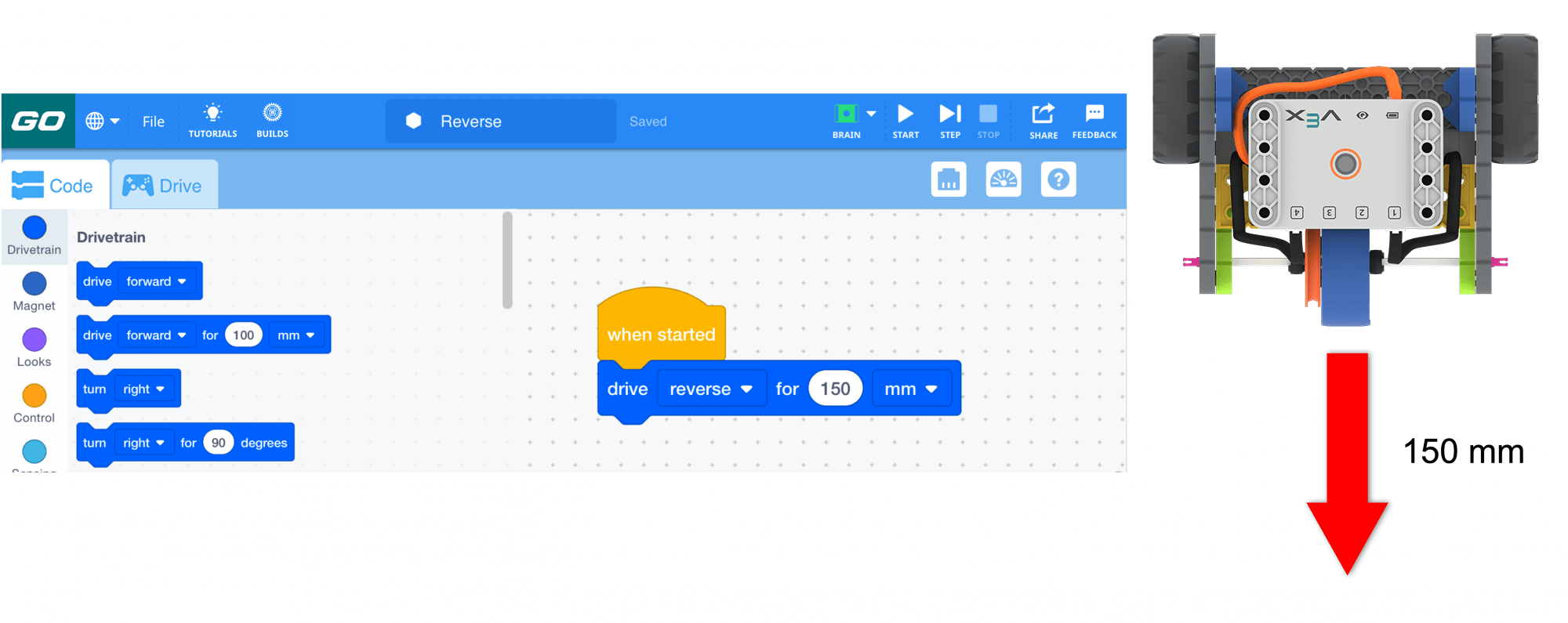
Invertire 150mm - Una volta che gli studenti hanno osservato il comportamento durante la guida in retromarcia, mostrate loro come tornare al loro progetto. Dovrebbero quindi rinominare il loro progettoAvanti eIndietro. Refer to the steps in the Open and Save Articolo della libreria VEX per ulteriori informazioni.
-
Modello per gli studenti su come aggiungere un secondo blocco [Guida per]. Un blocco [Drive for] dovrebbe far procedere il robot in avanti, mentre il secondo dovrebbe far procedere il robot in retromarcia. Modella come modificare i parametri dei blocchi [Drive for], quindi riavvia il progetto per vedere come la modifica dei parametri ha influenzato il movimento del robot Code Base.
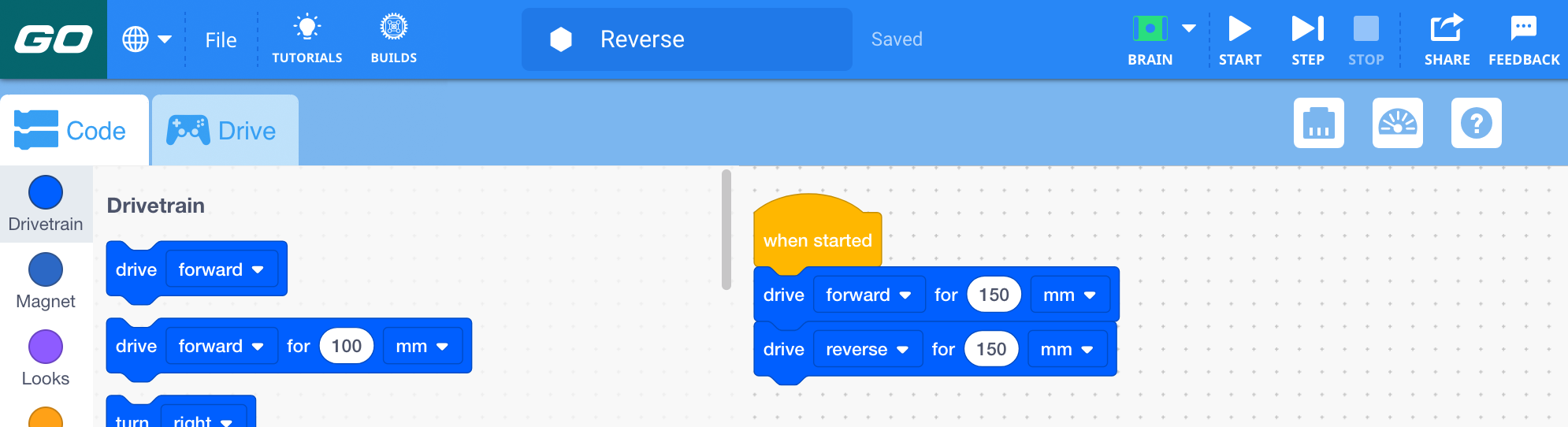
Avanti e indietro
-
- FacilitareFacilitare una discussione mentre gli studenti
modificano i loro progetti e osservano il comportamento del robot ponendo le
seguenti domande:
- Puoi mostrarmi con le mani quanto lontano pensavi si sarebbe mosso il robot Code Base prima di avviare il progetto?
- Come hai modificato il parametro distanza e perché? Quanto pensi che potrà percorrere il robot Code Base ora che la distanza è stata modificata?
- Quando hai aggiunto un altro blocco [Guida per], hai impostato i blocchi in modo che percorressero la stessa distanza? Devono essere uguali? Perché sì o perché no?
- Se il mio robot Code Base è programmato per avanzare di 100 mm, quanto dovrei modificare la distanza se volessi raddoppiare la distanza?
Discuti il movimento del robot di base del codice - RicordaRicorda che gli studenti potrebbero avere delle domande quando modificano e iniziano il loro progetto. Ricorda agli studenti che apprendere nuovi concetti potrebbe richiedere più tentativi e incoraggiali a riprovare se non riescono ad aggiungere e modificare i blocchi nel progetto.
- ChiediChiedi agli studenti di pensare a come dovrebbe muoversi il robot Code Base se volessero che si dirigesse verso la porta e poi tornasse al punto di partenza. Quali tipi di compiti o lavori potrebbe ora svolgere il robot Code Base, che riesce a muoversi avanti e indietro? Chiedere agli studenti di suggerire un compito che il robot Code Base potrebbe ora completare utilizzando movimenti in avanti e indietro.
Facoltativo: Se necessario, a questo punto dell'esperienza i gruppi possono decostruire il loro robot Code Base. Nei laboratori successivi utilizzeranno la stessa build, quindi questa è un'opzione che spetta agli insegnanti.