
Pratique
Dans la dernière section, vous avez appris utiliser des programmes autonomes et de contrôle du conducteur pour piloter votre robot. Vous avez également appris comment télécharger plusieurs projets dans différents emplacements de l'EXP Brain et comment cela peut être utile. Maintenant, vous allez appliquer ce que vous avez appris pour compléter l’activité pratique des compétences de notation.
L'objectif de cette activité est que votre robot marque deux anneaux sur un poteau moyen en deux courses de 30 secondes : une avec contrôle du conducteur et une autre de manière autonome. Regardez la vidéo ci-dessous pour voir comment vous pouvez appliquer ce que vous avez appris pour terminer l'activité pratique des compétences de notation.
C'est maintenant votre tour de compléter l'activité pratique des compétences de notation !
Dans cette animation, le robot collecte et marque d'abord de manière autonome deux anneaux sur le poteau moyen en 30 secondes. Ensuite, il montre le parcours de contrôle du conducteur où le robot marque les deux anneaux en 30 secondes. Regardez cette animation pour voir un chemin possible que votre robot pourrait emprunter pour terminer l’activité pratique des compétences de notation.
Dans la vidéo ci-dessous, le Clawbot se trouve sur le côté gauche du terrain, face à un poteau de taille moyenne fixé au centre de la tuile de terrain, à quatre rangées du robot près du mur de droite. Il y a deux anneaux sur le terrain. Le premier est contre le mur du champ supérieur entre les deuxième et troisième tuiles, et le deuxième est directement en face du premier, contre le mur du champ inférieur. Il y a un chronomètre au-dessus du terrain réglé sur 30 secondes, ainsi qu'une icône Cerveau indiquant qu'il s'agit de la partie autonome du défi. La vidéo commence par un compte à rebours à partir de trois, et le Clawbot se déplace pour récupérer un anneau à la fois, le plaçant sur le poteau. Le chronomètre s'arrête, affichant un temps de 13:24. L'icône se transforme alors en contrôleur et le chronomètre se réinitialise, signifiant une course de contrôle du conducteur. Le Clawbot se dirige vers le poteau pour récupérer et placer les deux anneaux avec 6:04 secondes restantes sur l'horloge.
Suivez les étapes de ce document pour réaliser cette activité. Google / .docx / .pdf
Au fur et à mesure que vous terminez l’activité pratique de notation des compétences, documentez vos résultats dans votre carnet d’ingénierie.
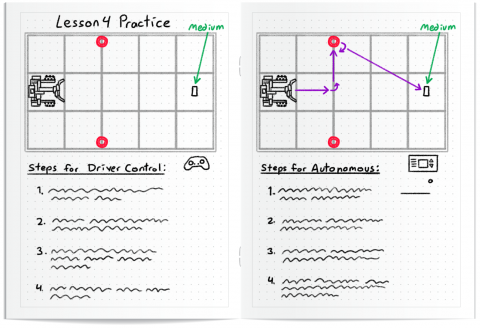
- Esquissez une image pour montrer comment votre robot doit se déplacer pour terminer chaque .
- Énumérez les étapes nécessaires pour réaliser l'activité pour les deux parcours : contrôle du conducteur et autonome.
- Au fur et à mesure que vous exécutez votre projet, prenez des notes sur la manière dont vous pourriez améliorer le code ou votre stratégie de contrôle des pilotes.
- Documentez les modifications que vous apportez après chaque itération.
Consultez cette image pour voir un exemple de la manière dont vous pouvez enregistrer vos résultats.
Préparez-vous pour le défi
Dans Compete (sur la page suivante), vous saisirez, déplacerez et marquerez des anneaux sur un poteau moyen le plus rapidement possible en jouant un match avec deux courses de 30 secondes - une autonome et une utilisant le contrôle du conducteur - dans le Split Decision Challenge. Consultez le document et l’animation ci-dessous pour savoir comment participer au Split Decision Challenge. Répondez ensuite aux questions de vérification de votre compréhension et entraînez-vous pour le défi.
L'objectif de ce défi est de saisir, de déplacer et de marquer quatre anneaux sur un poteau moyen dans le temps le plus rapide en deux courses - une en utilisant le codage autonome et une en utilisant le contrôle du conducteur.
Dans la vidéo ci-dessous, le Clawbot est sur le côté gauche du terrain. Il y a quatre anneaux sur le terrain. Près du haut du champ, le premier entre la deuxième et la troisième tuile, le deuxième entre la troisième et la quatrième tuile. Près du bas du champ, le troisième entre les deuxième et troisième tuiles, le quatrième entre les troisième et quatrième tuiles. Il y a un seul poteau au milieu du terrain, vers le côté droit. La vidéo commence par un compte à rebours : 3, 2, 1. Le Clawbot se dirige vers les deuxième et troisième tuiles, puis se déplace vers le premier anneau, le ramassant. Il recule ensuite et lève sa griffe. Ensuite, il se dirige vers le poteau et relâche la griffe, laissant l'anneau tomber sur le poteau. Ensuite, la vidéo comporte une coupure lorsque trois des quatre anneaux sont à la place du poteau. Le Clawbot recule et abaisse la griffe, ramasse le quatrième anneau. Ensuite, il est passé au contrôle du conducteur. La vidéo commence par un compte à rebours : 3, 2, 1. Le Clawbot se dirige vers les deuxième et troisième tuiles, puis se déplace vers le premier anneau, le ramassant. Il recule ensuite et lève sa griffe. Ensuite, il se dirige vers le poteau et relâche la griffe, laissant l'anneau tomber sur le poteau. Ensuite, la vidéo comporte une coupure lorsque trois des quatre anneaux sont à la place du poteau. Le Clawbot recule et abaisse la griffe, essayant de ramasser le deuxième anneau, mais le temps est écoulé. Le score final est le score autonome 9 et le score de contrôle du conducteur 9 avec un score total de 18.
Ceci n’est qu’un exemple de la manière dont un robot pourrait se comporter dans l’activité de défi de décision partagée.
Suivez les étapes décrites dans ce document pour en savoir plus sur la manière de réaliser cette activité. Google / .docx / .pdf
Vérifiez votre compréhension
Avant de commencer le défi, assurez-vous de bien comprendre les règles et la configuration du défi en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Questions de vérification de votre compréhension Google / .docx / .pdf
Après avoir répondu aux questions, essayez de pratiquer le défi.
Sélectionnez Suivant > pour participer au défi Split Decision.