
Oefening
In het vorige gedeelte hebt u geleerd hoe u uw robot kunt besturen met behulp van autonome programma's en Driver Control-programma's. Je hebt ook geleerd hoe je meerdere projecten naar verschillende slots op de EXP Brain kunt downloaden en hoe handig dit kan zijn. Nu gaat u toepassen wat u hebt geleerd om de oefening 'Scorevaardigheden' af te ronden.
Het doel van deze activiteit is om met je robot twee ringen te scoren op een middelgrote paal in twee runs van 30 seconden: één run met de bestuurder en één run autonoom. Bekijk de onderstaande video om te zien hoe u kunt toepassen wat u hebt geleerd om de oefening 'Scorevaardigheden' te voltooien.
Nu is het jouw beurt om de oefening 'Scorevaardigheden' te voltooien!
In deze animatie verzamelt en scoort de robot eerst autonoom twee ringen op de medium paal in 30 seconden. Vervolgens wordt de driver control run getoond, waarbij de robot beide ringen in 30 seconden scoort. Bekijk deze animatie om een mogelijk pad te zien dat uw robot kan volgen om de oefening 'Scorevaardigheden' te voltooien.
In de onderstaande video bevindt de Clawbot zich aan de linkerkant van het veld, met zijn gezicht naar een middelgrote paal die in het midden van de veldtegel is bevestigd, vier rijen verwijderd van de robot, bij de rechtermuur. Er liggen twee ringen op het veld. De eerste bevindt zich tegen de bovenste veldmuur, tussen de tweede en derde tegel, en de tweede bevindt zich direct tegenover de eerste, tegen de onderste veldmuur. Boven het veld hangt een stopwatch die op 30 seconden is ingesteld. Het icoontje van het brein geeft aan dat dit het autonome deel van de uitdaging is. De video begint met een aftelling vanaf drie, waarna de Clawbot één voor één de ringen pakt en ze op de paal plaatst. De stopwatch stopt en geeft een tijd van 13:24 aan. Het pictogram verandert vervolgens in een controller en de stopwatch wordt gereset, wat aangeeft dat de bestuurder een run onder controle heeft. De Clawbot probeert beide ringen op te pakken en plaatst ze op de paal, met nog 6:04 seconden op de klok.
Volg de stappen in dit document om deze activiteit te voltooien. Google / .docx / .pdf
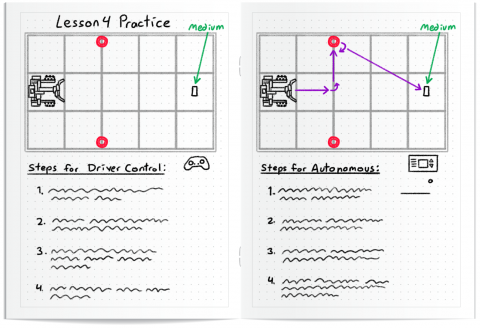
Noteer uw bevindingen in uw technisch notitieboekje terwijl u de oefening 'Scorevaardigheden' uitvoert.
- Maak een schets van hoe uw robot moet bewegen om elke proef te voltooien.
- Maak een lijst van de stappen die nodig zijn om de activiteit voor beide runs uit te voeren: bestuurdersbesturing en autonoom.
- Maak tijdens de uitvoering van uw project aantekeningen over hoe u de code of uw driver-controlstrategie kunt verbeteren.
- Documenteer de wijzigingen die u na elke iteratie aanbrengt.
Bekijk deze afbeelding voor een voorbeeld van hoe u uw resultaten kunt vastleggen.
Bereid je voor op de uitdaging
In Compete (op de volgende pagina) moet je zo snel mogelijk ringen op een middelgrote paal grijpen, verplaatsen en scoren door een wedstrijd te spelen met twee runs van 30 seconden - één autonoom en één met besturing door een driver - in de Split Decision Challenge. Bekijk het document en de animatie hieronder om te leren hoe je kunt deelnemen aan de Split Decision Challenge. Beantwoord vervolgens de vragen om uw begrip te controleren en oefen voor de uitdaging.
Het doel van deze uitdaging is om in twee runs zo snel mogelijk vier ringen op een middelgrote paal te pakken, te verplaatsen en te scoren: één run met autonome codering en één met besturing van de bestuurder.
In de onderstaande video bevindt de Clawbot zich aan de linkerkant van het veld. Er staan vier ringen op het veld. Bovenaan het veld, de eerste tussen de tweede en derde tegel, de tweede tussen de derde en vierde tegel. Onderaan het veld bevindt zich de derde tussen de tweede en derde tegel, en de vierde tussen de derde en vierde tegel. Er staat een enkele paal in het midden van het veld, aan de rechterkant. De video begint met een aftelling: 3, 2, 1. De Clawbot rijdt naar de tweede en derde tegel en beweegt zich vervolgens omhoog naar de eerste Ring, waar hij deze oppakt. Vervolgens gaat het dier achteruit en steekt zijn klauw omhoog. Vervolgens rijdt hij naar de paal en laat de klauw los, zodat de ring op de paal valt. Vervolgens wordt de video onderbroken wanneer drie van de vier ringen op de plaats van de paal staan. De Clawbot loopt achteruit, laat de klauw zakken en pakt de vierde Ring op. Daarna ging het over op de run waarbij de bestuurder de controle had. De video begint met een aftelling: 3, 2, 1. De Clawbot rijdt naar de tweede en derde tegel en beweegt zich vervolgens omhoog naar de eerste Ring, waar hij deze oppakt. Vervolgens gaat het dier achteruit en steekt zijn klauw omhoog. Vervolgens rijdt hij naar de paal en laat de klauw los, zodat de ring op de paal valt. Vervolgens wordt de video onderbroken wanneer drie van de vier ringen op de plaats van de paal staan. De Clawbot doet een stap achteruit en laat de klauw zakken in een poging de tweede Ring te pakken, maar de tijd is om. De eindscore is Autonomous Score 9 en de Driver Control Score 9, met een totaalscore van 18.
Dit is slechts één voorbeeld van hoe een robot zou kunnen presteren in de Split Decision-uitdaging.
Volg de stappen in dit document voor meer informatie over het voltooien van deze activiteit. Google / .docx / .pdf
Controleer uw begrip
Voordat u aan de uitdaging begint, moet u ervoor zorgen dat u de regels en de opzet van de uitdaging begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen Google / .docx / .pdf
Nadat u de vragen hebt beantwoord, kunt u de uitdaging oefenen.
Selecteer Volgende > om deel te nemen aan de Split Decision-uitdaging.