
Oynamak
Bölüm 1 - Adım Adım
- TalimatÖğrencilere, Kod Tabanlı robotlarını nasıl ileriye taşıyacaklarını keşfedeceklerini öğretin! Projeye başlamadan önce, Kod Tabanı robotunun nerede sonlanacağını tahmin edecekler. Aşağıdaki animasyonu izleyerek Kod Tabanının farklı mesafelerde nasıl ilerlediğini görebilirsiniz. Animasyonda Kod Tabanı, Tile'ın sol alt köşesinden başlıyor ve önce 150mm ileri giderek duruyor. Daha sonra başlangıç noktasına geri döner ve 75 mm ileri giderek durur.
Video dosyası
- ModelVEXcode GO'yu bir cihazda nasıl başlatacağınızı ve [Drive for] bloğuyla Kod Tabanını ileriye taşıyan bir proje nasıl oluşturacağınızı gösteren model.
- Öğrencilere VEX Kütüphanesi makalesinin Açma ve Kaydetme adımlarını modelleyin veaçma ve kaydetme adımlarını izlemelerini sağlayın.
- Öğrencilere projelerine İleriadını vermelerini söyleyin.
- Have the students then connect the Brain of their Code Base robot to their device.
- Öğrenciler projelerine isim verdikten ve Brain'i cihazlarına bağladıktan sonra, Kod Tabanı robotunu yapılandırmak için adımları izlemeleri gerekiyor. Kod Tabanını Yapılandırma VEX Kütüphanesi makalesindeki adımları modelleyin ve öğrencilerin Araç Kutusu'nda Aktarma Organları bloklarını görebildiğinden emin olun.
-
[Drive for] bloğunun Çalışma Alanına nasıl sürükleneceğini ve {When started} bloğunun altına nasıl yerleştirileceğini gösterin.
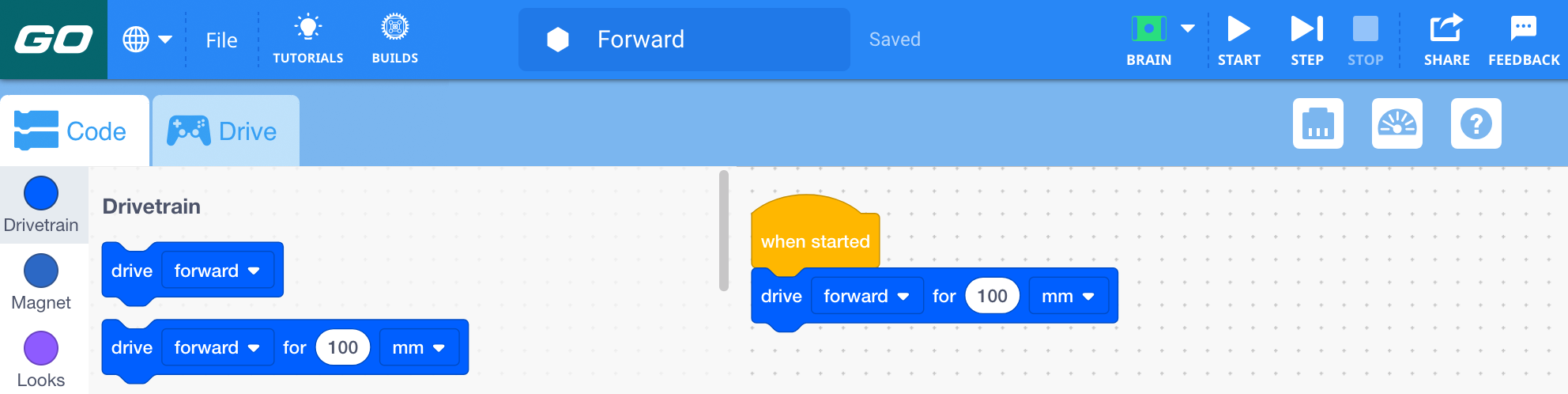
[Drive for] bloğunu ekle -
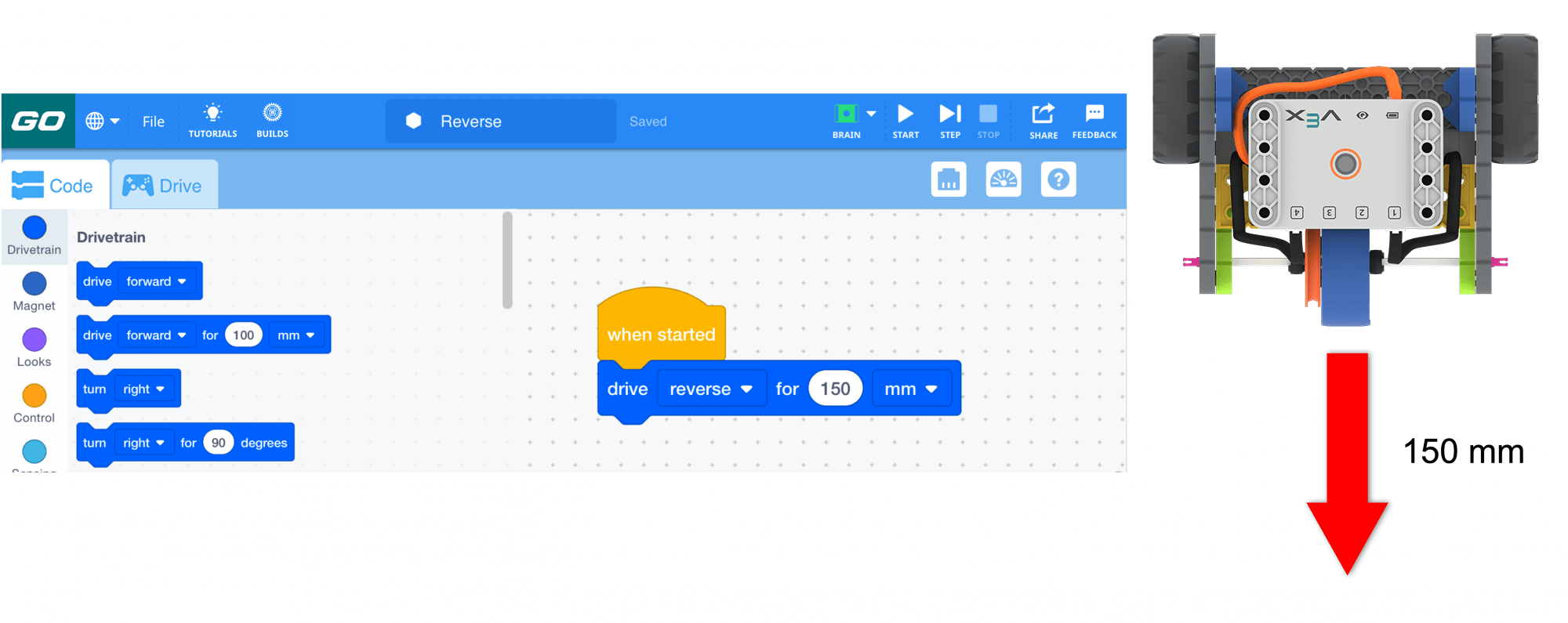
[Drive for] bloğunun parametresini 150mm olarak değiştirin.
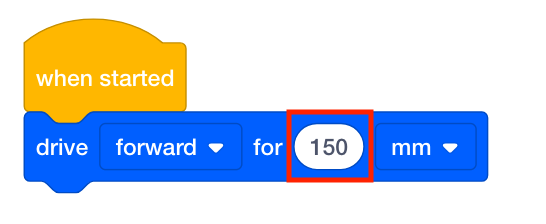
Parametreyi değiştir - Öğrencilere, [Drive for] bloğundaki parametrelere dayanarak Kod Tabanı robotunun ne kadar hareket edeceğini tahmin etme konusunda model olun. Öğrencilerin Kod Tabanını başlangıç pozisyonuna yerleştirmelerini sağlayın, ardından robotun ne kadar hareket edeceğini tahmin edin. Kod Tabanının duracağını düşündükleri yere bir işaret koymalılar.
-
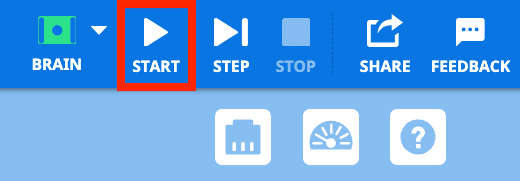
Öğrencilere projeyi başlatmak için Araç Çubuğu'ndaki 'Başlat' düğmesinin nasıl seçileceğini gösteren bir model.
- Öğrenciler davranışı gözlemledikten sonra, öğrencilere projelerine nasıl geri döneceklerini, [Drive for] bloğunun parametrelerini 150 mm'den 200 mm veya 250 mm gibi başka bir mesafeye nasıl düzenleyeceklerini modelleyin. Daha sonra projeyi tekrar başlatarak parametrelerdeki değişikliğin Kod Tabanı robotunun hareketini nasıl etkilediğini görün.
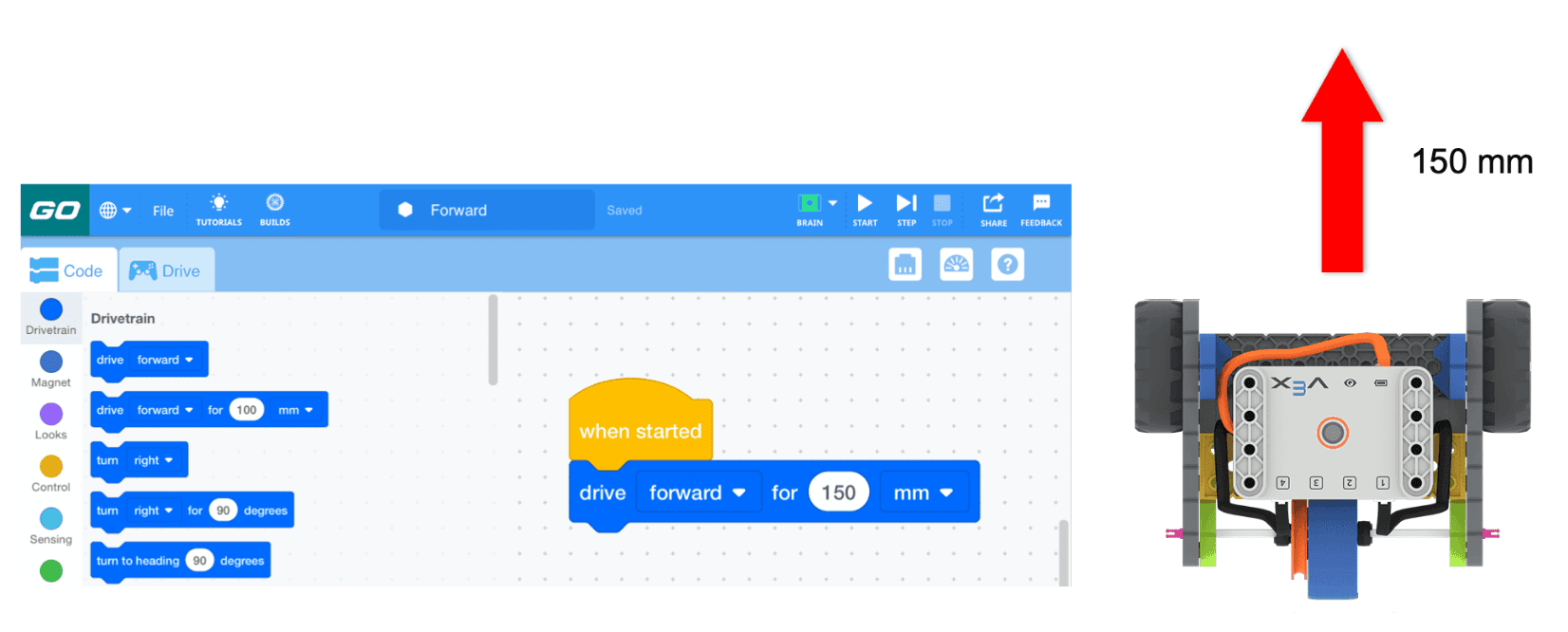
İleri 150 mm - KolaylaştırmaAşağıdaki soruları sorarak öğrenci gözlemleri ve projenin hedefleri etrafında bir tartışmayı kolaylaştırın:
- Projeye başlamadan önce Code Base robotunun ne kadar hareket edebileceğini ellerinizi kullanarak bana gösterebilir misiniz?
- Mesafe parametresini neye değiştirdiniz ve neden? Mesafe değiştirildiğine göre Code Base robotunun ne kadar yol kat edebileceğini düşünüyorsunuz?
- Kat edilen mesafe tahmininizle karşılaştırıldığında nasıldı?
- Bu projede hangi blok kategorisini kullandınız?

Kod Tabanlı Robotun Hareketini Tartışın - HatırlatÖğrencilere projelerini oluştururken ve başlatırken soruları olabileceğini hatırlatın. Öğrencilere yeni kavramları öğrenmenin birden fazla deneme gerektirebileceğini hatırlatın ve ilk denemede başarısız olmaları durumunda tekrar denemeleri konusunda onları teşvik edin.
- SoruÖğrencilerden, Code Base robotunun sınıf içinde seyahat edebilmesi için ne kadar uzağa gitmesi gerektiğini düşünmelerini isteyin. Öğrencilerin bu tür planlamanın günlük hayatta neden yararlı olduğunu anlamalarını sağlayın. Öğrencilere planlama ve doğru yönlendirme yapabilmenin bir iş için nasıl faydalı olabileceğini sorun? Öğrencilere, yönlendirme gerektiren herhangi bir iş düşünüp düşünmediklerini sorun.
Oyun Arası & Grup Tartışması
Her grup tamamladıktan sonra, bir sohbet için bir araya gelin.
- Code Base robotu düşündüğünüz yere ulaştı mı? Değilse, tahmininize ne kadar yakındı?
- Projenizi nasıl düzenlediniz? Hangi yeni mesafeyi seçtiniz?
- [Drive for] bloğunda mesafeyi değiştirirken herhangi bir zorlukla karşılaştınız mı?
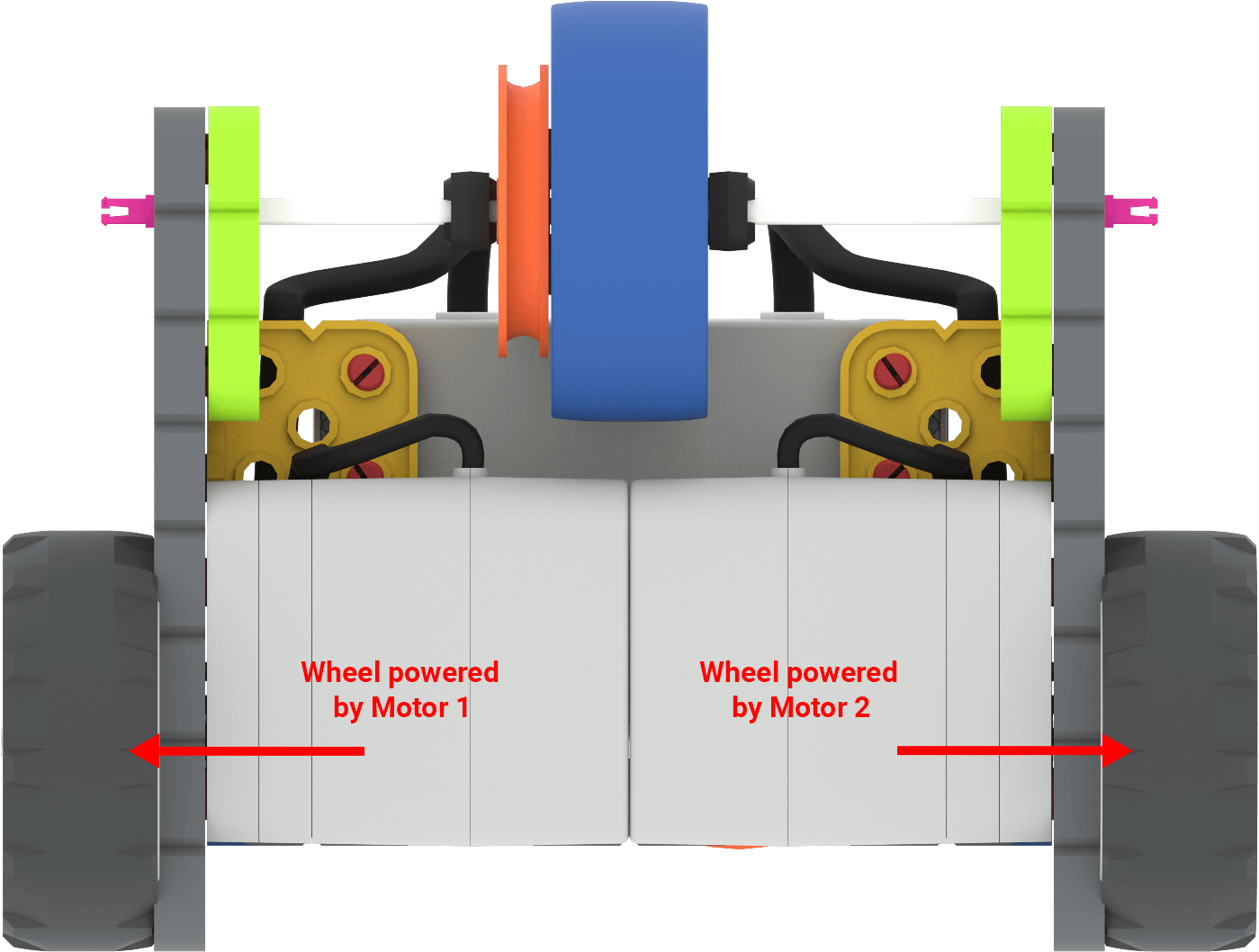
Aktarma Organlarını Tanıtın:
- VEXcode GO'nun Kod Tabanı robotumuzu ileriye doğru hareket ettirmek için nasıl kullanılacağını incelediğimize göre, blokların bir "Aktarma Organları" bölümünün neden olduğunu düşünüyorsunuz?
- Aktarma organlarının ne olduğunu düşünüyorsunuz? Düşüncenizi açıklayabilir misiniz?
- Code Base robotunda aktarma organlarının nerede olduğunu hareketlerle gösterebilir misiniz?
- Code Base robotunuzun altına bakıp motorların bu aktarma organında nerede olduğunu ve hangi tekerleklere bağlı olduklarını belirleyebilir misiniz?
Bölüm 2 - Adım Adım
- TalimatÖğrencilere, Kod Tabanlı robotlarını ileri ve geri nasıl hareket ettireceklerini keşfetmelerini söyleyin!
Başlamak için her grubun bir cihazı, VEXcode GO, en az bir yerleştirme işaretleyicisi ve oluşturulmuş bir Kod Tabanı olmalıdır. Aşağıdaki animasyonu izleyerek Kod Tabanının nasıl ters yönde hareket ettiğini görebilirsiniz. Animasyonda, Kod Tabanı kutucuğun sol üst köşesinden başlıyor ve 150 mm geriye doğru gidiyor, sonra duruyor. Daha sonra başlangıç pozisyonuna döner ve 75 mm geri yönde hareket eder.
Video dosyası - ModelÖğrencilere yönelik VEXcode GO'yu bir cihazda nasıl başlatacaklarını ve projelerinin adını Tersine nasıl değiştireceklerini gösteren model. Öğrencilere bu projeyi ilk projelerinden ayrı olarak kaydetmek için 'Farklı Kaydet' seçeneğini seçmelerini gösterin.
Daha fazla bilgi için Projeyi Açma ve Kaydetmemakalesindeki adımlara bakın.
-
[Drive for] bloğundaki parametrenin, Kod Tabanı sürücüsünün tersine çevrilmesi için nasıl değiştirileceğini modelleyin.
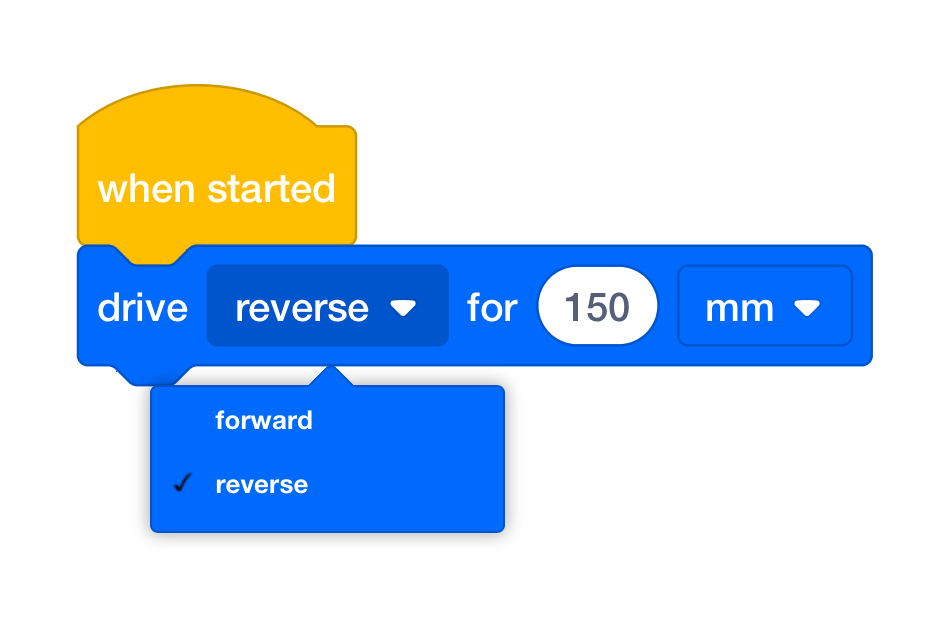
Parametreyi değiştir (tersine) - Oyun Bölümü 1'deki tahmin sürecini kullanın. Öğrencilerin Kod Tabanını başlangıç pozisyonuna yerleştirmelerini sağlayın, ardından robotun ne kadar hareket edeceğini tahmin edin. Kod Tabanının duracağını düşündükleri yere bir işaret koymalılar.
-
Öğrencilerin projelerine başlamalarını sağlayın. You may need to remind them of the steps to Connect a VEX GO Brain if connection issues occur.
Ters 150mm - Öğrenciler geri sürüş davranışını gözlemledikten sonra, öğrencilere projelerine nasıl geri dönecekleri konusunda model olun. Daha sonra projelerinin adınıİleri ve Geriolarak değiştirmeleri gerekir. Daha fazla bilgi için VEX Kütüphanesini Açma ve Kaydetmemakalesindeki adımlara bakın.
-
Öğrencilere ikinci bir [Drive for] bloğunun nasıl ekleneceğini gösteren model. Bir [Drive for] bloğunda robot ileri doğru hareket etmeli, ikincisinde ise robot geri doğru hareket etmeli. [Drive for] bloklarının parametrelerinin nasıl düzenleneceğini modelleyin ve ardından parametre değişikliğinin Kod Tabanı robotunun hareketini nasıl etkilediğini görmek için projeyi tekrar başlatın.
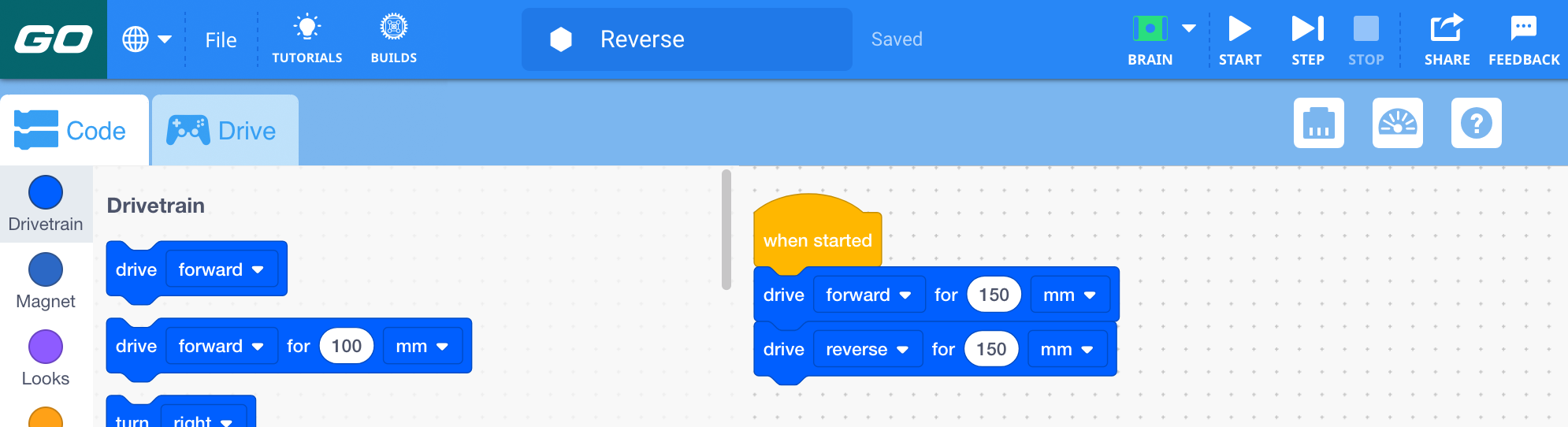
İleri ve Geri
-
- KolaylaştırmaÖğrenciler projelerini düzenlerken ve robotun davranışını gözlemlerken aşağıdaki soruları sorarak bir tartışmayı kolaylaştırın:
- Projeyi çalıştırmadan önce Code Base robotunun ne kadar hareket edebileceğini ellerinizi kullanarak gösterebilir misiniz?
- Mesafe parametresini neye değiştirdiniz ve neden? Mesafe değiştirildiğine göre Code Base robotunun ne kadar yol kat edebileceğini düşünüyorsunuz?
- Başka bir [Drive for] bloğu eklediğinizde, bunların aynı mesafeyi kat etmesini mi ayarladınız? Aynı olmaları mı gerekiyor? Neden veya neden olmasın?
- Code Base robotum 100 mm ileri gidecek şekilde kodlanmışsa, iki kat daha uzağa gitmesini istersem mesafeyi ne kadar değiştirmem gerekir?
Kod Tabanlı Robotun Hareketini Tartışın - HatırlatÖğrencilerin projelerini düzenlerken ve başlatırken soruları olabileceğini hatırlatın. Öğrencilere yeni kavramları öğrenmenin birden fazla deneme gerektirebileceğini hatırlatın ve projeye blok ekleme ve düzenleme konusunda başarısız olurlarsa tekrar denemeleri konusunda onları teşvik edin.
- SoruÖğrencilerden, Kod Tabanı robotunun kapıya kadar gidip ardından başladığı yere geri dönmesini istiyorlarsa nasıl hareket etmesi gerektiğini düşünmelerini isteyin. Kod Tabanlı robot artık ileri ve geri hareket edebildiğinden hangi tür görevleri veya işleri gerçekleştirebilir? Öğrencilerden, Kod Tabanı robotunun ileri ve geri hareketlerini kullanarak tamamlayabileceği bir görev önermelerini isteyin.
İsteğe bağlı: Gruplar, deneyimin bu noktasında ihtiyaç duymaları halinde Kod Tabanı robotlarını parçalara ayırabilirler. Sonraki laboratuvarlarda aynı yapıyı kullanacaklar, dolayısıyla bu bir öğretmen seçeneğidir.