
Brincadeira
Parte 1 - Passo a Passo
- InstruaInstrua os alunos que irão explorar como mover o seu robô Code Base
para a frente! Antes de iniciarem o projeto, irão prever onde irá parar o robô Code Base.
Veja a animação abaixo para ver exemplos de código base a avançar em diferentes distâncias.
Na animação, o Code Base começa no canto inferior esquerdo do Tile e primeiro avança 150 mm
e pára. Em seguida, aparece de volta ao local inicial, avança 75 mm e pára.
Arquivo de vídeo
- ModeloModele como iniciar o VEXcode GO num dispositivo e criar um projeto
que mova o Code Base para a frente com o bloco [Drive for].
- Modele para os alunos as etapas do Aberto e guardar um projeto Artigo da Biblioteca VEX e peça-lhes que sigam os passos para abrir e guardar o projeto.
- Instrua os alunos a nomearem o seu projeto Seguinte.
- Peça aos alunos, então, Ligue o cérebro do robô Code Base para o dispositivo
- Assim que os alunos nomearem o seu projeto e ligarem o Brain ao dispositivo, terão de seguir os passos de configuração do robô Code Base. Modele as etapas do Configurar uma base de código Artigo da Biblioteca VEX e garanta os alunos podem ver os blocos Drivetrain na caixa de ferramentas.
-
Mostre como arrastar o bloco [Drive for] para o ambiente de trabalho e colocá-lo sob o bloco {When started}.
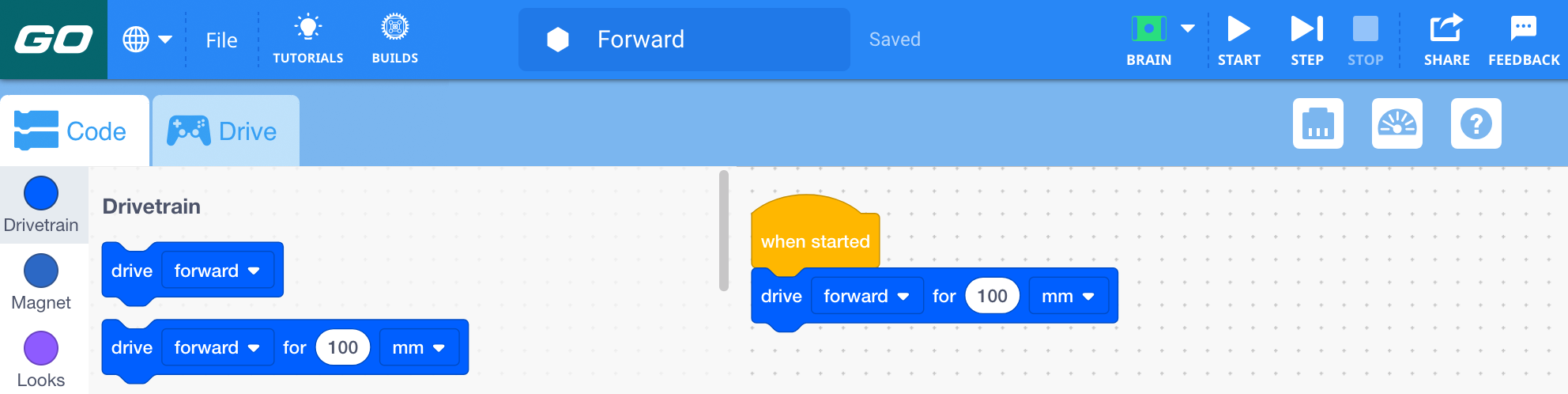
Adicione o bloco [Drive for] -
Altere o parâmetro do bloco [Drive for] para 150mm.
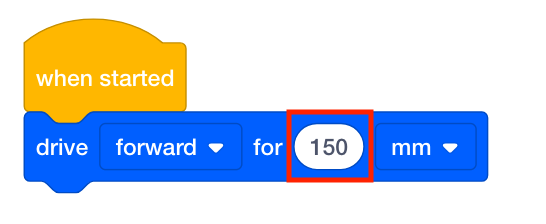
Altere o parâmetro - Modele para os alunos como prever a distância que o robô Code Base se irá deslocar com base nos parâmetros do bloco [Drive for]. Peça aos alunos que coloquem a Base de Código na posição inicial e, em seguida, estimem a distância que o robô se vai deslocar. Devem colocar um marcador onde acham que a Base de Código irá parar.
-
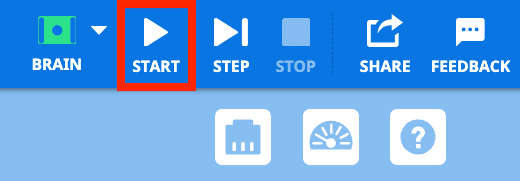
Modelo para os alunos como selecionar o botão ‘Iniciar’ na barra de ferramentas para iniciar o projeto.
- Depois de os alunos observarem o comportamento, modele para os alunos como voltar ao projeto, edite os parâmetros do bloco [Drive for] de 150 mm para outra distância, como 200 mm ou 250 mm. Em seguida, reinicie o projeto para ver como a alteração dos parâmetros afetou o movimento do robô Code Base.
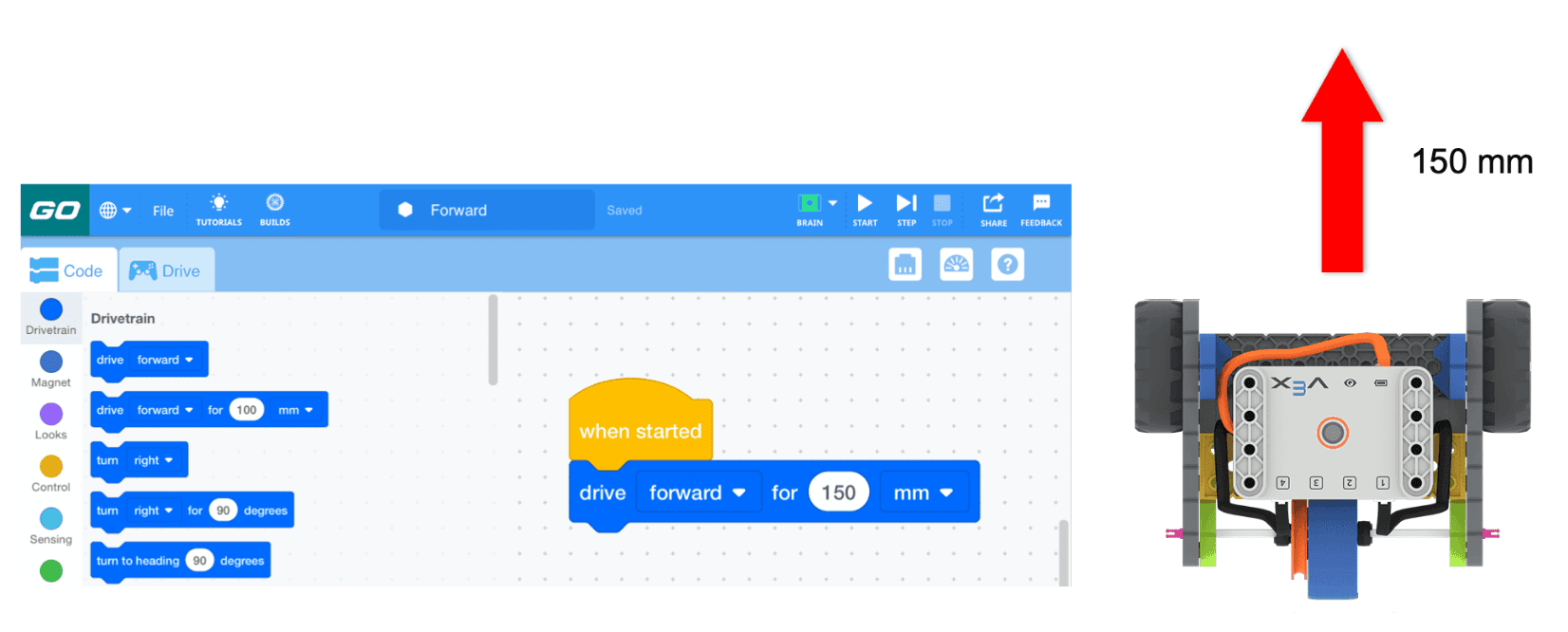
Avançar 150 mm - FacilitarFacilite uma discussão sobre as observações dos alunos e os
objetivos do projeto, perguntando o seguinte:
- Pode mostrar-me com as mãos até onde pensava que o robô Code Base se iria mover antes de iniciar o projeto?
- Para que alterou o parâmetro distância e porquê? Quão longe pensa que o robô Code Base irá viajar agora que a distância foi alterada?
- Como é que a distância percorrida se compara com a sua estimativa?
- Que categoria de blocos utilizou para este projeto?

Discuta o movimento do robô base de código - LembrarLembre os alunos que podem ter dúvidas ao criar e iniciar o seu projeto. Lembre os alunos que aprender novos conceitos pode exigir várias tentativas e incentive-os a tentar novamente se não tiverem sucesso na primeira tentativa.
- PerguntaPeça aos alunos para pensarem na distância que o robô Code Base necessitaria de percorrer para percorrer a sala de aula. Peça aos alunos que expliquem porque é que este tipo de planeamento é útil na vida quotidiana. Pergunte aos alunos como é que a capacidade de planear e fornecer instruções precisas pode ser útil para um trabalho. Pergunte aos alunos se conseguem pensar em algum trabalho onde sejam necessárias orientações.
Discussão em grupo no intervalo & do jogo
Assim que cada grupo tiver concluído o seu projeto, reúna-se para uma breve conversa .
- O robô Code Base acabou onde pensava que ia? Se não, quão próximo estava da sua previsão?
- Como editou o seu projeto? Que nova distância escolheu?
- Encontrou alguma dificuldade ao alterar a distância no bloco [Drive for]?
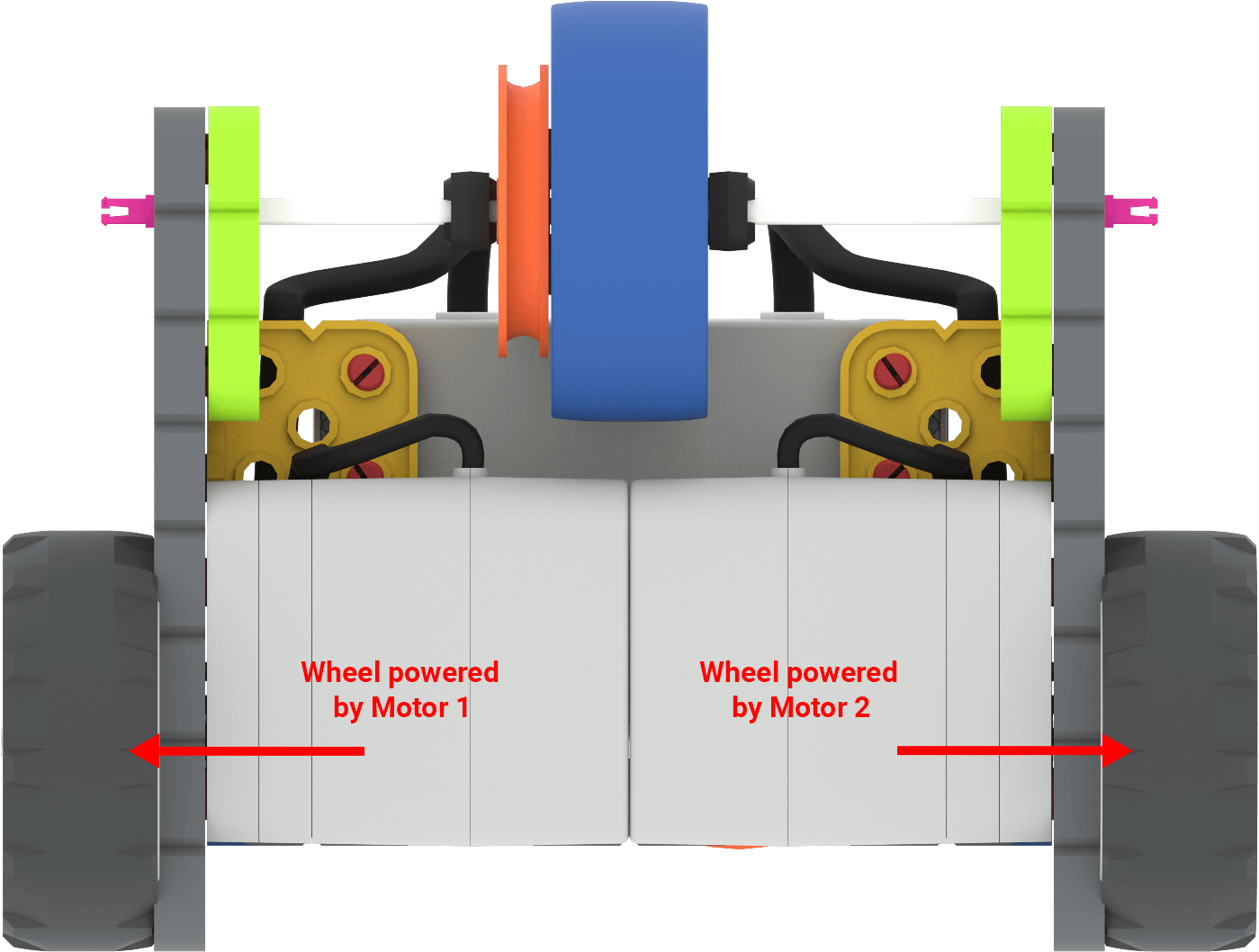
Apresente o grupo motopropulsor:
- Agora que já explorámos como utilizar o VEXcode GO para permitir que o nosso robô Code Base avance, porque acha que existe uma secção de blocos “Drivetrain”?
- O que acha que é um sistema de transmissão? Pode explicar o seu pensamento?
- Pode mostrar-me, usando gestos, onde acha que está o sistema de transmissão no robô Code Base?
- Consegue olhar para a parte inferior do seu robô Code Base e identificar onde estão os motores neste sistema de transmissão e a que rodas estão ligados?
Parte 2 - Passo a Passo
- InstruaInstrua os alunos que irão explorar como mover o seu robô Code Base
para a frente e para trás!
Para começar, cada grupo deve ter um dispositivo, VEXcode GO, pelo menos um marcador de posicionamento e uma Base de Código construída. Vê a animação abaixo para veres como o Code Base se move ao contrário. Na animação, o Code Base começa no canto superior esquerdo do bloco, anda 150 mm para trás e depois pára. Em seguida, regressa à posição inicial e faz marcha-atrás durante 75 mm.
Arquivo de vídeo - ModeloModelo para os alunos como iniciar o VEXcode GO num dispositivo e
renomear o seu projeto como Reverse. Peça aos alunos para selecionarem 'Guardar como' para
guardar este projeto separadamente do primeiro.
Consulte os passos no Abra e guarde um Projeto artigo para mais informações.
-
Modele como alterar o parâmetro no bloco [Drive for] para que o Code Base seja direcionado ao contrário.
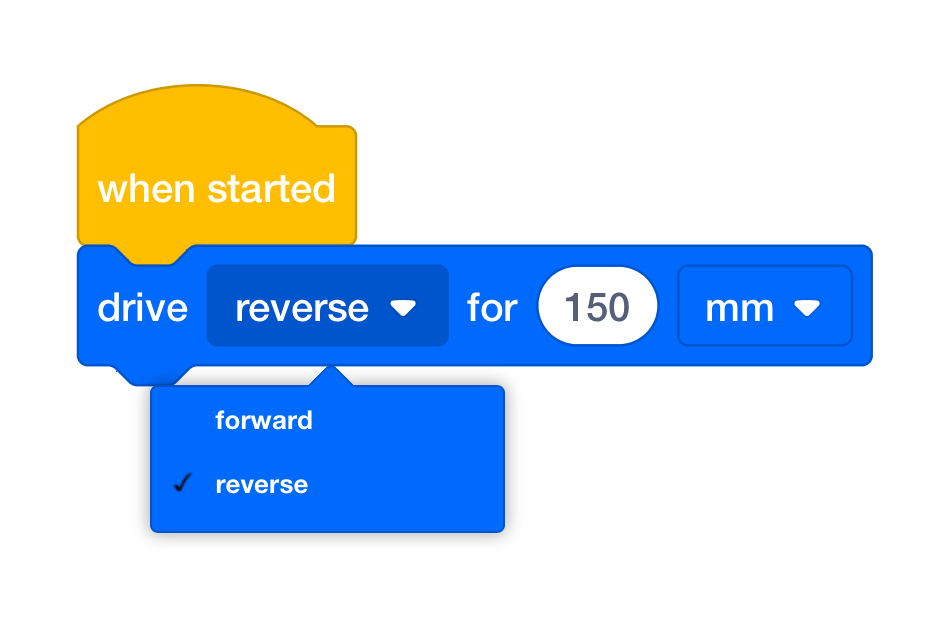
Altere o parâmetro (reverso) - Utilize o mesmo processo de estimativa da Parte 1. Peça aos alunos que coloquem a Base de Código na posição inicial e, em seguida, estimem a distância que o robô se vai deslocar. Devem colocar um marcador onde acham que a Base de Código irá parar.
-
Peça aos alunos que iniciem os seus projetos. Pode precisar de lembrá-los do passos para Ligue um cérebro VEX GO se ocorrerem problemas de ligação.
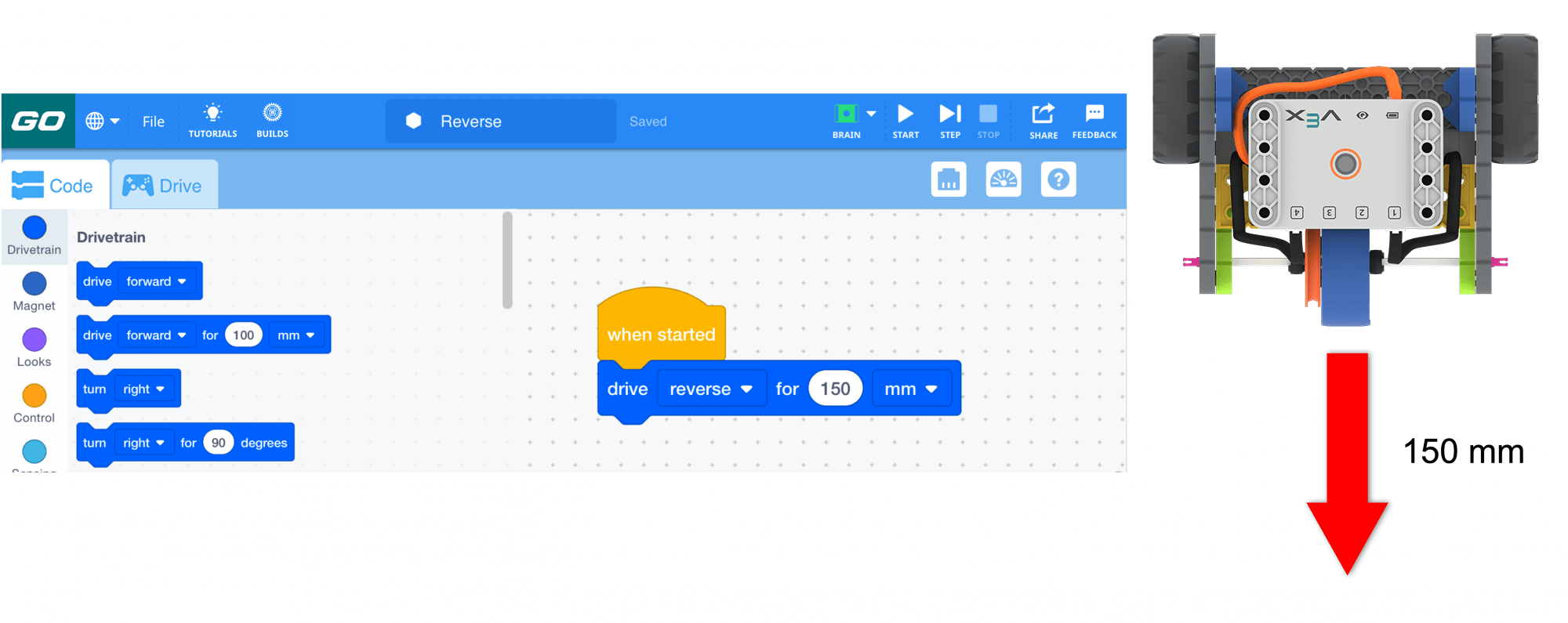
Reverso 150mm - Depois de os alunos observarem o comportamento de condução em marcha-atrás, mostre aos alunos como voltar ao projeto. Devem então renomear o seu projetoForward e Reverse. Consulte os passos no Abrir e guardar Artigo da Biblioteca VEX para mais informações.
-
Modelo para os alunos como adicionar um segundo bloco [Drive for]. Um bloco [Drive for] deve fazer com que o robô se mova para a frente e o segundo deve fazer com que o robô se mova para trás. Modele como editar os parâmetros dos blocos [Drive for] e, em seguida, inicie o projeto novamente para ver como a alteração dos parâmetros afetou o movimento do robô Code Base.
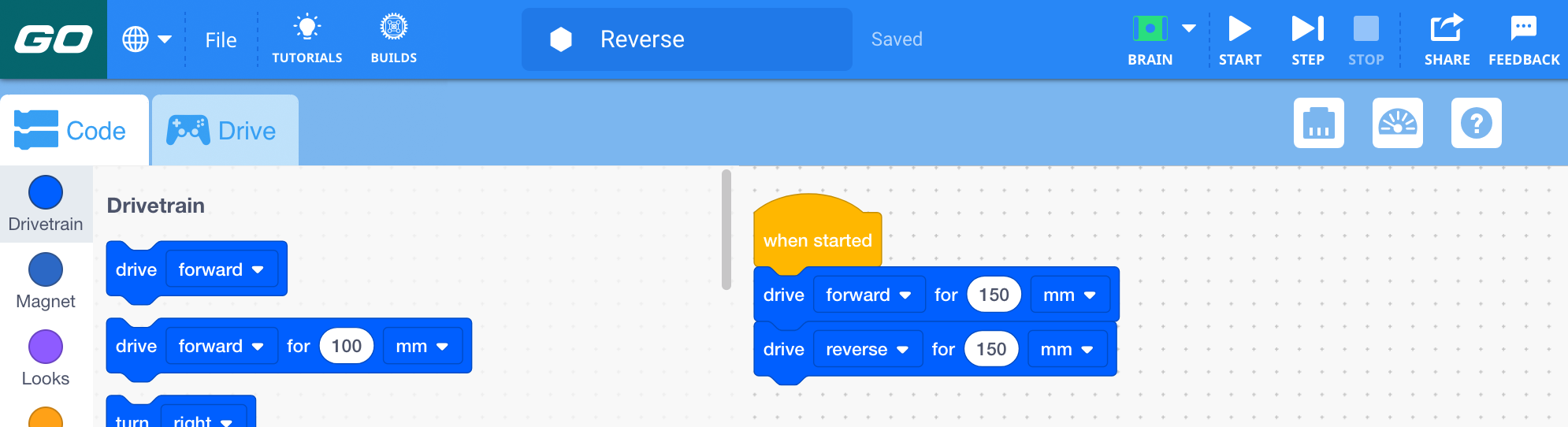
Avançar e Reverter
-
- FacilitarFacilite uma discussão enquanto os alunos editam os seus projetos
e observam o comportamento do robô, perguntando o seguinte:
- Pode mostrar-me com as mãos até onde pensava que o robô Code Base se iria mover antes de executar o projeto?
- Para que alterou o parâmetro distância e porquê? Quão longe pensa que o robô Code Base irá viajar agora que a distância foi alterada?
- Quando adicionou outro bloco [Drive for], configurou-os para percorrer a mesma distância? Têm que ser iguais? Porquê ou por que não?
- Se o meu robô Code Base estiver codificado para avançar 100 mm, até que ponto precisaria de alterar a distância se quisesse que avançasse duas vezes mais?
Discuta o movimento do robô base de código - LembrarLembrar que os alunos podem ter dúvidas quando estão a editar e a iniciar o projeto. Lembre os alunos que a aprendizagem de novos conceitos pode exigir várias tentativas e incentive-os a tentar novamente se não conseguirem adicionar e editar os blocos no projeto.
- PerguntaPeça aos alunos para pensarem sobre como o robô Code Base precisaria de se mover, se quisessem que ele fosse até à porta e depois voltasse para onde começou. Que tipos de tarefas ou trabalhos poderia o robô Code Base executar agora para avançar e recuar? Peça aos alunos que sugiram uma tarefa que o robô Code Base poderia agora completar utilizando movimentos para a frente e para trás.
Opcional: Os grupos podem desconstruir o seu robô Code Base se necessário neste momento da experiência. Utilizarão a mesma versão nos laboratórios seguintes, pelo que esta é uma opção do professor.