배경
도구는 업무를 완수하고 문제를 해결하는 데 도움이 되도록 사람들이 매일 사용합니다. 이 수직선: 덧셈 단위는 여러분과 학생들에게 덧셈 방정식을 푸는 데 도움이 되는 특정 도구를 익힐 것입니다. 학생들이 사용할 도구에는 123 로봇, 수직선 및 조작 도구가 포함됩니다. 또한 학생들은 방정식을 풀기 위해 123 로봇을 수직선으로 효과적으로 움직이는 방법을 배웁니다.
번호선
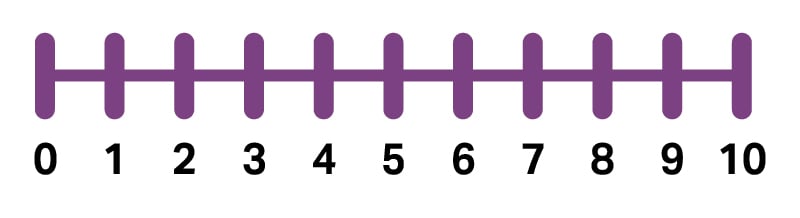
수직선은 특정 간격으로 표시되거나 특정 순서로 배치된 숫자와 동일한 공백으로 표시된 숫자 줄입니다. 숫자는 0에서 긍정적으로 상승하고 0에서 부정적으로 하강합니다. 숫자를 더하고 빼는 데 유용한 도구입니다. 또한, 수직선은 학생들이 문제를 해결하면서 숫자를 시각화하는 데 도움이 됩니다. 수직선은 또한 일대일 대응을 나타내는 데 도움이 됩니다. 일대일 대응은 하나의 개체를 하나의 (대응하는 ) 숫자 또는 개체와 일치시키는 능력입니다. 학생들은 수직선에서 123 로봇의 한 움직임이 방정식에서 더해지는 1번과 같다는 것을 알게 될 것입니다.
카운팅 전략
학생들은 덧셈과 뺄셈을 배우기 시작할 때 다양한 계산 전략을 사용합니다. 이 사실은 1 학년을 위한 다음 공통 핵심 수학 표준에 포착됩니다: 계산을 덧셈과 뺄셈에 관련시키기 (예: 2를 더하기 위해 2를 계산). 이 표준은 이 STEM 실험실의 주요 초점입니다. 모두 계산하기, 계산하기, 계산하기 등 덧셈과 뺄셈 모두에 대한 다양한 계산 전략이 있습니다.
학생들이 모든 계산 전략을 사용할 때 (덧셈과 뺄셈의 경우), 1로 시작하여 세어 총 객체 수를 찾습니다. 예를 들어, 7 + 2, 학생은 1부터 세기 시작하고, 최대 7까지 세고, 1, 2, 3, 4, 5, 6, 7... 8, 9.
학생들이 사용할 수있는 또 다른 전략은 전략 (덧셈) 에 대한 기대입니다. 학생들은 1에서 시작하지 않고 시작 번호에서 계산합니다. 예를 들어, 7 + 2, 학생들은 7... 8, 9에서 시작합니다. 그러나 전략에 대한 계산 (빼기) 을 사용하여 학생들은 빼기 수로 시작하여 총계에 도달하기 위해 의지합니다. 예를 들어, 12-5, 학생은 5로 시작하여 5... 6, 7, 8, 9, 10, 11, 12까지 1씩 12까지 계산합니다. 위에서 언급한
마지막 전략은 학생들이 뺄셈 문제를 풀 때 발생합니다. 카운팅 백 전략을 사용하는 학생들은 총계로 시작한 다음 빼는 숫자를 다시 계산합니다. 예를 들어, 12-5, 학생들은 5로 시작하여 12까지 1, 5... 6, 7, 8, 9, 10, 11, 12까지 세게 됩니다.
학생들과 함께 문제를 해결하는 연습을 할 때, 이중 계산에 관한 학생들의 일반적인 오해에 유의하십시오. 예를 들어, 학생이 3 + 5를 더하는 경우 3에서 시작하여 3에서 계산하고 8의 정답으로 끝나는 대신 7의 답으로 끝날 수 있습니다.
학생들이 손가락을 사용하여 덧셈과 뺄셈 방정식을 계산하거나 해결하는 데 도움이되는 것은 매우 널리 퍼져 있습니다. 학생들이 다른 계수 전략을 이해하고 사용할 때, 학생들은 덧셈과 뺄셈 방정식을 풀 때 손가락을 사용하는 것을 가볍게 삼가야 합니다. 학생들이 계산 전략에 대한 이해를 개발할 때 연습을 지원하고 제공하는 것은 미래의 학습에서보다 정교한 전략에 대한 연결을 만드는 것이 좋습니다.
조작
조작은 개념을 표현하기 위해 실습 학습 경험에 사용되는 물리적 개체입니다. 이 장치에서 크레용은 제안된 조작입니다. 수학 방정식을 풀 때 조작법은 학생들이 함께 더하는 숫자를 시각화할 수 있기 때문에 학생들에게 도움이 됩니다. 조작은 또한 학생들이 덧셈과 뺄셈을 연관 지을 수 있도록 지원합니다. 학생들은 활동 중에 더하기 문제의 합계와 동일한 수를 계산하기 위해 조작을 계산해야 합니다. 이것은 학생들이 자신의 작업을 확인하여 조작물이 실험실 2 플레이 파트 1 및 플레이 파트 2에서 학생들이 할 수 있는 방정식과 일치하는지 확인하는 좋은 방법입니다.
일대일 서신
일반적으로 하나의 개체를 하나의 (해당) 숫자 또는 개체에 일치시키는 기능으로 설명됩니다.
-
예: 123 로봇의 버튼 1개 누르기 = 1 무브먼트
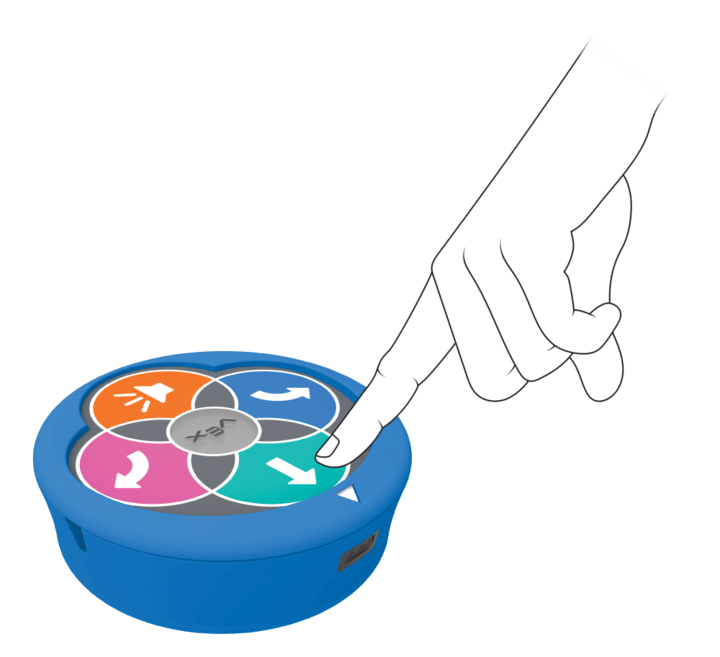
버튼1개 누르기 
1 로봇 이동
알고리즘
알고리즘은 특정 문제를 해결하거나 작업을 수행하기 위해 만들어진 잘 정의된 지침의 목록입니다. 알고리즘은 일반적으로 컴퓨터로 구현할 수 있는 지침을 참조하지만, 양치질 방법에 대한 다른 지침이나 제트 스키 작동과 같은 더 복잡한 작업을 포함할 수 있습니다.
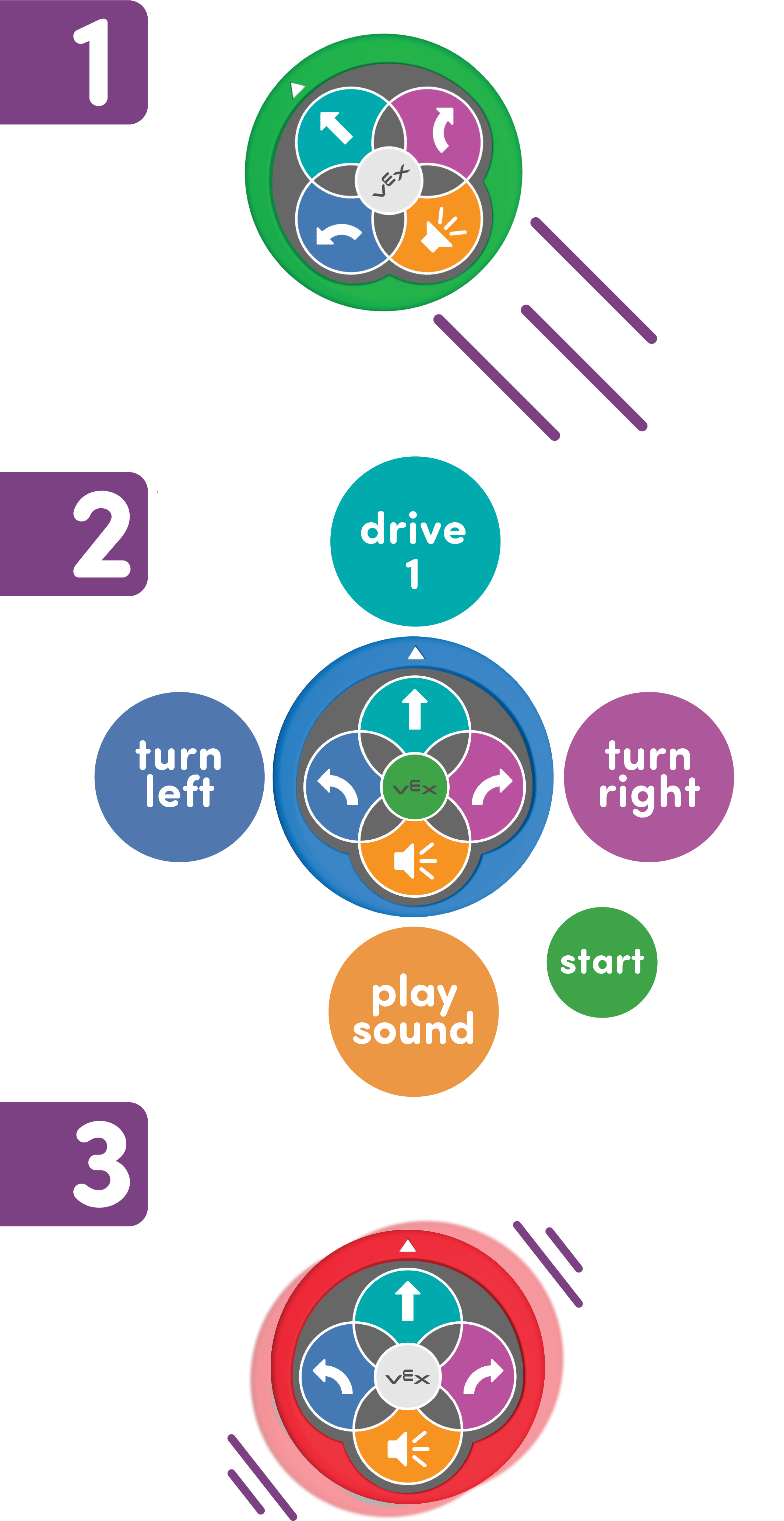
이 단원 동안 학생들은 123 로봇을 작동하기 위해 특정 순서로 일련의 지침을 따릅니다. 123 로봇 사용 방법에 대한 자세한 내용은 VEX 123 로봇 VEX 라이브러리 사용 문서를 참조하십시오. 터치 버튼을 사용하여 123 로봇을 코딩하는 방법에 대한 자세한 내용은 123 로봇 VEX 라이브러리 문서의 터치 버튼으로 코딩 을 참조하십시오.
123 로봇을 이동하는 알고리즘은 다음과 같습니다.
- 밀어서 깨우기
- 터치하여 코드 입력
- 흔들어서 지우기