
Pratik
Geçtiğimiz bölümde robotunuzu sürmek için otonom ve Sürücü Kontrol programlarını kullanmayı öğrendiniz. Ayrıca EXP Brain'deki farklı slotlara birden fazla projeyi nasıl indireceğinizi ve bunun ne kadar faydalı olabileceğini öğrendiniz. Şimdi öğrendiklerinizi Puanlama Becerileri uygulama etkinliğini tamamlamak için uygulayacaksınız.
Bu etkinliğin amacı robotunuzun iki adet 30 saniyelik turda orta direk üzerinde iki halka yapmasıdır: biri sürücü kontrollü, diğeri otonom. Öğrendiklerinizi Puanlama Becerileri uygulama etkinliğini tamamlamak için nasıl uygulayabileceğinizi görmek için aşağıdaki videoyu izleyin.
Şimdi Puanlama Becerileri alıştırma etkinliğini tamamlama sırası sizde!
Bu animasyonda robot ilk önce 30 saniye içerisinde orta direkte bulunan iki yüzüğü otonom olarak toplayıp puanlıyor. Daha sonra robotun 30 saniyede iki halkayı da tamamladığı sürücü kontrol çalışması gösteriliyor. Robotunuzun Puanlama Becerileri alıştırma etkinliğini tamamlamak için izleyebileceği olası yolu görmek için bu animasyonu izleyin.
Aşağıdaki videoda Clawbot, sahanın sol tarafında, Saha Karosu'nun ortasına bağlı orta büyüklükteki bir direğe bakıyor ve robottan dört sıra uzakta, sağ duvara yakın bir yerde bulunuyor. Sahada iki Yüzük var. Birincisi, ikinci ve üçüncü fayanslar arasında üstteki Saha Duvarına dayanır ve ikincisi ise birincisinin tam karşısında, alttaki Saha duvarına dayanır. Saha'nın üzerinde 30 saniyeye ayarlanmış bir kronometre ve bunun meydan okumanın otonom kısmı olduğunu gösteren bir Beyin simgesi bulunmaktadır. Video, üçten geri sayımla başlıyor ve Pençebot, birer birer Yüzükleri alıp direğe yerleştiriyor. Kronometre durur ve 13:24'ü gösterir. Daha sonra ikon Kontrolcüye dönüşür ve kronometre sıfırlanır, bu da sürücünün kontrol çalışmasını gösterir. Clawbot, saatte 6:04 saniye kala iki yüzüğü alıp direğe yerleştirmek için harekete geçiyor.
Bu etkinliği tamamlamak için bu belgedeki adımları izleyin. Google / .docx / .pdf
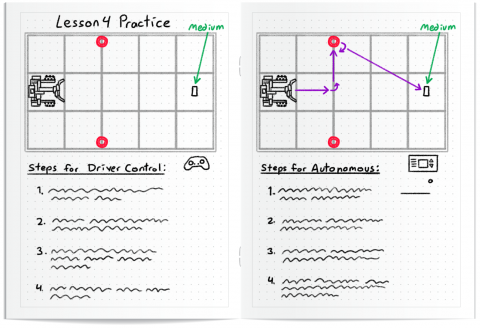
Puanlama Becerileri uygulama etkinliğini tamamladığınızda bulgularınızı mühendislik not defterinize yazın.
- Robotunuzun her denemeyi nasıl tamamlaması gerektiğini gösteren bir resim çizin.
- Her iki çalışma için (sürücü kontrolü ve otonom) aktiviteyi tamamlamak için gereken adımları listeleyin.
- Projenizi çalıştırırken, kodu veya sürücü kontrol stratejinizi nasıl geliştirebileceğinize dair notlar alın.
- Her yinelemeden sonra yaptığınız değişiklikleri belgelendirin.
Sonuçlarınızı nasıl kaydedebileceğinize dair bir örnek için bu görseli inceleyin.
Meydan Okumaya Hazırlanın
Yarış'ta (bir sonraki sayfada), Bölünmüş Karar Mücadelesi'nde iki adet 30 saniyelik koşudan oluşan bir maç oynayarak (biri otonom, diğeri sürücü kontrolü kullanılarak) orta direk üzerindeki Yüzükleri olabildiğince hızlı bir şekilde yakalayacak, hareket ettirecek ve puan kazanacaksınız. Split Decision Challenge'da nasıl yarışacağınızı öğrenmek için aşağıdaki belgeye ve animasyona bakın. Daha sonra Anladığınızı Kontrol Edin Sorularını tamamlayın ve meydan okumaya hazırlanın.
Bu mücadelenin amacı, iki turda (biri otonom kodlama, diğeri sürücü kontrolü kullanılarak) en hızlı sürede orta boy bir direkte dört halkayı yakalamak, hareket ettirmek ve puan kazanmaktır.
Aşağıdaki videoda Clawbot sahanın sol tarafında yer alıyor. Sahada dört Yüzük var. Sahanın en üst kısmına yakın, birincisi ikinci ve üçüncü taşların arasında, ikincisi üçüncü ve dördüncü taşların arasında. Sahanın en altına yakın, ikinci ve üçüncü taşların arasında üçüncü, üçüncü ve dördüncü taşların arasında dördüncü. Sahanın ortasında, sağ tarafa doğru tek bir direk var. Video geri sayımla başlıyor: 3, 2, 1. Pençebot ikinci ve üçüncü karelere doğru ilerler ve ardından ilk Yüzüğü alarak ona doğru hareket eder. Daha sonra geri çekilir ve pençesini kaldırır. Daha sonra direğe doğru ilerler ve pençeyi serbest bırakarak Yüzüğün direğe düşmesini sağlar. Daha sonra videoda, dört Yüzük'ten üçünün direğin yerinde olduğu bir kesit yer alıyor. Pençebot geri çekilip pençesini indirdi ve dördüncü Yüzüğü aldı. Daha sonra sürücü kontrol çalışmasına geçildi. Video geri sayımla başlıyor: 3, 2, 1. Pençebot ikinci ve üçüncü karelere doğru ilerler ve ardından ilk Yüzüğü alarak ona doğru hareket eder. Daha sonra geri çekilir ve pençesini kaldırır. Daha sonra direğe doğru ilerler ve pençeyi serbest bırakarak Yüzüğün direğe düşmesini sağlar. Daha sonra videoda, dört Yüzük'ten üçünün direğin yerinde olduğu bir kesit yer alıyor. Pençebot geri çekilip pençesini indirdi ve ikinci Yüzüğü almaya çalıştı ancak zaman doldu. Final skoru Otonom Puanı 9 ve Sürücü Kontrol Puanı 9 olup toplam puan 18'dir.
Bu, bir robotun Bölünmüş Karar meydan okuma etkinliğinde nasıl performans gösterebileceğine dair sadece bir örnektir.
Bu etkinliğin nasıl tamamlanacağı hakkında daha fazla bilgi edinmek için bu belgedeki adımları izleyin. Google / .docx / .pdf
Anlayışınızı Kontrol Edin
Yarışmaya başlamadan önce, aşağıdaki belgede yer alan soruları mühendislik not defterinize yanıtlayarak yarışmanın kurallarını ve kurulumunu anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları Google / .docx / .pdf
Soruları tamamladıktan sonra, soruyu çözmeye çalışın.
Bölünmüş Karar yarışmasında yarışmak için Sonraki > seçin.