
Oefening
In het vorige gedeelte hebt u geleerd hoe u het Driver Control-programma in het robotbrein kunt aanpassen. Nu gaat u toepassen wat u hebt geleerd om uw Clawbot de oefenactiviteit 'Besturen en verzamelen' te laten voltooien.
Bij deze activiteit bestuurt u uw robot zodat deze een ring oppakt en scoort op het kleine paaltje. Hiervoor gebruikt u het Driver Control-programma op de Brain. U gaat iteraties doorvoeren in uw aandrijfconfiguraties, zodat u uw robot gemakkelijker een ring kunt laten oppakken en scoren.
Bekijk de onderstaande video om te zien hoe u kunt toepassen wat u hebt geleerd om de oefenactiviteit Controleren en verzamelen uit te voeren.
Nu is het jouw beurt om de oefenactiviteit 'Beheer en verzamel' uit te voeren!
Deze animatie laat een mogelijke manier zien waarop je robot kan bewegen om een ring te verzamelen en te scoren om de oefening 'Besturen en verzamelen' te voltooien.
In de onderstaande video bevindt de Clawbot zich aan de linkerkant van het veld. Er is één ring op het veld, die zich bovenaan het veld bevindt, tussen de tweede en derde tegel, en nog een onderaan het veld. Er staat een enkele paal in het midden van het veld, aan de rechterkant. De Clawbot rijdt naar de tweede en derde tegel en beweegt zich vervolgens omhoog naar de eerste ring, waar hij de Clawbot oppakt. Dan heft het zijn klauw op en loopt achteruit. Vervolgens rijdt de machine naar de paal en laat de klauw los, zodat de ring op de paal valt.
Gebruik dit document als referentie om de oefenactiviteit te voltooien. Google / .docx / .pdf
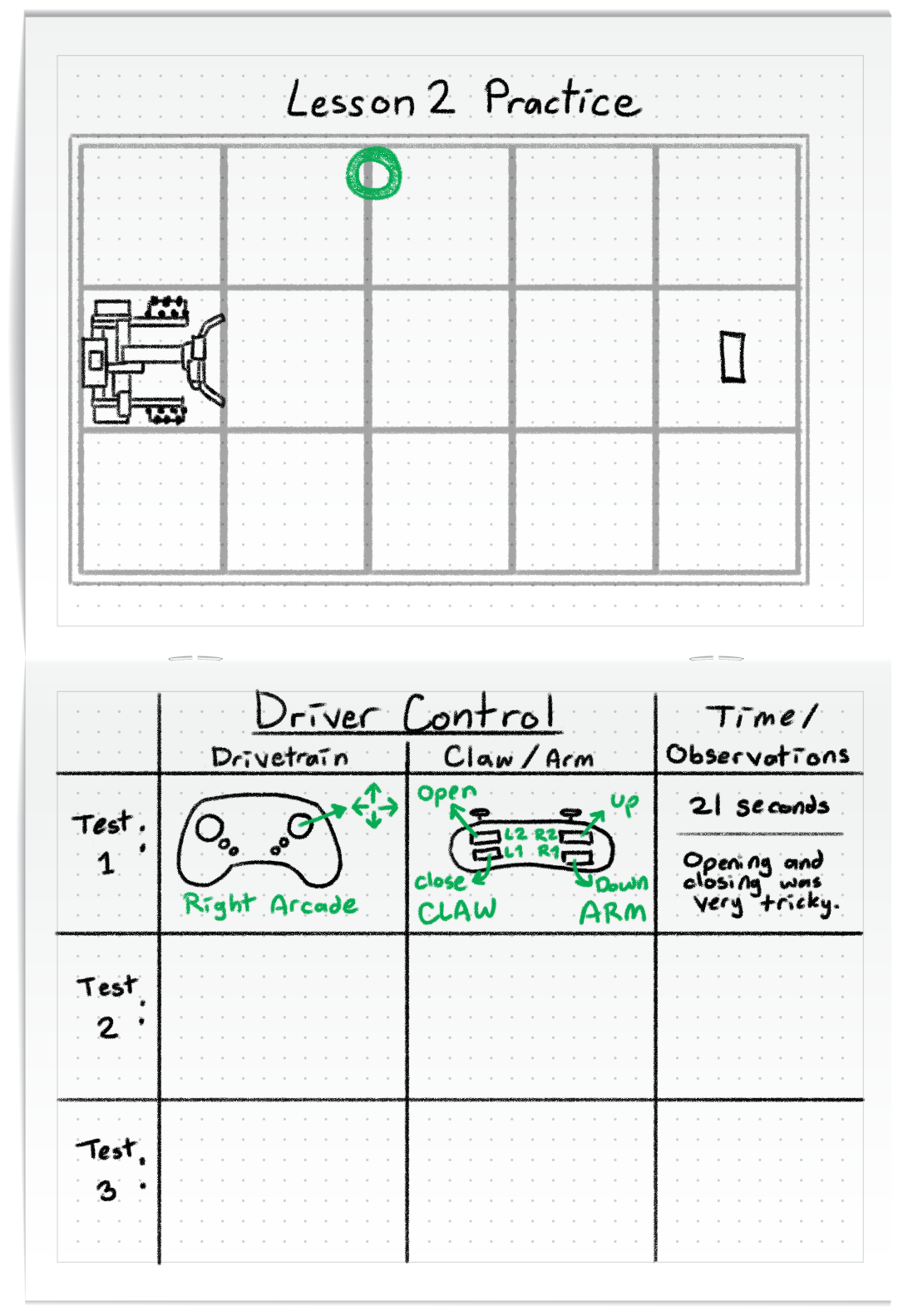
Terwijl u de oefening Controleren en verzamelen uitvoert, documenteert u de wijzigingen in de driver control en uw technische notitieboekje.
- Welke controllerconfiguraties heb je gebruikt voor het aansturen en besturen van de arm en de klauw?
- Hoe goed kon u de arm en de klauw gebruiken om de ring bij elke configuratie op te pakken en op de paal te plaatsen?
- Hoe lang duurde het voordat de robot bij elke test de ring naar het doel had verplaatst?
Zie de afbeelding links voor een voorbeeld van hoe u uw ontwerpideeën en tests kunt vastleggen.
Bereid je voor op de uitdaging
In Compete (op de volgende pagina) ga je met je robot twee ringen scoren op de kleine paal van het veld in de Speed Claw Challenge. De snelste tijd wint! Leer hoe je aan de uitdaging kunt deelnemen, controleer je begrip en oefen vervolgens voor de uitdaging.
Het doel van deze uitdaging is om zo snel mogelijk beide ringen op de kleine paal op het veld te pakken en te scoren.
In de onderstaande video bevindt de Clawbot zich aan de linkerkant van het veld. Er zijn twee ringen op het veld: één bovenaan het veld, tussen de tweede en derde tegel, en één onderaan het veld, ook tussen de tweede en derde tegel. Er staat een enkele paal in het midden van het veld, aan de rechterkant. De video begint met een aftelling: 3, 2, 1. De Clawbot rijdt naar de tweede en derde tegel en beweegt zich vervolgens omhoog naar de eerste ring, waar hij de Clawbot oppakt. Dan heft het zijn klauw op en loopt achteruit. Vervolgens rijdt de machine naar de paal en laat de klauw los, zodat de ring op de paal valt. Daarna gaat de Clawbot achteruit en laat de klauw zakken. Vervolgens rijdt hij naar de tweede ring onderaan het veld, pakt hem op, draait zich om en rijdt naar de paal. De Clawbot laat de klauw los, waardoor de ring op de paal valt. De timer stopt op dit punt, aangezien de uitdaging voltooid is en 21,22 seconden aangeeft.
Volg de stappen in dit document om meer te leren over hoe u deze uitdaging kunt voltooien.
Google / .docx / .pdf
Controleer uw begrip
Voordat u aan de uitdaging begint, moet u ervoor zorgen dat u de regels en de opzet van de uitdaging begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen Google / .docx / .pdf
Nadat u de vragen hebt beantwoord, kunt u de uitdaging oefenen.
Selecteer Volgende > om deel te nemen aan de Snelheid en Score Uitdaging.