
Pratica
Nell'ultima sezione hai imparato usare programmi autonomi e di controllo del conducente per guidare il tuo robot. Hai anche imparato come scaricare più progetti in slot diversi sull'EXP Brain e quanto questa cosa possa essere utile. Adesso metterai in pratica quanto hai imparato per completare l'attività pratica sulle abilità di punteggio.
L'obiettivo di questa attività è che il tuo robot segni due anelli su un palo di medie dimensioni in due sessioni da 30 secondi: una controllata dal conducente e una autonoma. Guarda il video qui sotto per vedere come puoi applicare ciò che hai imparato per completare l'attività pratica sulle abilità di punteggio.
Adesso tocca a te completare l'attività pratica sulle abilità di punteggio!
In questa animazione, il robot prima raccoglie e segna autonomamente due anelli sul palo medio in 30 secondi. Quindi, mostra la corsa di controllo del conducente in cui il robot segna entrambi gli anelli in 30 secondi. Guarda questa animazione per vedere un possibile percorso che il tuo robot potrebbe seguire per completare l'attività pratica sulle abilità di punteggio.
Nel video qui sotto, il Clawbot si trova sul lato sinistro del campo, di fronte a un palo di medie dimensioni fissato al centro del riquadro del campo, a quattro file di distanza dal robot, vicino al muro di destra. Ci sono due Anelli sul campo. La prima è contro il muro di campo superiore, tra la seconda e la terza piastrella, mentre la seconda è direttamente di fronte alla prima, contro il muro di campo inferiore. Sopra il Campo c'è un cronometro impostato su 30 secondi, insieme all'icona del Cervello che indica che questa è la parte autonoma della sfida. Il video inizia con un conto alla rovescia da tre, dopodiché il Clawbot si muove per raccogliere un anello alla volta e posizionarli sul palo. Il cronometro si ferma e segna , ovvero 13:24. L'icona si trasforma quindi in un Controller e il cronometro si azzera, a indicare che è stato eseguito un controllo da parte del conducente. Il Clawbot si lancia in azione per raccogliere e posizionare entrambi gli anelli sul palo quando mancano 6:04 secondi al termine del cronometro.
Segui i passaggi indicati in questo documento per completare questa attività. Google / .docx / .pdf
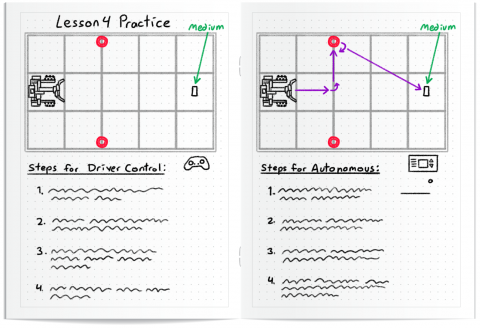
Una volta completata l'attività pratica sulle competenze di valutazione, documenta i risultati nel tuo quaderno di progettazione.
- Disegna un'immagine per mostrare come il tuo robot dovrebbe muoversi per completare ogni prova.
- Elencare i passaggi necessari per completare l'attività per entrambe le corse: controllo del conducente e guida autonoma.
- Mentre esegui il progetto, prendi appunti su come potresti migliorare il codice o la strategia di controllo del driver.
- Documenta le modifiche apportate dopo ogni iterazione.
Guarda questa immagine per un esempio di come puoi registrare i tuoi risultati.
Preparati per la sfida
In Compete (nella pagina successiva), dovrai afferrare, spostare e segnare anelli su un palo medio il più velocemente possibile giocando una partita con due run da 30 secondi, una autonoma e una con controllo del pilota, nella Split Decision Challenge. Guarda il documento e l'animazione qui sotto per scoprire come partecipare alla Split Decision Challenge. Quindi completa le domande di verifica della comprensione ed esercitati per la sfida.
L'obiettivo di questa sfida è afferrare, spostare e segnare quattro anelli su un palo di medie dimensioni nel minor tempo possibile in due manche: una utilizzando la codifica autonoma e una utilizzando il controllo del conducente.
Nel video qui sotto, il Clawbot si trova sul lato sinistro del campo. Ci sono quattro Anelli sul campo. Vicino alla parte superiore del campo, la prima tra la seconda e la terza tessera, la seconda tra la terza e la quarta tessera. Vicino al fondo del campo, il terzo tra la seconda e la terza tessera, il quarto tra la terza e la quarta tessera. C'è un singolo palo in mezzo al campo, verso il lato destro. Il video inizia con un conto alla rovescia: 3, 2, 1. Il Clawbot si sposta verso la seconda e la terza tessera, poi si sposta verso il primo Anello e lo raccoglie. Poi indietreggia e alza l'artiglio. Poi si dirige verso il palo e rilascia l'artiglio, lasciando cadere l'anello sul palo. Poi il video subisce un taglio quando tre dei quattro anelli sono al posto del palo. Il Clawbot indietreggia, abbassa l'artiglio e raccoglie il quarto Anello. Poi è passato al controllo del conducente. Il video inizia con un conto alla rovescia: 3, 2, 1. Il Clawbot si sposta verso la seconda e la terza tessera, poi si sposta verso il primo Anello e lo raccoglie. Poi indietreggia e alza l'artiglio. Poi si dirige verso il palo e rilascia l'artiglio, lasciando cadere l'anello sul palo. Poi il video subisce un taglio quando tre dei quattro anelli sono al posto del palo. Il Clawbot indietreggia e abbassa l'artiglio, cercando di raccogliere il secondo Anello, ma il tempo è scaduto. Il punteggio finale è 9 per l'Autonomous Score e 9 per il Driver Control Score, per un punteggio totale di 18.
Questo è solo un esempio di come un robot potrebbe comportarsi nell'attività di sfida Split Decision.
Segui i passaggi in questo documento per saperne di più su come completare questa attività. Google / .docx / .pdf
Controlla la tua comprensione
Prima di iniziare la sfida, assicurati di aver compreso le regole e la configurazione della sfida rispondendo alle domande nel documento sottostante sul tuo quaderno di progettazione.
Verifica la tua comprensione domande Google / .docx / .pdf
Dopo aver completato le domande, prova a mettere in pratica la sfida.
Seleziona Avanti > per partecipare alla sfida Split Decision.