
يلعب
الجزء الأول - خطوة بخطوة
- تعليماتأرشد الطلاب إلى كيفية استكشاف كيفية تحريك روبوت قاعدة التعليمات
البرمجية الخاصة بهم إلى الأمام! قبل أن يبدأوا المشروع، فإنهم سيتوقعون المكان الذي سينتهي
إليه روبوت قاعدة التعليمات البرمجية. شاهد الرسوم المتحركة أدناه لرؤية أمثلة لقاعدة التعليمات
البرمجية تتحرك للأمام لمسافات مختلفة. في الرسوم المتحركة، يبدأ Code Base في الزاوية اليسرى
السفلية للمربع ويتحرك أولاً للأمام مسافة 150 ملم ثم يتوقف. ثم يظهر مرة أخرى في موقع البداية،
ويتحرك للأمام مسافة 75 ملم ويتوقف.
ملف الفيديو
- النموذجنموذج لكيفية تشغيل VEXcode GO على جهاز وإنشاء مشروع يحرك قاعدة
التعليمات البرمجية للأمام باستخدام كتلة [Drive for].
- نموذج للطلاب خطوات Open and Save a Project مقالة مكتبة VEX ويكون عليهم اتباع الخطوات لفتح مشروعهم وحفظه.
- اطلب من الطلاب تسمية مشروعهم للأمام.
- اطلب من الطلاب بعد ذلك ربط الدماغ من روبوت Code Base الخاص بهم إلى أجهزتهم.
- بمجرد أن يقوم الطلاب بتسمية مشروعهم وربط الدماغ بجهازهم، يحتاجون إلى اتباع الخطوات لتكوين روبوت قاعدة الكود. نموذج الخطوات منتكوين قاعدة التعليمات البرمجية مقالة مكتبة VEX والتأكد من الطلاب يستطيع انظر كتل نظام الدفع في صندوق الأدوات.
-
أظهر كيفية سحب الكتلة [Drive for] إلى مساحة العمل ووضعها أسفل الكتلة {متى بدأ}.
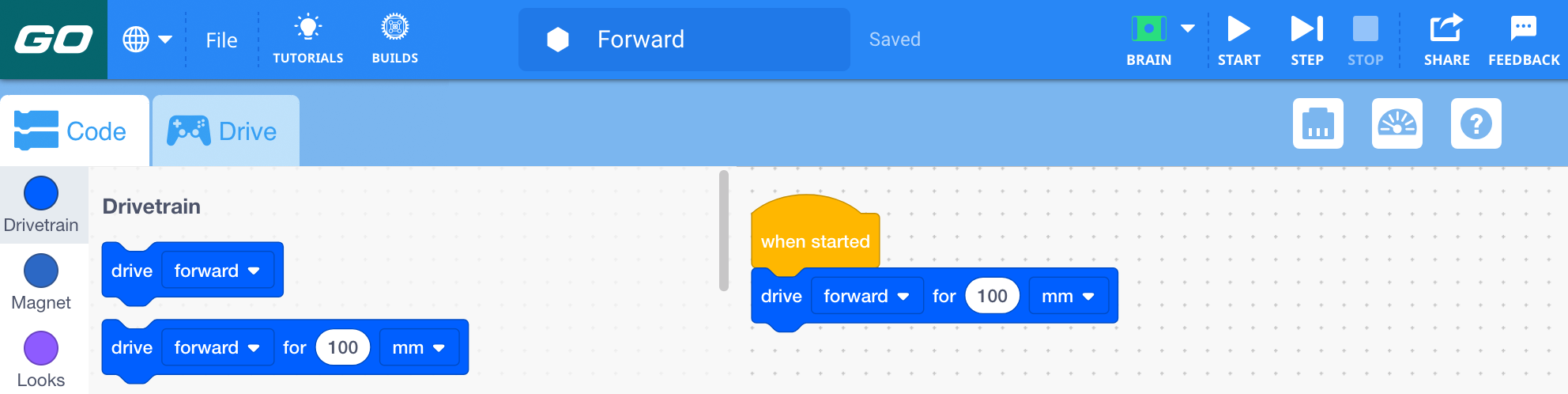
أضف كتلة [Drive for] -
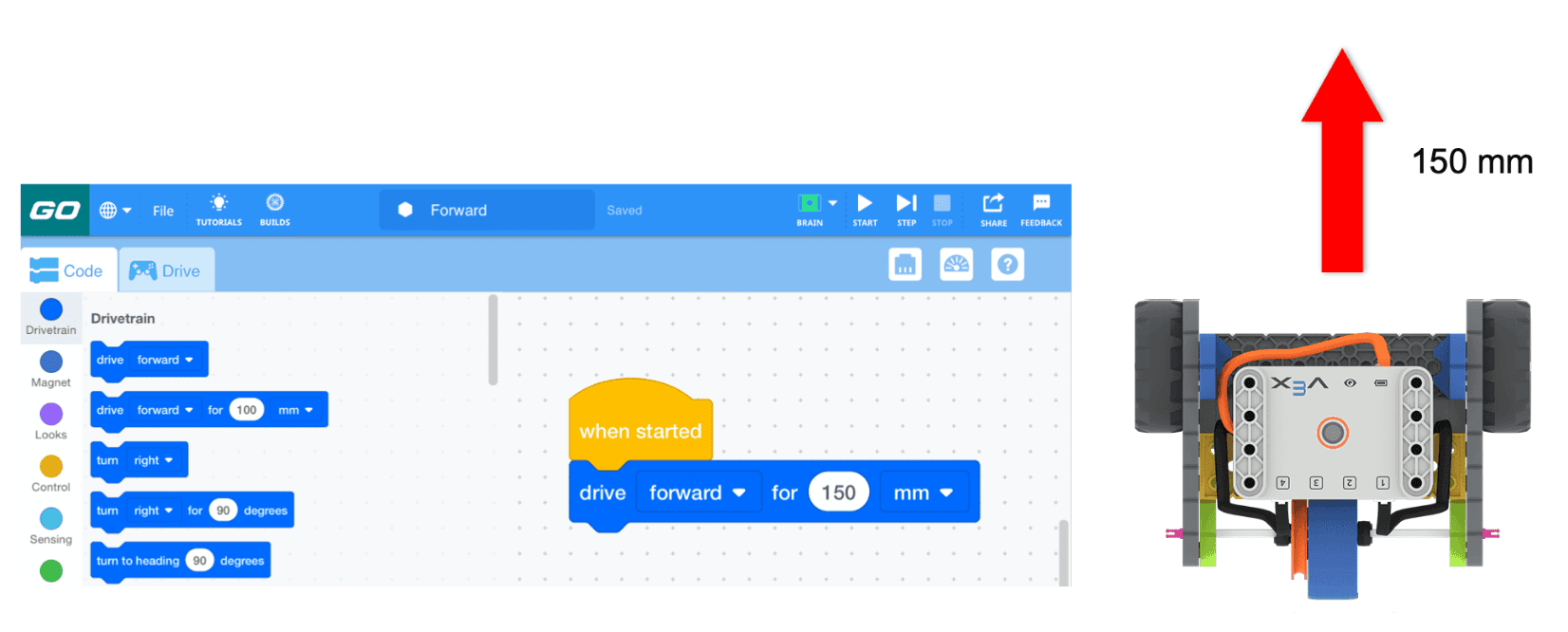
قم بتغيير معلمة كتلة [Drive for] إلى 150 مم.
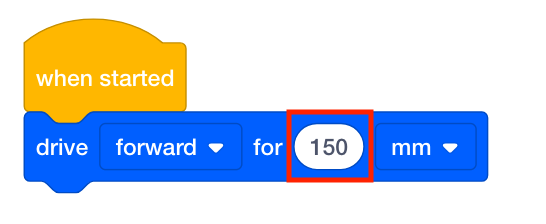
تغيير المعلمة - نموذج للطلاب حول كيفية التنبؤ بالمسافة التي سيتحرك بها روبوت قاعدة التعليمات البرمجية استنادًا إلى المعلمات الموجودة في كتلة [القيادة من أجل]. اطلب من الطلاب وضع قاعدة التعليمات البرمجية في موضع البداية، ثم تقدير المسافة التي سيتحركها الروبوت. ينبغي عليهم وضع علامة حيث يعتقدون أن قاعدة التعليمات البرمجية ستتوقف.
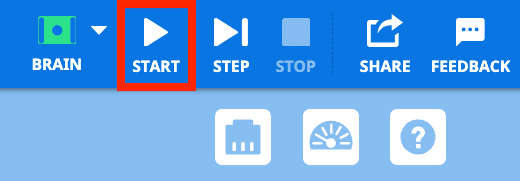
-
نموذج للطلاب حول كيفية اختيار زر "ابدأ" في شريط الأدوات لبدء المشروع.
- بمجرد أن يلاحظ الطلاب السلوك، قم بعمل نموذج للطلاب حول كيفية العودة إلى مشروعهم، وتحرير معلمات كتلة [القيادة من أجل] من 150 مم إلى مسافة أخرى، مثل 200 مم أو 250 مم. بعد ذلك، ابدأ المشروع مرة أخرى لترى كيف أثر التغيير في المعلمات على حركة روبوت قاعدة التعليمات البرمجية.
للأمام 150 مم - تسهيلتسهيل المناقشة حول ملاحظات الطلاب وأهداف المشروع من خلال طرح الأسئلة
التالية:
- هل يمكنك أن تظهر لي باستخدام يديك إلى أي مدى كنت تعتقد أن روبوت Code Base سيتحرك قبل أن تبدأ المشروع؟
- ما الذي قمت بتغيير معلمة المسافة إليه ولماذا؟ ما المسافة التي تعتقد أن روبوت Code Base سوف يسافرها الآن بعد أن تغيرت المسافة؟
- كيف كانت المسافة المقطوعة مقارنة بتقديراتك؟
- ما هي فئة الكتل التي استخدمتها لهذا المشروع؟

مناقشة حركة الروبوت في قاعدة الكود - تذكيرذكّر الطلاب بأنه قد تكون لديهم أسئلة أثناء إنشاء مشروعهم وبدء العمل فيه. ذكّر الطلاب بأن تعلم المفاهيم الجديدة قد يستغرق محاولات متعددة وشجعهم على المحاولة مرة أخرى إذا لم ينجحوا في المحاولة الأولى.
- اسألاطلب من الطلاب أن يفكروا في المسافة التي يجب أن يتحركها روبوت قاعدة التعليمات البرمجية للسفر عبر الفصل الدراسي. اطلب من الطلاب أن يربطوا بين سبب كون هذا النوع من التخطيط مفيدًا في الحياة اليومية. اسأل الطلاب كيف يمكن أن تكون القدرة على التخطيط وإعطاء توجيهات دقيقة مفيدة للوظيفة؟ اسأل الطلاب إذا كان بإمكانهم التفكير في أي وظائف تتطلب التوجيهات؟
مناقشة جماعية & استراحة منتصف اللعب
بمجرد أن تكمل كل مجموعة مشروعها، يجتمعون معًا لإجراء محادثة قصيرة .
- هل انتهى روبوت Code Base إلى حيث كنت تعتقد أنه سيذهب إليه؟ إذا لم يكن الأمر كذلك، فما مدى قربه من توقعاتك؟
- كيف قمت بتحرير مشروعك؟ ما هي المسافة الجديدة التي اخترتها؟
- هل واجهت أي صعوبة عند تغيير المسافة في كتلة [القيادة من أجل]؟
تقديم نظام نقل الحركة:
- الآن بعد أن اكتشفنا كيفية استخدام VEXcode GO للسماح لروبوت Code Base الخاص بنا بالمضي قدمًا، لماذا تعتقد أن هناك قسم "Drivetrain" في الكتل؟
- ما هو برأيك نظام نقل الحركة؟ هل يمكنك أن تشرح تفكيرك؟
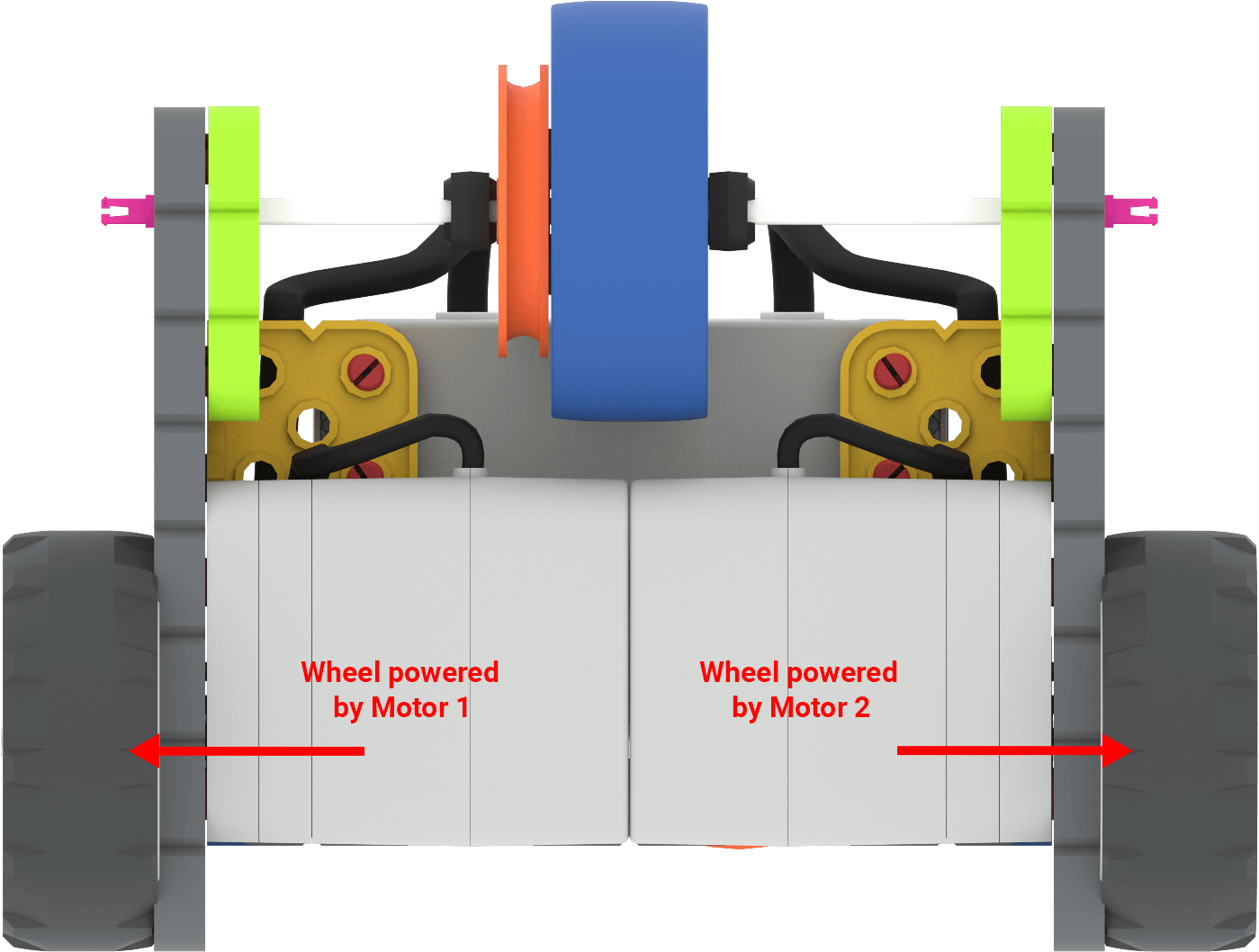
- هل يمكنك أن تظهر لي باستخدام الإيماءات المكان الذي تعتقد أن نظام نقل الحركة موجود فيه على روبوت Code Base؟
- هل يمكنك النظر إلى الجزء السفلي من روبوت Code Base الخاص بك وتحديد مكان وجود المحركات في نظام نقل الحركة هذا، وما هي العجلات التي يتم توصيلها بها؟
الجزء الثاني - خطوة بخطوة
- تعليماتأرشد الطلاب إلى كيفية استكشاف كيفية تحريك روبوت قاعدة التعليمات
البرمجية الخاصة بهم إلى الأمام والخلف!
للبدء، يجب أن يكون لدى كل مجموعة جهاز، VEXcode GO، وعلامة وضع واحدة على الأقل، وقاعدة تعليمات برمجية مبنية. شاهد الرسوم المتحركة أدناه لترى كيف تتحرك قاعدة التعليمات البرمجية في الاتجاه المعاكس. في الرسوم المتحركة، يبدأ Code Base في الزاوية اليسرى العليا للبلاط، ويتحرك للخلف بمقدار 150 ملم، ثم يتوقف. ثم يعود إلى وضع البداية ويتحرك للخلف لمسافة 75 ملم.
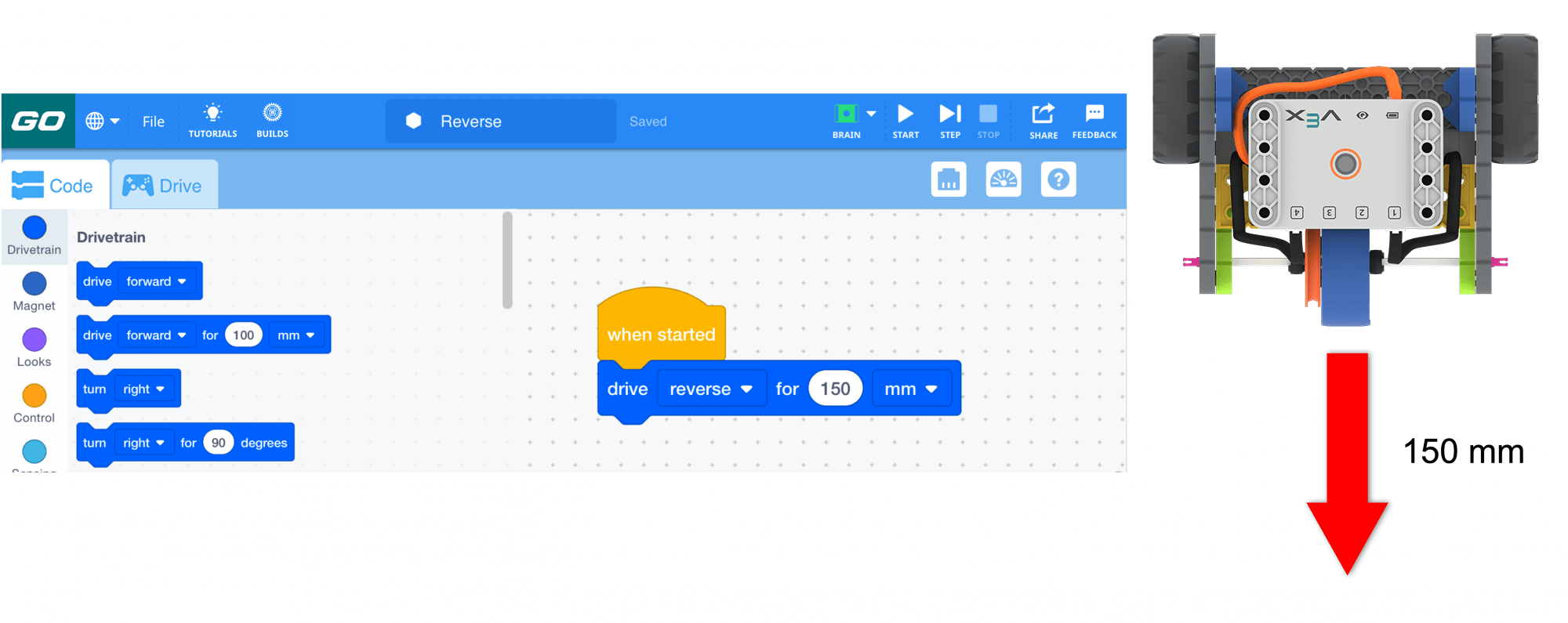
ملف الفيديو - النموذجنموذج للطلاب حول كيفية تشغيل VEXcode GO على جهاز وإعادة تسمية
مشروعهم باسم Reverse. أظهر للطلاب كيفية تحديد "حفظ باسم" لحفظ هذا المشروع بشكل منفصل عن
مشروعهم الأول.
Refer to the steps in the Open and Save a Project article for more information.
-
نموذج لكيفية تغيير المعلمة الموجودة في كتلة [Drive for] لجعل محرك Code Base في الاتجاه المعاكس.
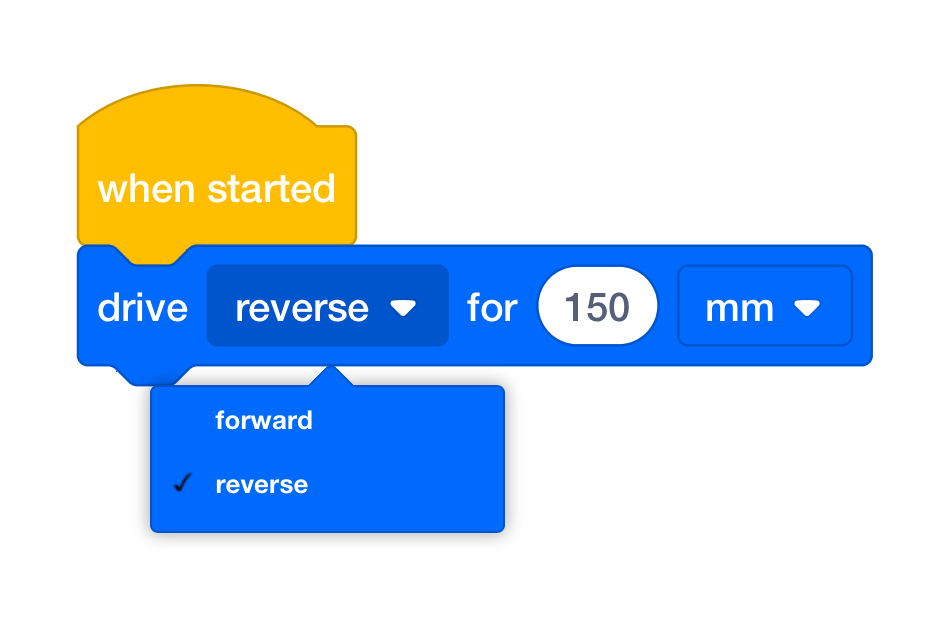
تغيير المعلمة (عكسي) - استخدم نفس عملية التقدير كما في الجزء الأول من اللعبة. اطلب من الطلاب وضع قاعدة التعليمات البرمجية في موضع البداية، ثم تقدير المسافة التي سيتحركها الروبوت. ينبغي عليهم وضع علامة حيث يعتقدون أن قاعدة التعليمات البرمجية ستتوقف.
-
اطلب من الطلاب أن يبدؤوا مشاريعهم. You may need to remind them of the steps to Connect a VEX GO Brain if connection issues occur.
عكس 150 مم - بمجرد أن يلاحظ الطلاب سلوك القيادة في الاتجاه المعاكس، قم بعمل نموذج للطلاب حول كيفية العودة إلى مشروعهم. ينبغي عليهم بعد ذلك إعادة تسمية مشروعهمللأمام وللخلف. Refer to the steps in the Open and Save VEX Library article for more information.
-
نموذج للطلاب حول كيفية إضافة كتلة [Drive for] ثانية. يجب أن يكون لدى كتلة [القيادة من أجل] الروبوت قيادة للأمام، ويجب أن يكون لدى الكتلة الثانية الروبوت قيادة للخلف. قم بإنشاء نموذج لكيفية تحرير معلمات كتل [Drive for]، ثم ابدأ المشروع مرة أخرى لترى كيف أثر التغيير في المعلمات على حركة روبوت قاعدة التعليمات البرمجية.
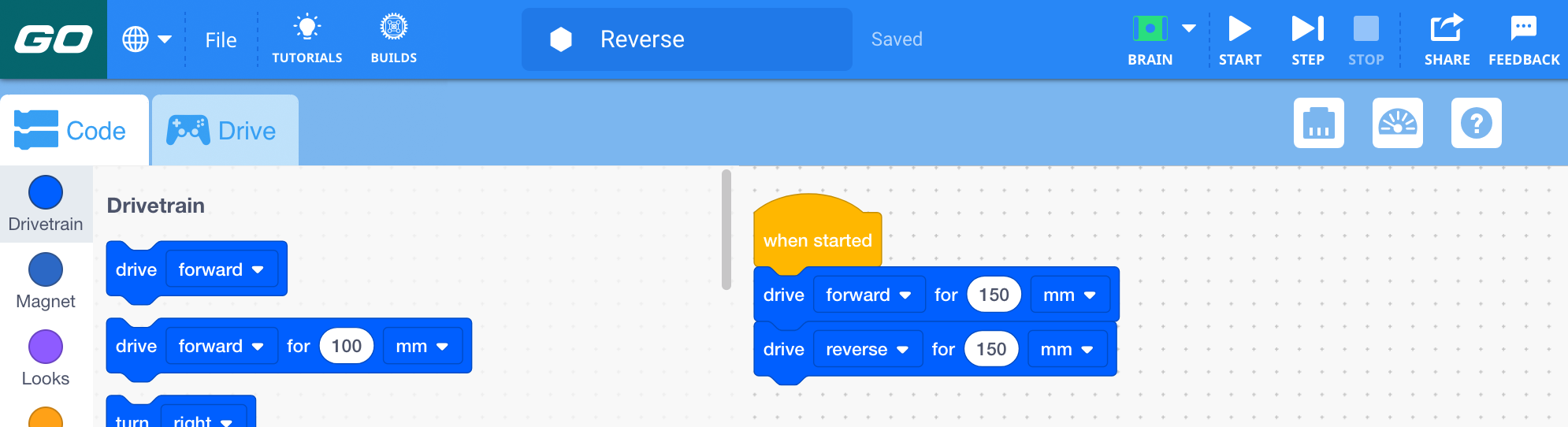
للأمام والخلف
-
- تسهيل المناقشةقم بتسهيل المناقشة أثناء قيام الطلاب بتحرير مشاريعهم ومراقبة
سلوك الروبوت من خلال طرح الأسئلة التالية:
- هل يمكنك أن تظهر لي باستخدام يديك إلى أي مدى كنت تعتقد أن روبوت Code Base سيتحرك قبل تشغيل المشروع؟
- ما الذي قمت بتغيير معلمة المسافة إليه ولماذا؟ ما المسافة التي تعتقد أن روبوت Code Base سوف يسافرها الآن بعد أن تغيرت المسافة؟
- عندما قمت بإضافة كتلة [Drive for] أخرى، هل قمت بتعيينها للسفر بنفس المسافة؟ هل يجب أن يكونا نفس الشيء؟ لماذا أو لماذا لا؟
- إذا تم برمجة روبوت Code Base الخاص بي للتحرك للأمام مسافة 100 مم، فإلى أي مدى سأحتاج إلى تغيير هذه المسافة إذا كنت أريد أن أتحرك لمسافة مضاعفة؟
مناقشة حركة الروبوت في قاعدة الكود - تذكيرتذكير أنه قد يكون لدى الطلاب أسئلة أثناء تحرير مشروعهم وبدء العمل فيه. ذكّر الطلاب بأن تعلم المفاهيم الجديدة قد يستغرق محاولات متعددة وشجعهم على المحاولة مرة أخرى إذا لم ينجحوا في إضافة وتحرير الكتل في المشروع.
- اسألاطلب من الطلاب أن يفكروا في الكيفية التي يجب أن يتحرك بها روبوت قاعدة التعليمات البرمجية، وما إذا كانوا يريدون منه القيادة إلى المدخل، ثم العودة إلى حيث بدأ. ما هي أنواع المهام أو الوظائف التي يمكن لروبوت Code Base القيام بها الآن والتي يمكنها التحرك للأمام والخلف؟ اطلب من الطلاب اقتراح مهمة يمكن لروبوت Code Base إكمالها الآن باستخدام الحركات للأمام والخلف.
اختياري: يمكن للمجموعات تفكيك روبوت قاعدة التعليمات البرمجية الخاصة بهم إذا لزم الأمر في هذه المرحلة من التجربة. سوف يستخدمون نفس البناء في المختبرات اللاحقة، لذا يعد هذا خيارًا للمعلم.