
Toneelstuk
Deel 1 - Stap voor stap
- InstructieGeef de leerlingen de opdracht om te onderzoeken hoe ze hun Code Base-robot vooruit kunnen helpen! Voordat ze aan het project beginnen, voorspellen ze waar de Code Base-robot uiteindelijk terechtkomt. Bekijk de onderstaande animatie om voorbeelden te zien van de Code Base die over verschillende afstanden beweegt. In de animatie begint de Code Base in de linker benedenhoek van de Tile en beweegt eerst 150 mm naar voren om vervolgens te stoppen. Vervolgens keert het terug naar de startpositie, rijdt 75 mm vooruit en stopt.
Videobestand
- ModelModel hoe VEXcode GO op een apparaat wordt gestart en hoe een project wordt gemaakt dat de codebasis vooruit beweegt met het blok [Drive for].
- Laat de leerlingen de stappen van het Een project openen en opslaanVEX-bibliotheek zien en laat ze de stappen volgen om hun project te openen en op te slaan.
- Geef de leerlingen de opdracht hun project de naam Vooruitte geven.
- Laat de leerlingen de Brain van hun Code Base-robot aansluiten op hun apparaat.
- Nadat leerlingen hun project een naam hebben gegeven en Brain op hun apparaat hebben aangesloten, moeten ze de stappen volgen om de Code Base-robot te configureren. Modelleer de stappen uit het artikel Configure a Code Base VEX Library en zorg ervoor dat studenten de Drivetrain-blokken in de Toolbox kunnen zien.
-
Laat zien hoe u het blok [Drive for] naar de werkruimte sleept en onder het blok {When started} plaatst.
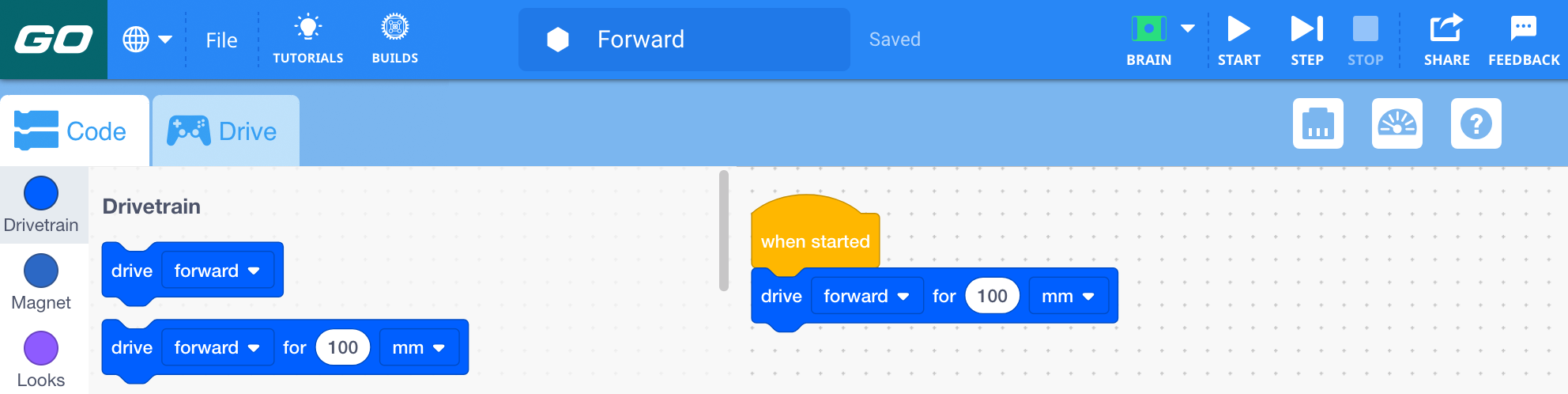
Voeg het blok [Drive for] toe -
Wijzig de parameter van het blok [Drive for] naar 150 mm.
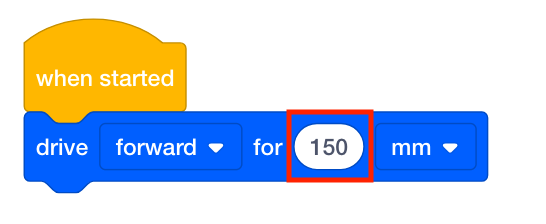
Wijzig de parameter - Model voor studenten om te voorspellen hoe ver de Code Base-robot zal bewegen op basis van de parameters in het blok [Drive for]. Laat de leerlingen de Code Base in de startpositie plaatsen en schat vervolgens in hoe ver de robot zal bewegen. Ze moeten een markering plaatsen op de plek waar ze denken dat de Code Base zal stoppen.
-
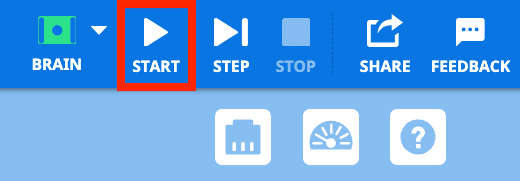
Laat studenten zien hoe ze de knop 'Start' in de werkbalk kunnen selecteren om het project te starten.
- Nadat de studenten het gedrag hebben waargenomen, laat u de studenten zien hoe ze terug kunnen gaan naar hun project en de parameters van het blok [Drive for] kunnen bewerken van 150 mm naar een andere afstand, bijvoorbeeld 200 mm of 250 mm. Start het project vervolgens opnieuw om te zien hoe de wijziging in de parameters de beweging van de Code Base-robot beïnvloedt.
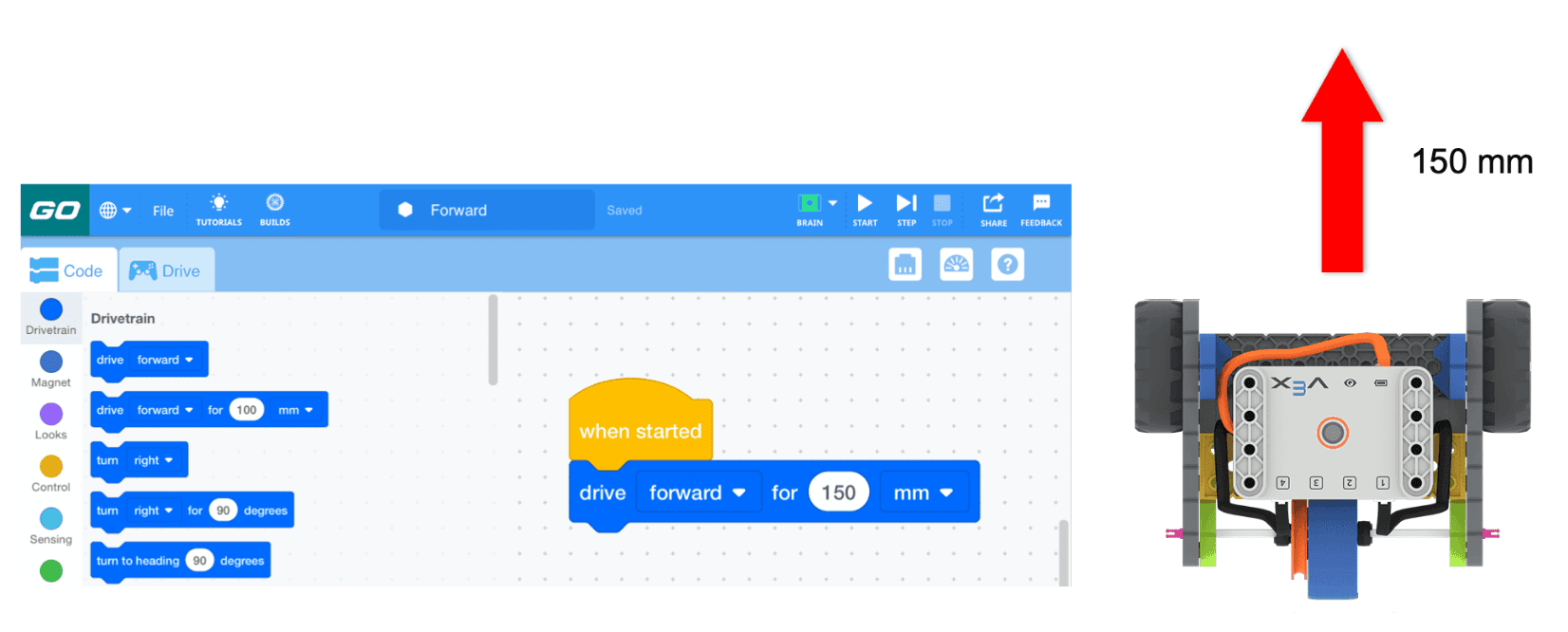
Vooruit 150 mm - FaciliterenFaciliteer een discussie rondom de observaties van studenten en de doelen van het project door het volgende te vragen:
- Kunt u mij met uw handen laten zien hoe ver u dacht dat de Code Base-robot zou kunnen bewegen voordat u met het project begon?
- In welke richting hebt u de afstandsparameter gewijzigd en waarom? Hoe ver denk je dat de Code Base-robot nu kan reizen, nu de afstand is gewijzigd?
- Hoe verhoudt de afgelegde afstand zich tot uw schatting?
- Welke categorie blokken heb je voor dit project gebruikt?

Bespreek de beweging van de codebasisrobot - HerinneringHerinner de leerlingen eraan dat ze mogelijk vragen hebben wanneer ze hun project maken en starten. Herinner leerlingen eraan dat het meerdere pogingen kan kosten om nieuwe concepten te leren. Moedig hen aan om het opnieuw te proberen als het de eerste keer niet lukt.
- VraagVraag de leerlingen om na te denken over hoe ver de Code Base-robot zou moeten rijden om door het klaslokaal te komen. Laat de leerlingen uitleggen waarom dit type planning nuttig is in het dagelijks leven. Vraag de leerlingen hoe het kunnen plannen en het geven van nauwkeurige aanwijzingen nuttig kan zijn voor een bepaalde klus. Vraag de studenten of ze beroepen kunnen bedenken waarbij instructies nodig zijn?
Pauze halverwege het spel & Groepsdiscussie
Zodra elke groep zijn/haar projectheeft afgerond, kom je bij elkaar voor een kort gesprek.
- Is de Code Base-robot terechtgekomen waar je dacht dat hij zou belanden? Zo niet, hoe dicht lag het bij uw voorspelling?
- Hoe heb je je project bewerkt? Welke nieuwe afstand heb je gekozen?
- Hebt u problemen ondervonden bij het wijzigen van de afstand in het blok [Rijden voor]?
Introductie aandrijflijn:
- Nu we hebben onderzocht hoe we VEXcode GO kunnen gebruiken om onze Code Base-robot vooruit te laten rijden, waarom denk je dat er een "Aandrijflijn"-sectie met blokken is?
- Wat denk je dat een aandrijflijn is? Kunt u uw gedachtegang toelichten?
- Kunt u mij met behulp van gebaren laten zien waar volgens u de aandrijflijn zich bevindt op de Code Base-robot?
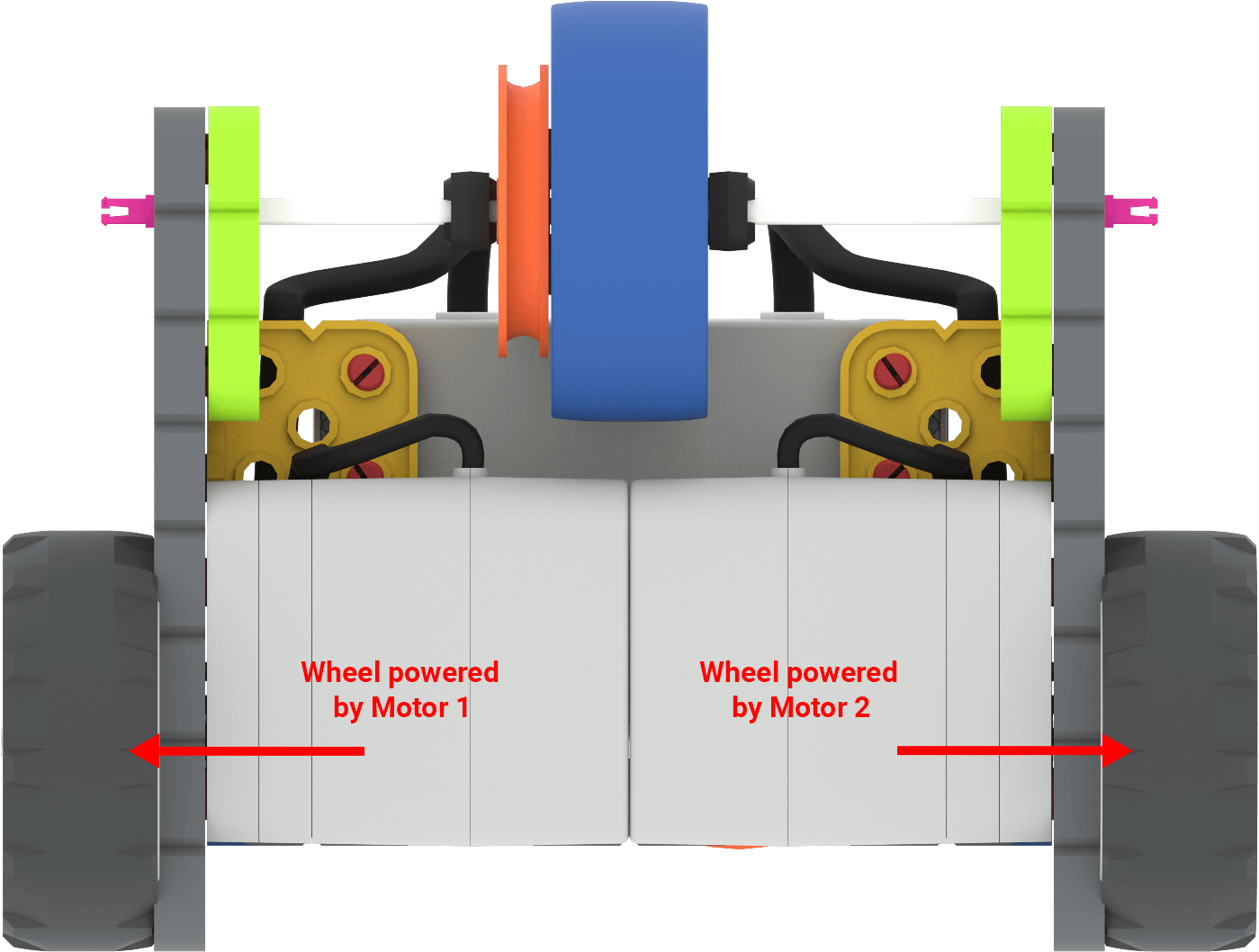
- Kunt u naar de onderkant van uw Code Base-robot kijken en vaststellen waar de motoren zich in de aandrijflijn bevinden en aan welke wielen ze zijn bevestigd?
Deel 2 - Stap voor stap
- InstructieGeef de leerlingen de opdracht om te onderzoeken hoe ze hun Code Base-robot vooruit en achteruit kunnen laten bewegen!
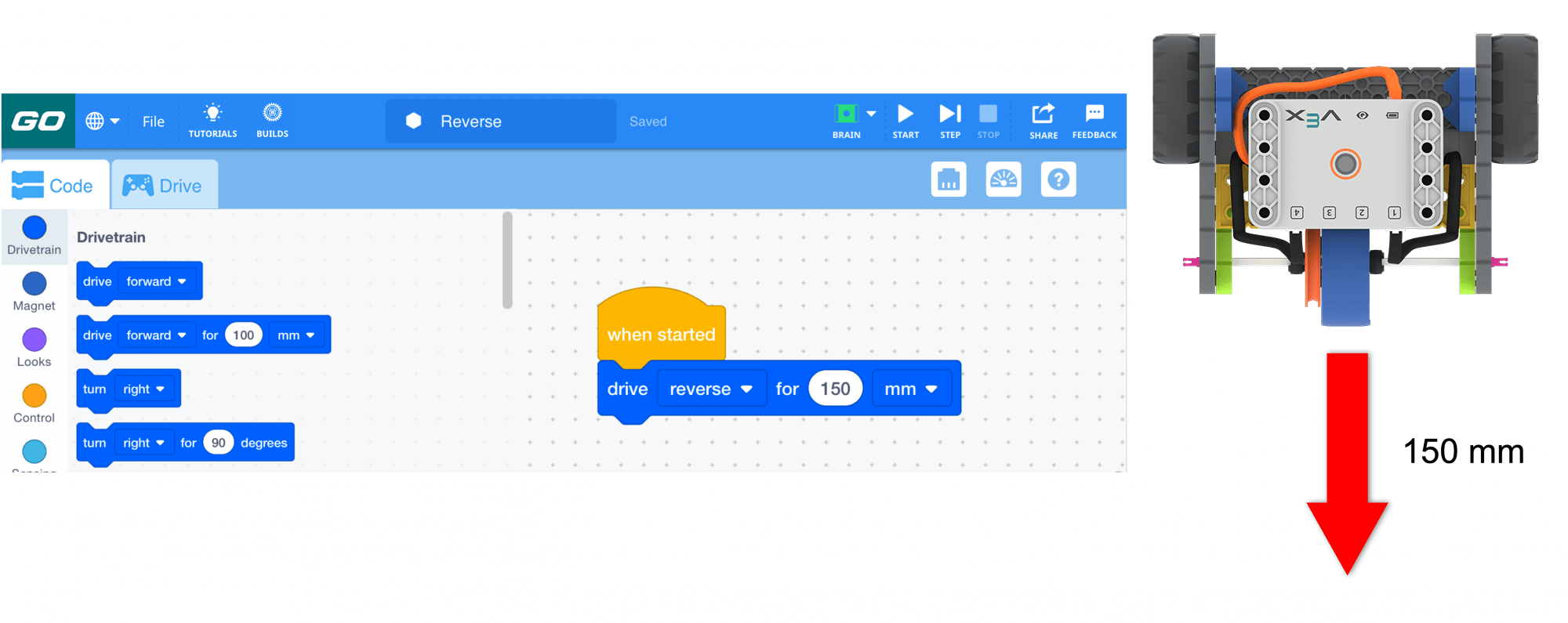
Om te beginnen moet elke groep beschikken over een apparaat, VEXcode GO, minimaal één plaatsingsmarkering en een ingebouwde codebasis. Bekijk de onderstaande animatie om te zien hoe de Code Base achteruit beweegt. In de animatie start de Code Base in de linkerbovenhoek van de tegel, rijdt 150 mm achteruit en stopt dan. Vervolgens keert de auto terug naar de startpositie en rijdt 75 mm achteruit.
Videobestand - ModelModel voor studenten die leren hoe ze VEXcode GO op een apparaat kunnen starten en hun project kunnen hernoemen naar Reverse. Laat leerlingen zien dat ze 'Opslaan als' kunnen selecteren om dit project apart van hun eerste project op te slaan.
Raadpleeg de stappen in het artikel Een project openen en opslaanvoor meer informatie.
-
Modelleer hoe de parameter op het [Drive for]-blok moet worden gewijzigd zodat de codebasis achteruit rijdt.
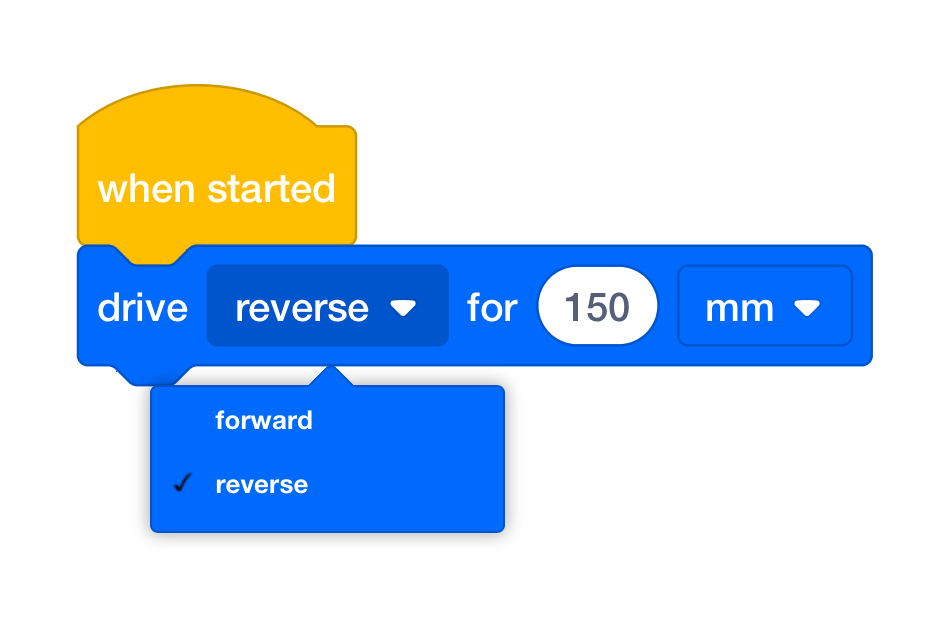
Wijzig de parameter (omgekeerd) - Gebruik hetzelfde schattingsproces als in Speldeel 1. Laat de leerlingen de Code Base in de startpositie plaatsen en schat vervolgens in hoe ver de robot zal bewegen. Ze moeten een markering plaatsen op de plek waar ze denken dat de Code Base zal stoppen.
-
Laat de leerlingen met hun projecten beginnen. You may need to remind them of the steps to Connect a VEX GO Brain if connection issues occur.
Achteruit 150mm - Nadat de leerlingen het gedrag bij achteruitrijden hebben waargenomen, laat u de leerlingen zien hoe ze terug moeten naar hun project. Vervolgens moeten ze hun project hernoemen naarForward en Reverse naar. Raadpleeg de stappen in het artikel Openen en opslaanVEX-bibliotheek voor meer informatie.
-
Model voor studenten hoe ze een tweede [Drive for]-blok kunnen toevoegen. Bij het ene [Drive for]-blok moet de robot vooruit rijden, en bij het tweede blok moet de robot achteruit rijden. Modelleer hoe de parameters van de [Drive for]-blokken moeten worden bewerkt en start het project vervolgens opnieuw om te zien hoe de wijziging in de parameters de beweging van de Code Base-robot beïnvloedt.
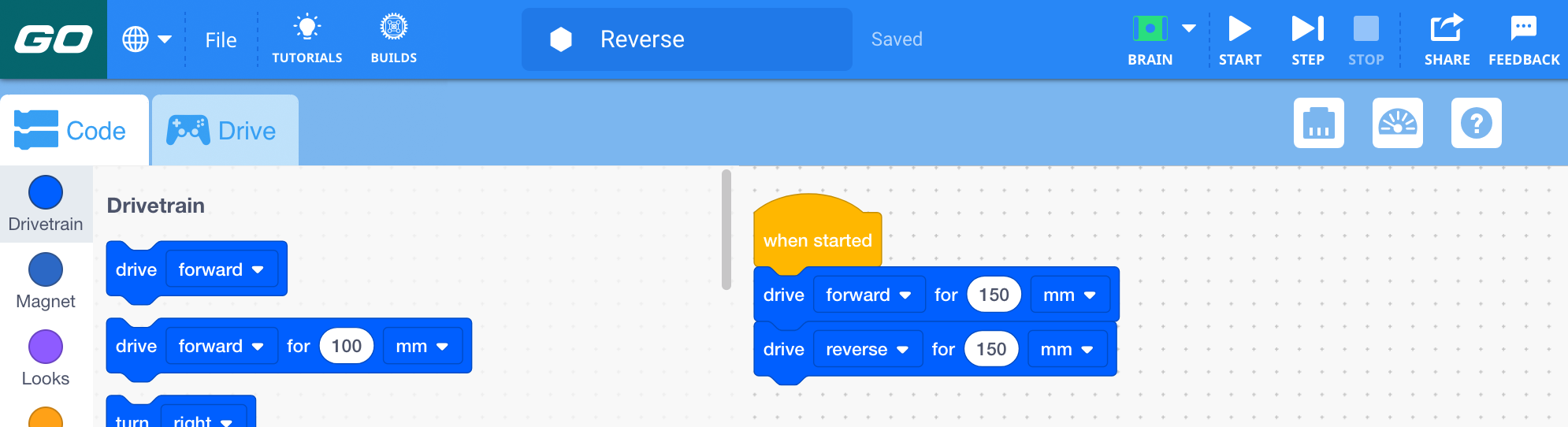
Vooruit en achteruit
-
- FaciliterenFaciliteer een discussie terwijl studenten hun projecten bewerken en het gedrag van de robot observeren door het volgende te vragen:
- Kunt u mij met uw handen laten zien hoe ver u dacht dat de Code Base-robot zou bewegen voordat u het project uitvoerde?
- In welke richting hebt u de afstandsparameter gewijzigd en waarom? Hoe ver denk je dat de Code Base-robot nu kan reizen, nu de afstand is gewijzigd?
- Heb je ze zo ingesteld dat ze dezelfde afstand afleggen toen je een nieuw [Drive for]-blok toevoegde? Moeten ze hetzelfde zijn? Waarom wel of waarom niet?
- Als mijn Code Base-robot is gecodeerd om 100 mm vooruit te rijden, hoe ver moet ik de afstand dan aanpassen als ik wil dat de robot twee keer zo ver rijdt?
Bespreek de beweging van de codebasisrobot - HerinneringHerinner studenten eraan dat ze mogelijk vragen hebben wanneer ze hun project bewerken en starten. Herinner leerlingen eraan dat het meerdere pogingen kan kosten om nieuwe concepten te leren. Moedig hen aan om het opnieuw te proberen als het toevoegen en bewerken van blokken in het project niet lukt.
- VraagVraag de leerlingen om na te denken over hoe de Code Base-robot zou moeten bewegen als ze wilden dat hij naar de deuropening reed en vervolgens weer terug naar waar hij begon. Welke taken of klussen kan de Code Base-robot nu uitvoeren, zodat hij vooruit en achteruit kan bewegen? Vraag de leerlingen een taak te bedenken die de Code Base-robot nu zou kunnen uitvoeren met behulp van voorwaartse en achterwaartse bewegingen.
Optioneel: Groepen mogen hun Code Base-robot deconstrueren indien nodig op dit punt in de ervaring. Ze zullen dezelfde build gebruiken in de volgende labs, dus dit is een optie voor docenten.