
Hrát
Část 1 – Krok za krokem
- InstrukceInstruujte studenty, že prozkoumají, jak posunout svého robota z Code Base vpřed! Než začnou s projektem, předpoví, kde se robot Code Base nakonec ocitne. Podívejte se na animaci níže a uvidíte příklady postupu kódové základny pro různé vzdálenosti. V animaci začíná kódová báze v levém dolním rohu dlaždice, nejprve se posune o 150 mm vpřed a zastaví se. Poté se objeví zpět na výchozím místě, posune se vpřed o 75 mm a zastaví se.
Videosoubor
- ModelUkažte, jak spustit VEXcode GO na zařízení a vytvořit projekt, který posune kódovou základnu vpřed pomocí bloku [Drive for].
- Předveďte studentům kroky z článku Otevření a uložení projektuKnihovna VEX a nechte je postupovat podle kroků k otevření a uložení projektu.
- Požádejte studenty, aby svůj projekt pojmenovali Vpřed.
- Nechte studenty poté připojit mozek svého robota s kódovou základnou k jejich zařízení.
- Jakmile studenti pojmenují svůj projekt a připojí Brain ke svému zařízení, musí postupovat podle kroků pro konfiguraci robota Code Base. Vymodelujte kroky z článku Konfigurace knihovny VEX pro kódovou základnu a ujistěte se, že studenti vidí bloky Drivetrain v sadě nástrojů.
-
Ukažte, jak přetáhnout blok [Drive for] do pracovního prostoru a umístit ho pod blok {When started}.
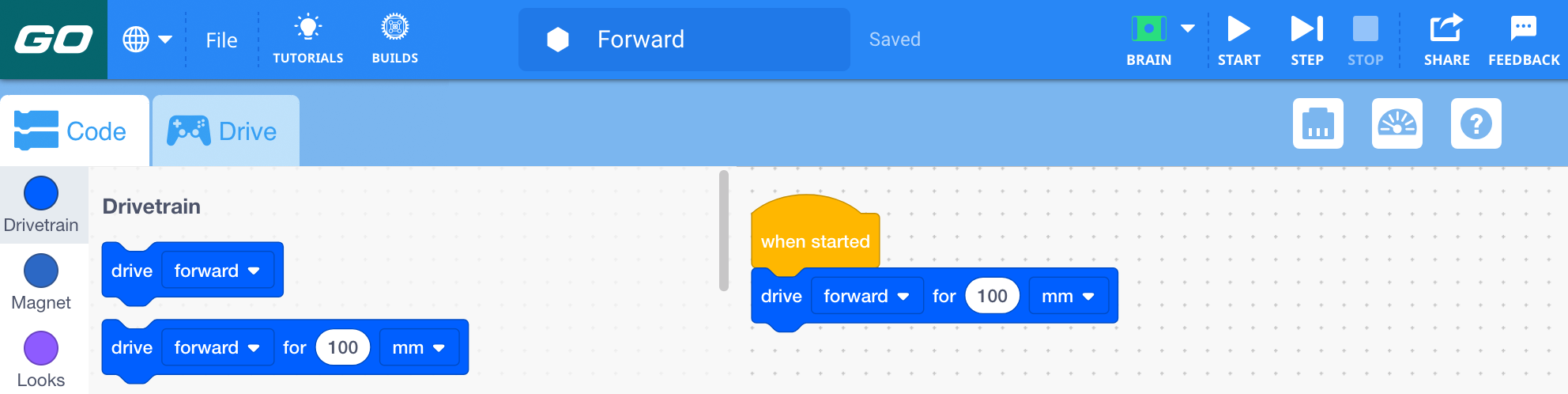
Přidejte blok [Drive for] -
Změňte parametr bloku [Drive for] na 150 mm.
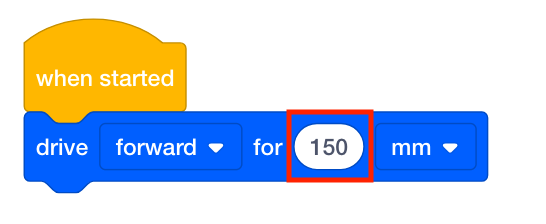
Změňte parametr - Ukažte studentům, jak předpovědět, jak daleko se robot s kódem posune na základě parametrů v bloku [Drive for]. Nechte studenty umístit kódovou základnu do výchozí polohy a poté odhadněte, jak daleko se robot posune. Měli by umístit značku tam, kde si myslí, že kódová základna skončí.
-
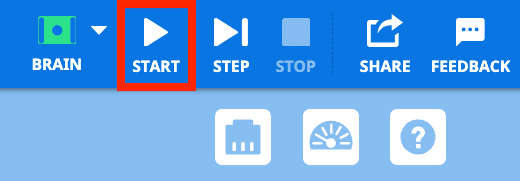
Ukažte studentům, jak spustit projekt stisknutím tlačítka „Start“ na panelu nástrojů.
- Jakmile studenti pozorují chování, ukažte jim, jak se vrátit k projektu a upravit parametry bloku [Drive for] ze 150 mm na jinou vzdálenost, například 200 mm nebo 250 mm. Poté projekt znovu spusťte a podívejte se, jak změna parametrů ovlivnila pohyb robota Code Base.
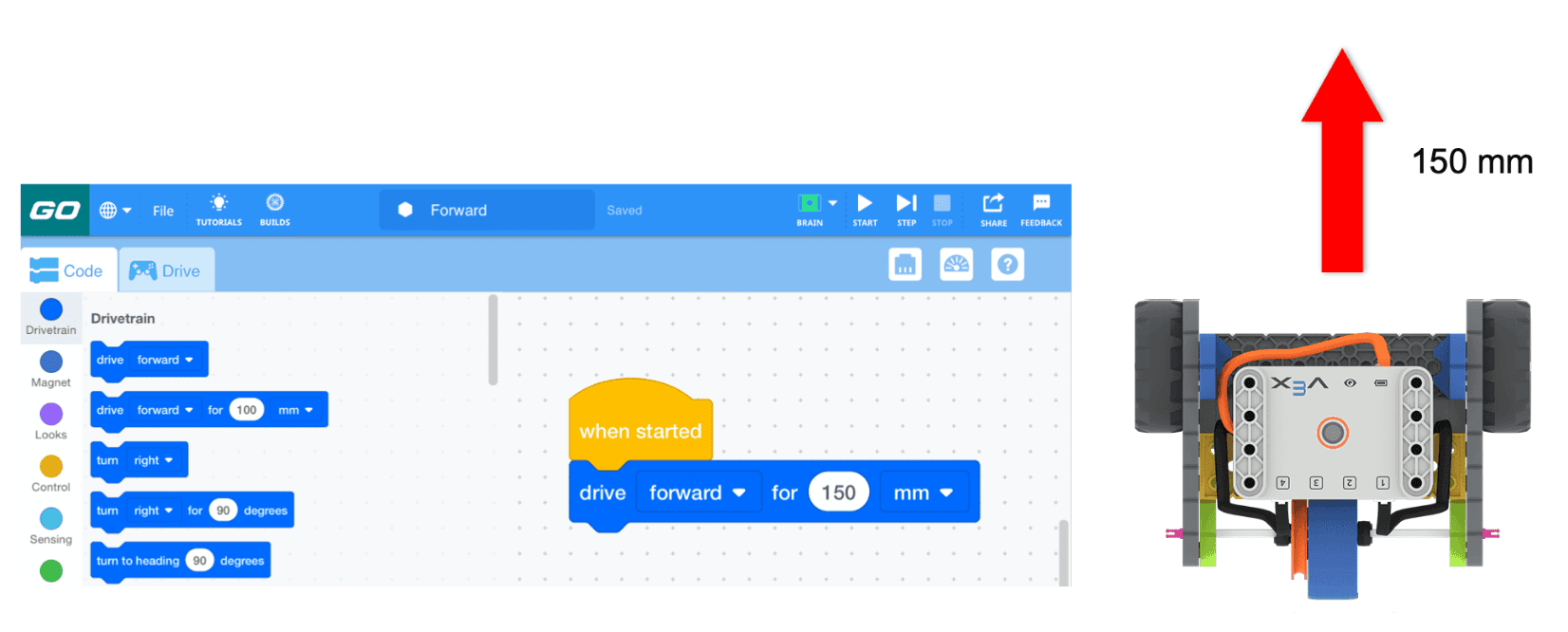
Vpřed 150 mm - FacilitovatFacilitovat diskusi o studentských pozorováních a cílech projektu položením následujících otázek:
- Můžete mi rukama ukázat, jak daleko jste si mysleli, že se robot z Code Base posune, než jste projekt začali?
- Na co jste změnili parametr vzdálenosti a proč? Jak daleko si myslíte, že robot z Code Base dojede, když se vzdálenost změnila?
- Jak se ujetá vzdálenost srovnávala s vaším odhadem?
- Jakou kategorii bloků jste pro tento projekt použili?

Diskutujte o pohybu robota v kódové základně - PřipomeňtePřipomeňte studentům, že mohou mít otázky při tvorbě a zahájení svého projektu. Připomeňte studentům, že učení se novým konceptům může vyžadovat několik pokusů, a povzbuďte je, aby to zkusili znovu, pokud se jim napoprvé nepodaří.
- Ptám sePožádejte studenty, aby se zamysleli nad tím, jak daleko by se robot z Code Base musel pohybovat napříč učebnou. Nechte studenty propojit, proč je tento typ plánování užitečný v každodenním životě. Zeptejte se studentů, jak by jim mohla být schopnost plánovat a dávat přesné pokyny užitečná v práci? Zeptejte se studentů, zda si dokážou představit nějakou práci, kde je potřeba pokyny.
Přestávka uprostřed hry & Skupinová diskuse
Jakmile každá skupina dokončí svůj projekt, sejděte se k krátké diskusi.
- Skončil robot z Code Base tam, kam jste si mysleli? Pokud ne, jak blízko to bylo vaší předpovědi?
- Jak jste upravovali svůj projekt? Jakou novou vzdálenost jste si zvolili?
- Měli jste nějaké potíže se změnou vzdálenosti v bloku [Jeďte pro]?
Představte si hnací ústrojí:
- Nyní, když jsme prozkoumali, jak pomocí VEXcode GO umožnit našemu robotovi s kódovou základnou jet vpřed, proč si myslíte, že existuje sekce bloků „Pohon“?
- Co si myslíte, že je to hnací ústrojí? Můžete vysvětlit svou myšlenku?
- Můžete mi pomocí gest ukázat, kde si myslíte, že se na robotu z Code Base nachází hnací ústrojí?
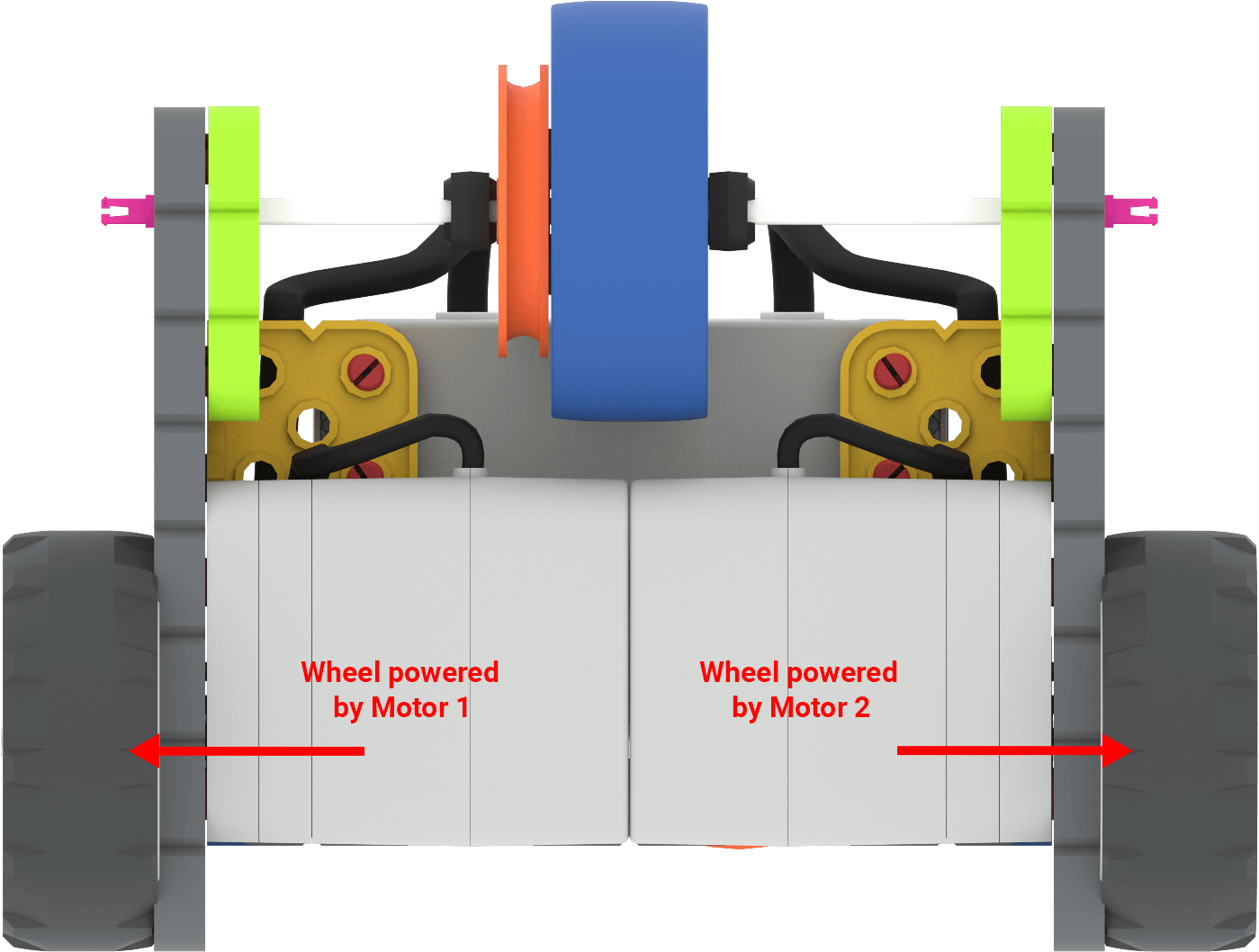
- Můžete se podívat na spodní část vašeho robota s kódovou základnou a zjistit, kde se v tomto pohonu nacházejí motory a ke kterým kolům jsou připojeny?
Část 2 – Krok za krokem
- InstrukceInstruujte studenty, že prozkoumají, jak pohybovat svým robotem z Code Base vpřed a vzad!
Pro začátek by každá skupina měla mít zařízení VEXcode GO, alespoň jeden umisťovací marker a vytvořenou kódovou bázi. Podívejte se na animaci níže a uvidíte, jak se kódová báze pohybuje v opačném směru. V animaci začíná kódová báze v levém horním rohu dlaždice, posouvá se v opačném směru o 150 mm a poté se zastaví. Poté se vrátí do výchozí polohy a posune se dozadu o 75 mm.
Videosoubor - ModelModel pro studenty, jak spustit VEXcode GO na zařízení a přejmenovat svůj projekt na Reverse. Ukažte studentům, aby si vybrali možnost „Uložit jako“, aby si tento projekt uložili odděleně od svého prvního.
Další informace naleznete v článku Otevření a uložení projektu.
-
Ukažte, jak změnit parametr v bloku [Drive for], aby se kódová základna otáčela v opačném směru.
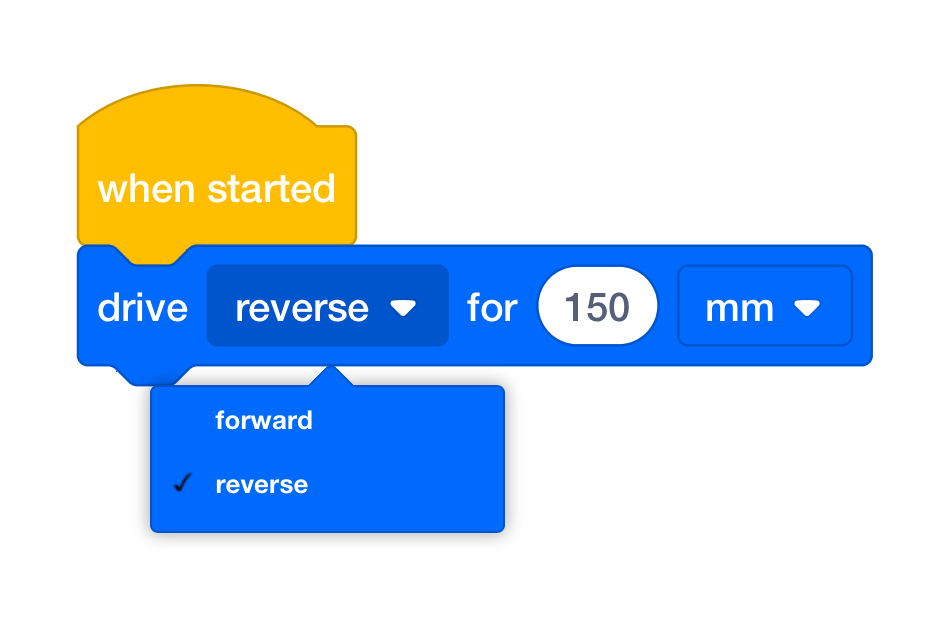
Změna parametru (obráceně) - Použijte stejný proces odhadování jako v části Play 1. Nechte studenty umístit kódovou základnu do výchozí polohy a poté odhadněte, jak daleko se robot posune. Měli by umístit značku tam, kde si myslí, že kódová základna skončí.
-
Nechte studenty začít s vlastními projekty. Pokud se vyskytnou problémy s připojením, možná jim budete muset připomenout kroky pro připojení zařízení VEX GO Brain.
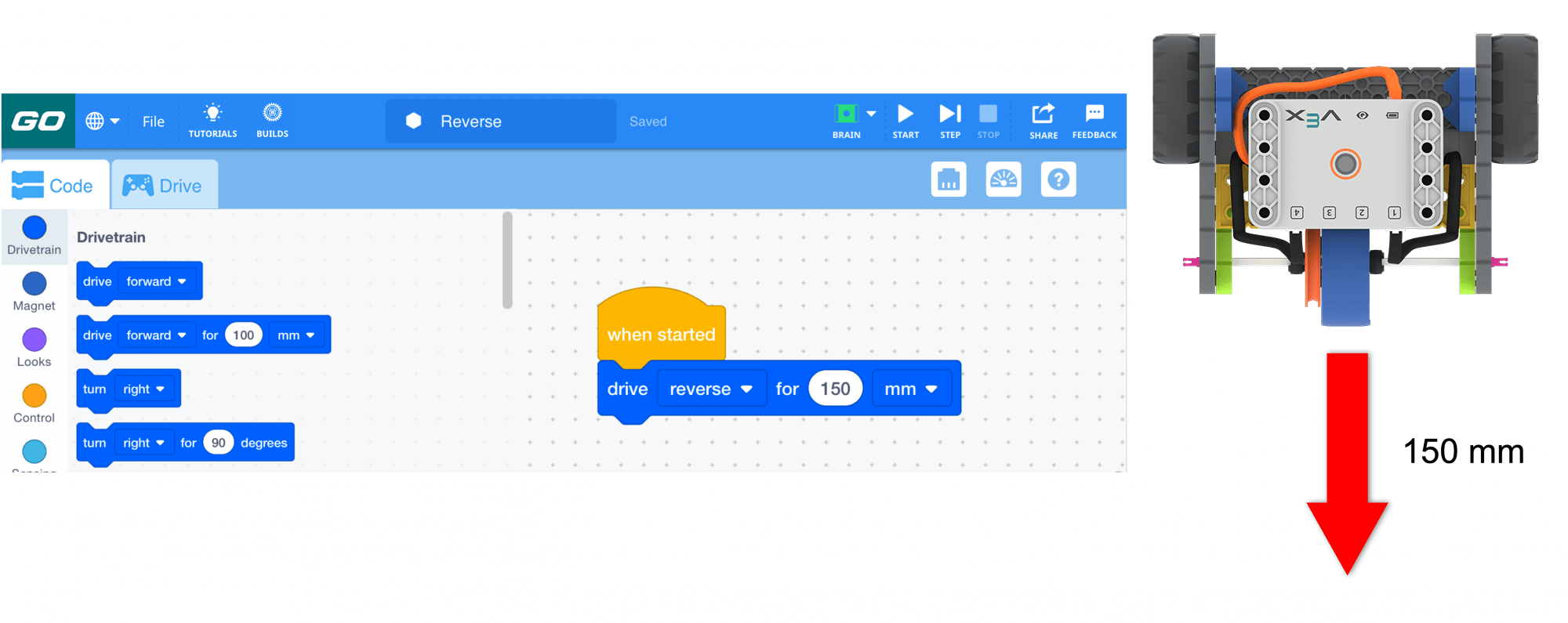
Zpětný chod 150 mm - Jakmile studenti pozorují chování při couvání, ukažte jim, jak se mají vrátit ke svému projektu. Pak by měli svůj projektpřejmenovat na Forward and Reverse. Další informace naleznete v článku Otevření a uloženíknihovny VEX.
-
Ukázka pro studenty, jak přidat druhý blok [Drive for]. Jeden blok [Jet pro] by měl robota uvést do pohybu vpřed a druhý by měl robota uvést do pohybu vzad. Ukažte, jak upravit parametry bloků [Drive for], a poté znovu spusťte projekt, abyste viděli, jak změna parametrů ovlivnila pohyb robota Code Base.
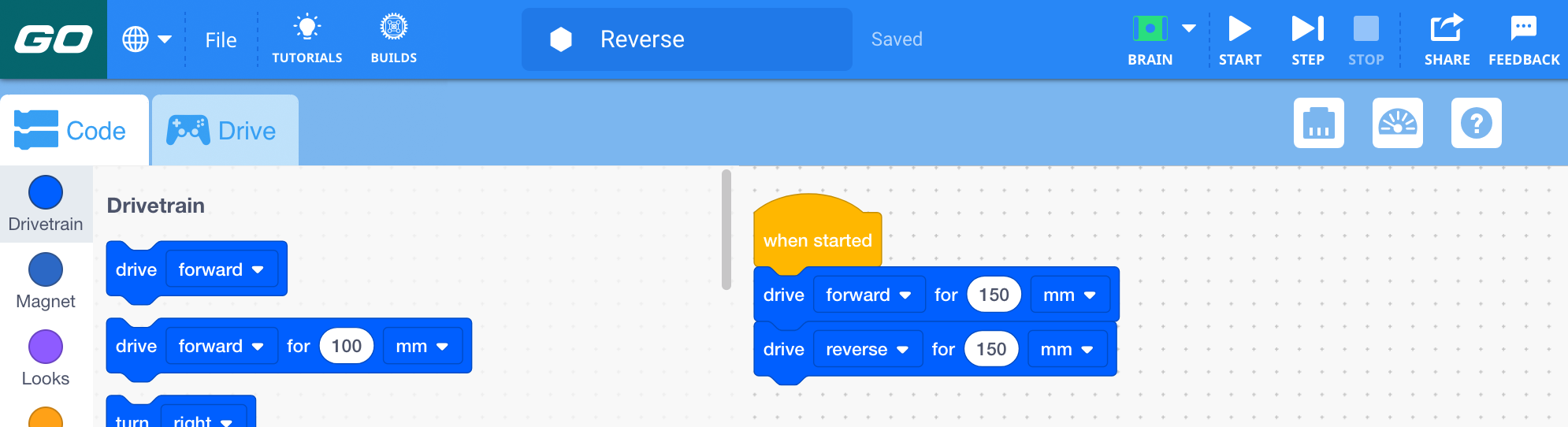
Vpřed a vzad
-
- FacilitovatFacilitovat diskusi, zatímco studenti upravují své projekty a pozorují chování robota, položením následujících otázek:
- Můžete mi rukama ukázat, jak daleko jste si mysleli, že se robot z Code Base posune, než jste projekt spustili?
- Na co jste změnili parametr vzdálenosti a proč? Jak daleko si myslíte, že robot z Code Base dojede, když se vzdálenost změnila?
- Když jste přidali další blok [Jeďte pro], nastavili jste je tak, aby urazily stejnou vzdálenost? Musí být stejné? Proč ano nebo proč ne?
- Pokud je můj robot v kódové základně naprogramován tak, aby se pohyboval vpřed o 100 mm, o kolik bych musel tuto vzdálenost změnit, kdybych chtěl, aby se pohyboval dvakrát tak daleko?
Diskutujte o pohybu robota v kódové základně - PřipomínkaPřipomeňte studentům, že mohou mít otázky při úpravách a zahájení projektu. Připomeňte studentům, že učení se novým konceptům může vyžadovat několik pokusů, a povzbuďte je, aby to zkusili znovu, pokud se jim nedaří přidávat a upravovat bloky v projektu.
- Ptám sePožádejte studenty, aby se zamysleli nad tím, jak by se musel pohybovat robot z Code Base, pokud by chtěli, aby dojel ke dveřím a pak se vrátil na výchozí bod. Jaké typy úkolů nebo prací by nyní mohl robot s kódovou základnou vykonávat, aby se mohl pohybovat vpřed a vzad? Požádejte studenty, aby navrhli úkol, který by robot z Code Base nyní mohl splnit pomocí pohybů vpřed a vzad.
Volitelné: Skupiny mohou v této fázi experimentu v případě potřeby rozebrat svého robota z kódové základny. V následujících cvičeních budou používat stejnou sestavu, takže se jedná o možnost pro učitele.