
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนสำรวจวิธีการเคลื่อนย้ายหุ่นยนต์ Code Base
ของพวกเขาไปข้างหน้า! ก่อนที่พวกเขาจะเริ่มโครงการ พวกเขาจะทำนายว่าหุ่นยนต์ Code Base
จะไปสิ้นสุดที่ใด ชมแอนิเมชั่นด้านล่างเพื่อดูตัวอย่างของ Code Base
ที่เคลื่อนไปข้างหน้าในระยะทางที่แตกต่างกัน ในแอนิเมชั่น
โค้ดฐานจะเริ่มต้นที่มุมล่างซ้ายของไทล์ จากนั้นจะเคลื่อนไปข้างหน้า 150 มม. ก่อน
จากนั้นจึงหยุด จากนั้นจะปรากฏที่ตำแหน่งเริ่มต้นอีกครั้ง และขับไปข้างหน้า 75 มม.
จากนั้นจึงหยุด
ไฟล์วีดีโอ
- แบบจำลองแบบจำลองวิธีเปิดใช้งาน VEXcode GO
บนอุปกรณ์และสร้างโปรเจ็กต์ที่ย้ายฐานโค้ดไปข้างหน้าด้วยบล็อก [Drive for]
- แบบจำลองสำหรับนักเรียนขั้นตอนของ เปิด และบันทึกโครงการ บทความห้องสมุด VEX และ ให้พวกเขาทำตามขั้นตอนเพื่อเปิดและบันทึกโปรเจ็กต์
- สั่งให้นักเรียนตั้งชื่อโครงการของตนเอง ส่งต่อ
- มีนักเรียนแล้ว เชื่อมต่อสมอง ของหุ่นยนต์ Code Base ไปยังอุปกรณ์ของพวกเขา
- หลังจากที่นักเรียนตั้งชื่อโครงการของตนและเชื่อมต่อ Brain เข้ากับอุปกรณ์แล้ว พวกเขาจะต้องทำตามขั้นตอนเพื่อกำหนดค่าสำหรับหุ่นยนต์ Code Base Model ขั้นตอนจาก ที่ กำหนดค่าฐานรหัส บทความห้องสมุด VEX และมั่นใจ นักเรียนสามารถดูบล็อกระบบขับเคลื่อนในกล่องเครื่องมือ.
-
แสดงวิธีลากบล็อก [ไดรฟ์สำหรับ] เข้าไปในพื้นที่ทำงานและวางไว้ใต้บล็อก {When started}
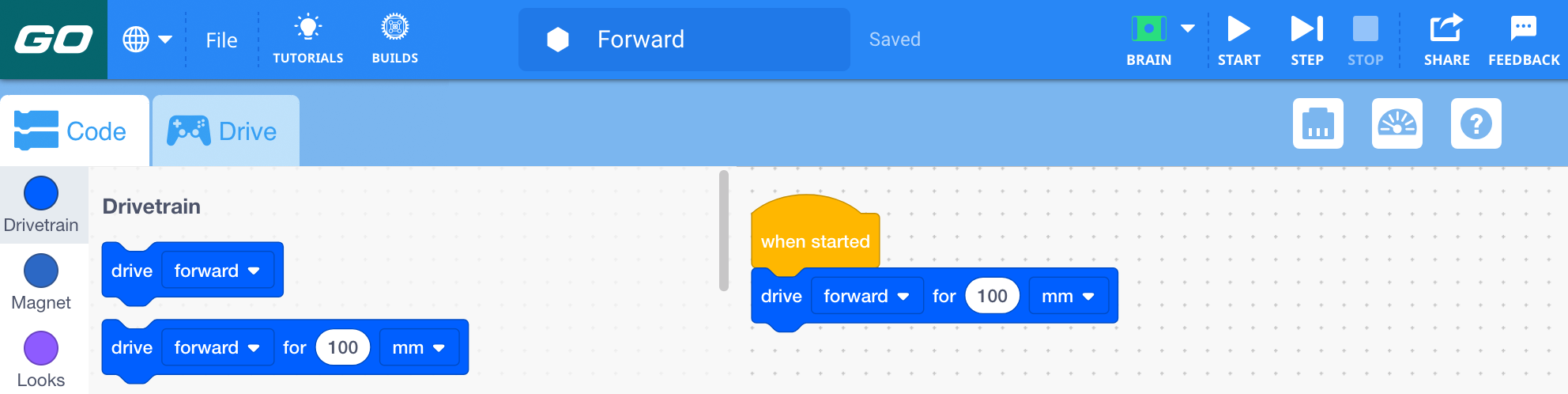
เพิ่มบล็อค [Drive for] -
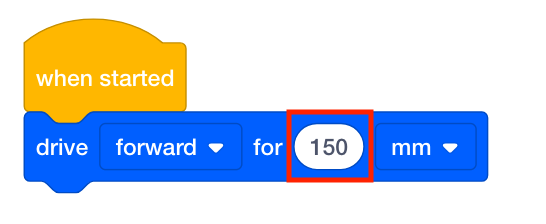
เปลี่ยนพารามิเตอร์ของบล็อก[ไดรฟ์สำหรับ] เป็น 150 มม.
เปลี่ยนพารามิเตอร์ - แบบจำลองสำหรับให้นักเรียนคาดการณ์ว่าหุ่นยนต์ Code Base จะเคลื่อนที่ไปได้ไกลแค่ไหนโดยอิงจากพารามิเตอร์ในบล็อก [Drive for] ให้เด็กนักเรียนวางฐานโค้ดไว้ที่ตำแหน่งเริ่มต้น จากนั้นประมาณว่าหุ่นยนต์จะเคลื่อนที่ไปไกลแค่ไหน พวกเขาควรวางเครื่องหมายไว้ตรงจุดที่คิดว่าฐานโค้ดจะหยุด
-
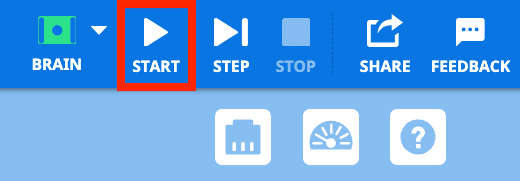
แบบจำลองสำหรับนักเรียนในการเลือกปุ่ม 'เริ่ม' บนแถบเครื่องมือเพื่อเริ่มต้นโครงการ
- หลังจากที่นักเรียนได้สังเกตพฤติกรรมแล้ว ให้สร้างแบบจำลองให้กับนักเรียนว่าจะกลับไปยังโปรเจ็กต์ของตนอย่างไร แก้ไขพารามิเตอร์ของบล็อก [ขับเคลื่อนสำหรับ] จาก 150 มม. เป็นระยะทางอื่น เช่น 200 มม. หรือ 250 มม. จากนั้นเริ่มโครงการใหม่อีกครั้งเพื่อดูว่าการเปลี่ยนแปลงพารามิเตอร์ส่งผลต่อการเคลื่อนไหวของหุ่นยนต์ Code Base อย่างไร
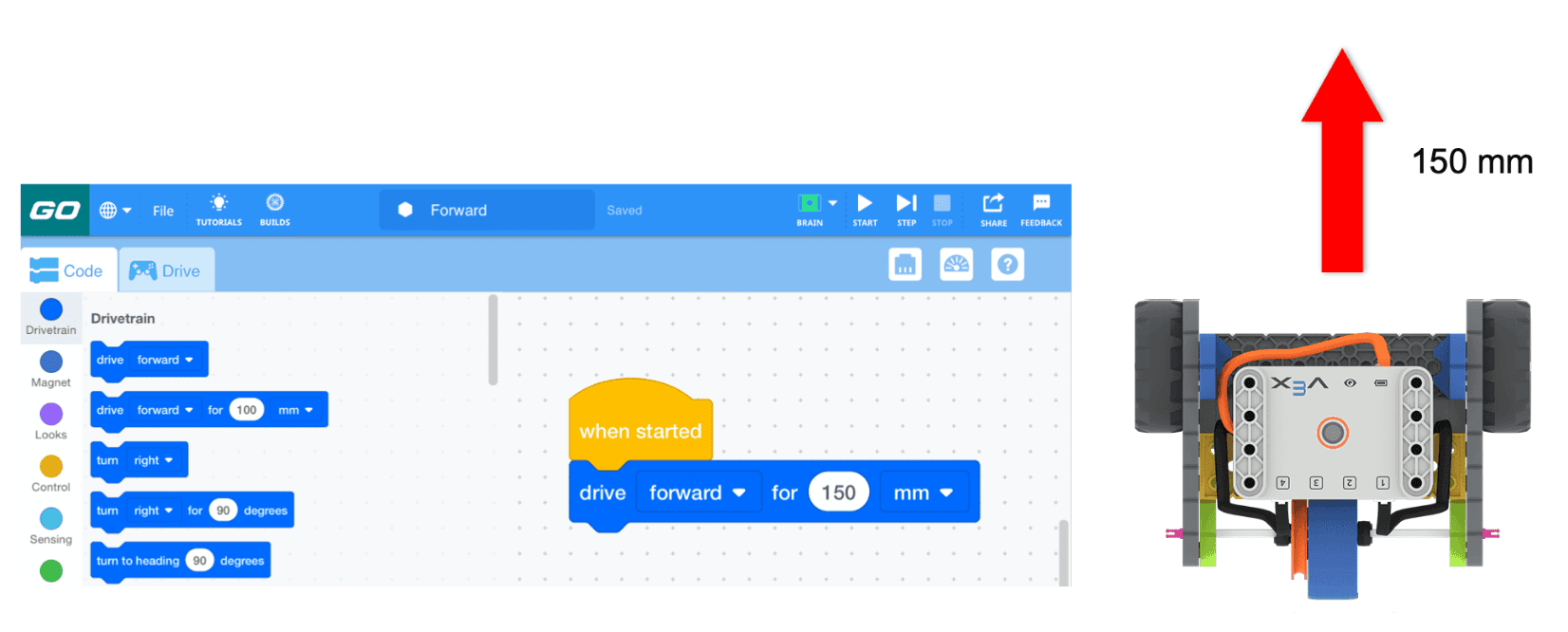
เดินหน้า 150 มม. - อำนวยความสะดวกอำนวยความสะดวกในการอภิปรายเกี่ยวกับการสังเกตของนักเรียนและเป้าหมายของโครงการโดยถามคำถามดังต่อไปนี้:
- คุณแสดงให้ฉันเห็นโดยใช้มือของคุณได้ไหมว่าคุณคิดว่าหุ่นยนต์ Code Base จะเคลื่อนไหวได้ไกลแค่ไหนก่อนที่คุณจะเริ่มโปรเจ็กต์?
- คุณเปลี่ยนพารามิเตอร์ระยะทางเป็นอะไร และทำไม? คุณคิดว่าหุ่นยนต์ Code Base จะเดินทางได้ไกลแค่ไหนเมื่อระยะทางเปลี่ยนไป?
- ระยะทางที่เดินทางเปรียบเทียบกับการประมาณของคุณเป็นอย่างไรบ้าง?
- คุณใช้บล็อคประเภทใดสำหรับโครงการนี้?

พูดคุยเรื่องการเคลื่อนไหวของหุ่นยนต์ Code Base - เตือนเตือนนักเรียนว่าพวกเขาอาจมีคำถามเมื่อพวกเขากำลังสร้างและเริ่มต้นโครงการของพวกเขา เตือนใจนักเรียนว่าการเรียนรู้แนวคิดใหม่ๆ อาจต้องลองหลายครั้ง และสนับสนุนให้นักเรียนลองอีกครั้งหากไม่สำเร็จในครั้งแรก
- ถามขอให้เด็กนักเรียนคิดว่าหุ่นยนต์ Code Base จะต้องเคลื่อนที่ไปได้ไกลแค่ไหนเพื่อเดินทางข้ามห้องเรียน ให้ผู้เรียนเชื่อมโยงว่าทำไมการวางแผนประเภทนี้จึงมีประโยชน์ในชีวิตประจำวัน ถามนักเรียนว่าการวางแผนและให้คำแนะนำที่แม่นยำจะเป็นประโยชน์ต่อการทำงานได้อย่างไรบ้าง ถามนักเรียนว่าพวกเขาสามารถนึกถึงงานใดๆ ที่ต้องมีการบอกทิศทางได้หรือไม่
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
เมื่อกลุ่ม แต่ละกลุ่มเสร็จสิ้นโครงการให้มารวมตัวกันเพื่อพูดคุยสั้นๆ
- หุ่นยนต์ Code Base ไปจบลงที่ที่คุณคิดไว้หรือเปล่า? ถ้าไม่เป็นเช่นนั้น จะใกล้เคียงกับคำทำนายของคุณแค่ไหน?
- คุณแก้ไขโครงการของคุณอย่างไร? คุณเลือกระยะทางใหม่เป็นเท่าไร?
- คุณพบปัญหาใด ๆ เมื่อเปลี่ยนระยะทางในบล็อค [ขับสำหรับ] หรือไม่
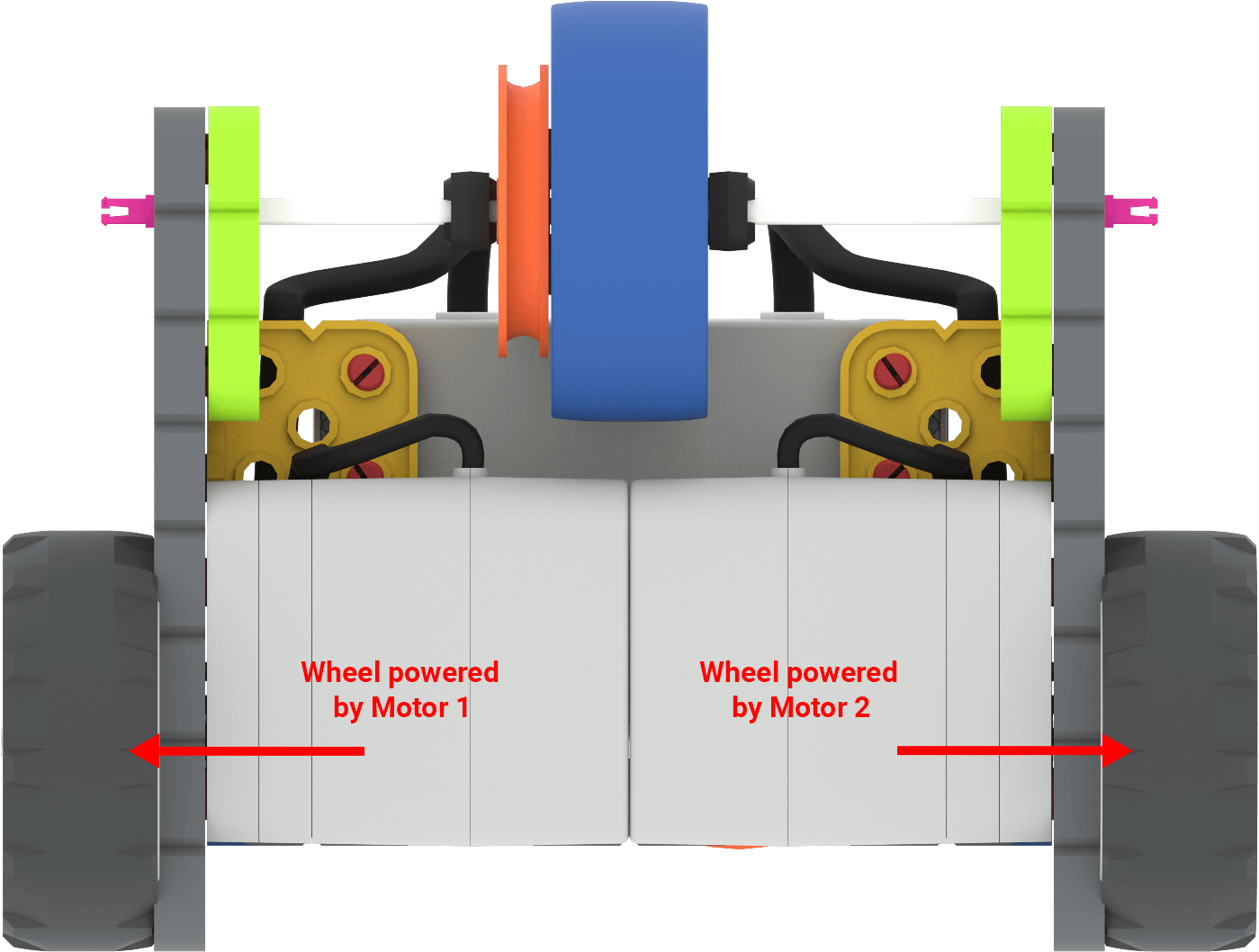
แนะนำระบบส่งกำลัง:
- ตอนนี้เราได้สำรวจวิธีใช้ VEXcode GO เพื่อให้หุ่นยนต์ Code Base ของเราขับเคลื่อนไปข้างหน้าแล้ว ทำไมคุณถึงคิดว่ามีส่วน "ระบบขับเคลื่อน" ของบล็อกล่ะ
- คุณคิดว่าระบบส่งกำลังคืออะไร? คุณสามารถอธิบายความคิดของคุณได้ไหม?
- คุณสามารถแสดงให้ฉันเห็นโดยใช้ท่าทางในจุดที่คุณคิดว่าระบบส่งกำลังอยู่บนหุ่นยนต์ Code Base ได้หรือไม่?
- คุณสามารถดูที่ด้านล่างของหุ่นยนต์ Code Base ของคุณและระบุได้หรือไม่ว่ามอเตอร์อยู่ตรงไหนในระบบส่งกำลังและติดอยู่กับล้อไหน
ตอนที่ 2 - ทีละขั้นตอน
- สอนสอนนักเรียนว่าพวกเขาจะสำรวจวิธีการเคลื่อนย้ายหุ่นยนต์ Code Base
ไปข้างหน้าและถอยหลัง!
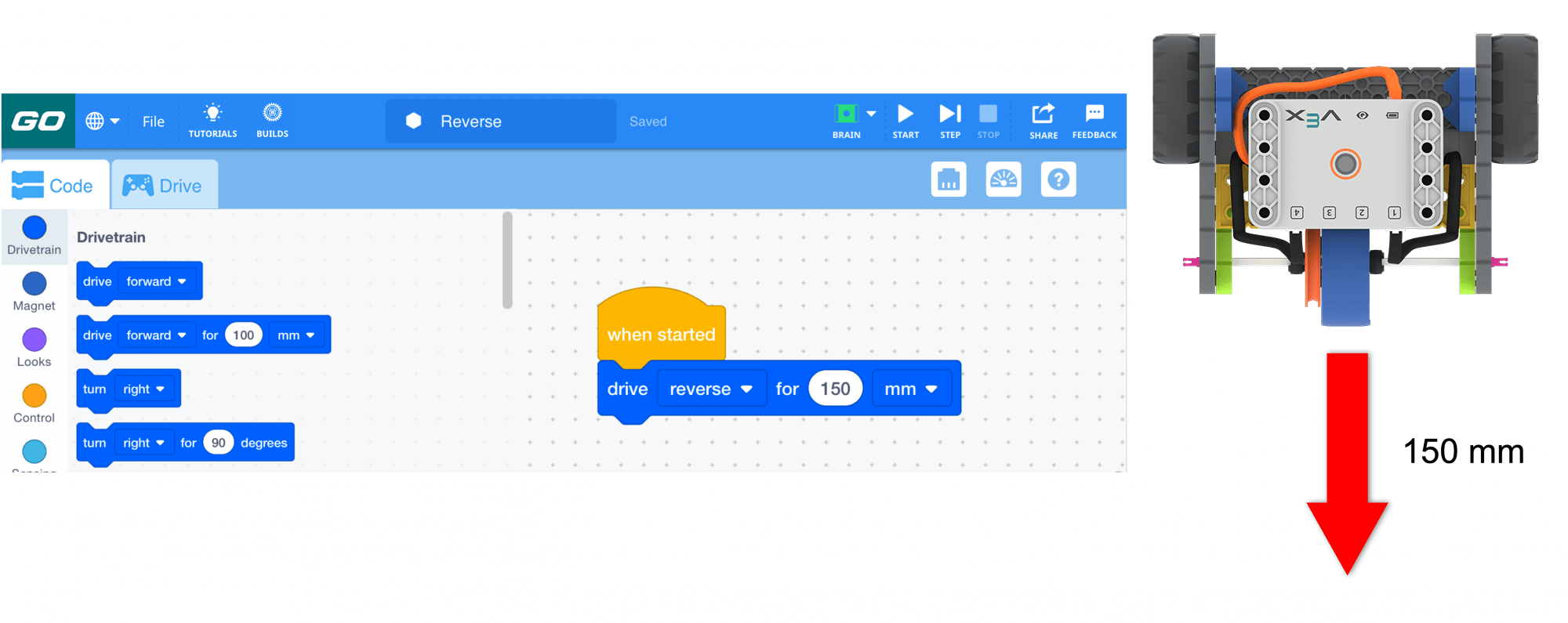
ในการเริ่มต้น แต่ละกลุ่มควรมีอุปกรณ์ VEXcode GO เครื่องหมายตำแหน่งอย่างน้อยหนึ่งตัว และฐานโค้ดที่สร้างขึ้น ชมแอนิเมชั่นด้านล่างเพื่อดูว่า Code Base เคลื่อนไหวย้อนกลับอย่างไร ในแอนิเมชั่น โค้ดเบสจะเริ่มต้นที่มุมซ้ายบนของไทล์ จากนั้นจะขับถอยหลัง 150 มม. จากนั้นจึงหยุด จากนั้นกลับสู่ตำแหน่งเริ่มต้นและขับถอยหลัง 75 มม.
ไฟล์วีดีโอ - แบบจำลอง แบบจำลองสำหรับนักเรียนในการเปิดใช้งาน VEXcode GO
บนอุปกรณ์และเปลี่ยนชื่อโปรเจ็กต์ของพวกเขาเป็นย้อนกลับ แสดงให้เด็กนักเรียนเลือก 'บันทึกเป็น'
เพื่อบันทึกโครงการนี้แยกจากโครงการแรก
อ้างอิงถึงขั้นตอนใน เปิดและบันทึก โครงการ บทความเพื่อดูข้อมูลเพิ่มเติม.
-
จำลองวิธีเปลี่ยนพารามิเตอร์บนบล็อก [Drive for] เพื่อให้ Code Base ขับเคลื่อนแบบย้อนกลับ
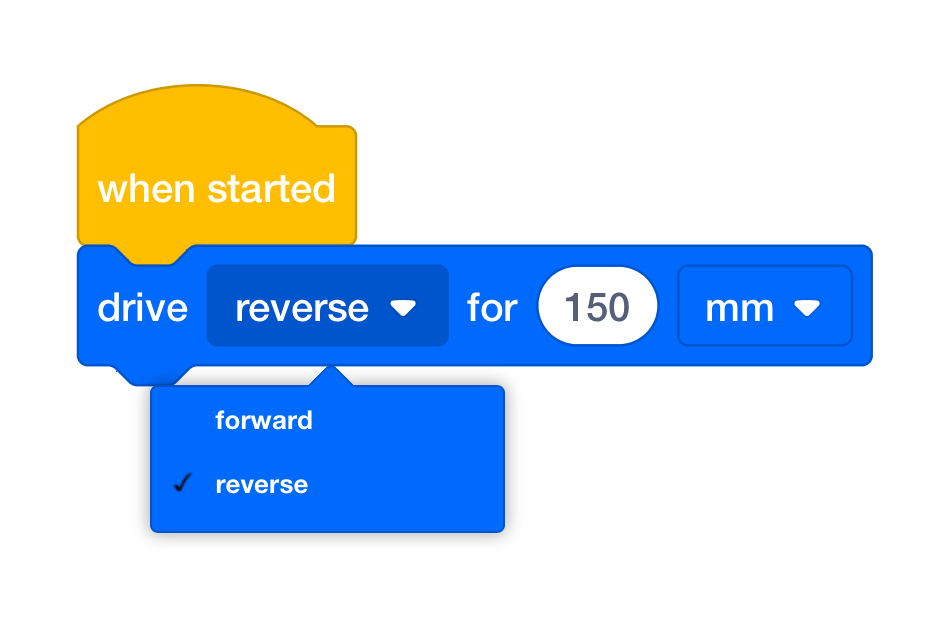
เปลี่ยนพารามิเตอร์ (ย้อนกลับ) - ใช้กระบวนการประมาณการแบบเดียวกันกับในส่วนการเล่นที่ 1 ให้เด็กนักเรียนวางฐานโค้ดไว้ที่ตำแหน่งเริ่มต้น จากนั้นประมาณว่าหุ่นยนต์จะเคลื่อนที่ไปไกลแค่ไหน พวกเขาควรวางเครื่องหมายไว้ตรงจุดที่คิดว่าฐานโค้ดจะหยุด
-
ให้เด็กนักเรียนเริ่มต้นโครงการของพวกเขา คุณอาจต้องเตือนพวกเขาถึงขั้นตอนต่างๆ ถึงเชื่อมต่อ VEX GO Brain หากเกิดปัญหาการเชื่อมต่อ
ถอยหลัง 150มม. - เมื่อนักเรียนได้สังเกตพฤติกรรมการขับรถถอยหลังแล้ว ให้สร้างแบบจำลองให้กับนักเรียนว่าจะต้องกลับไปยังโครงการของตนอย่างไร จากนั้นพวกเขาควรเปลี่ยนชื่อโครงการของตนเป็นเดินหน้าและถอยหลัง อ้างถึง ขั้นตอนใน เปิดและบันทึก บทความ VEX Library สำหรับข้อมูลเพิ่มเติม.
-
แบบจำลองสำหรับนักเรียนในการเพิ่มบล็อค [Drive for] ที่สอง [การขับเคลื่อน] บล็อกหนึ่งควรให้หุ่นยนต์ขับไปข้างหน้า และบล็อกที่สองควรให้หุ่นยนต์ขับถอยหลัง สร้างแบบจำลองวิธีการแก้ไขพารามิเตอร์ของบล็อก [ขับเพื่อ] จากนั้นเริ่มโครงการใหม่อีกครั้งเพื่อดูว่าการเปลี่ยนแปลงพารามิเตอร์ส่งผลต่อการเคลื่อนไหวของหุ่นยนต์ Code Base อย่างไร
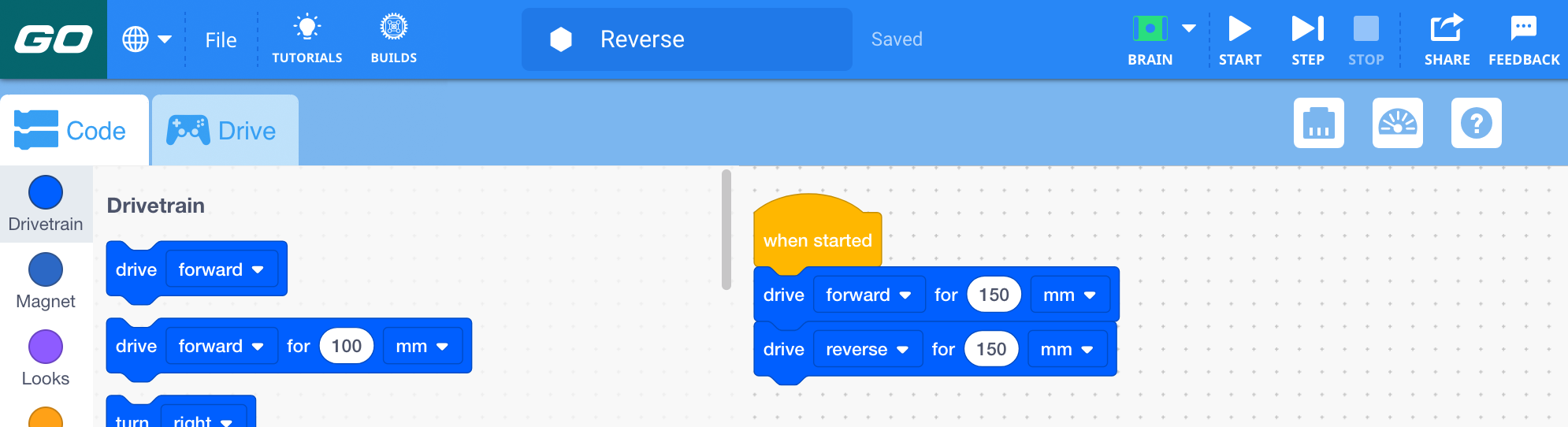
เดินหน้าและถอยหลัง
-
- อำนวยความสะดวกอำนวยความสะดวกในการอภิปรายในขณะที่นักเรียนกำลังแก้ไขโครงการของตนและสังเกตพฤติกรรมของหุ่นยนต์โดยถามคำถามดังต่อไปนี้:
- คุณช่วยแสดงให้ฉันเห็นโดยใช้มือของคุณได้ไหมว่าคุณคิดว่าหุ่นยนต์ Code Base จะเคลื่อนที่ได้ไกลแค่ไหนก่อนที่คุณจะรันโครงการ?
- คุณเปลี่ยนพารามิเตอร์ระยะทางเป็นอะไร และทำไม? คุณคิดว่าหุ่นยนต์ Code Base จะเดินทางได้ไกลแค่ไหนเมื่อระยะทางเปลี่ยนไป?
- เมื่อคุณเพิ่มบล็อก [ขับไป] อีกอัน คุณได้ตั้งค่าให้เดินทางในระยะทางเท่ากันหรือไม่ มันต้องเป็นอันเดียวกันมั้ย? ทำไมหรือทำไมไม่?
- หากหุ่นยนต์ Code Base ของฉันถูกเขียนโค้ดให้ขับไปข้างหน้า 100 มม. ฉันจะต้องเปลี่ยนระยะทางเท่าใด หากต้องการให้มันขับไปได้ไกลเป็นสองเท่า
พูดคุยเรื่องการเคลื่อนไหวของหุ่นยนต์ Code Base - เตือนเตือนนักเรียนอาจมีคำถามเมื่อทำการแก้ไขและเริ่มต้นโครงการ เตือนนักเรียนว่าการเรียนรู้แนวคิดใหม่ๆ อาจต้องลองหลายครั้ง และสนับสนุนให้พวกเขาลองอีกครั้งหากไม่สำเร็จในการเพิ่มและแก้ไขบล็อกในโครงการ
- ถามขอให้เด็กนักเรียนคิดว่าหุ่นยนต์ Code Base จะต้องเคลื่อนที่อย่างไร หากต้องการให้มันขับไปที่ประตูทางเข้า แล้วขับกลับไปยังจุดที่เริ่มต้น หุ่นยนต์ Code Base สามารถทำภารกิจหรืองานประเภทใดได้บ้างที่สามารถเคลื่อนที่ไปข้างหน้าและถอยหลังได้ ขอให้เด็กนักเรียนเสนอแนะงานที่หุ่นยนต์ Code Base สามารถทำได้โดยใช้การเคลื่อนที่ไปข้างหน้าและข้างหลัง
ทางเลือก: กลุ่มอาจถอดประกอบหุ่นยนต์ฐานโค้ดหากจำเป็นในจุดนี้ของประสบการณ์ พวกเขาจะใช้รุ่นเดียวกันในห้องปฏิบัติการถัดไป ดังนั้นนี่จึงเป็นตัวเลือกของครู