
Compete
In this lesson, you learned about using autonomous and Driver Control programs to drive your robot to collect and score rings and learned how and why to use multiple program slots in VEXcode EXP. You practiced optimizing your strategy for both driver control and autonomous movements, and now you are ready to apply what you've learned to the Split Decision Challenge!
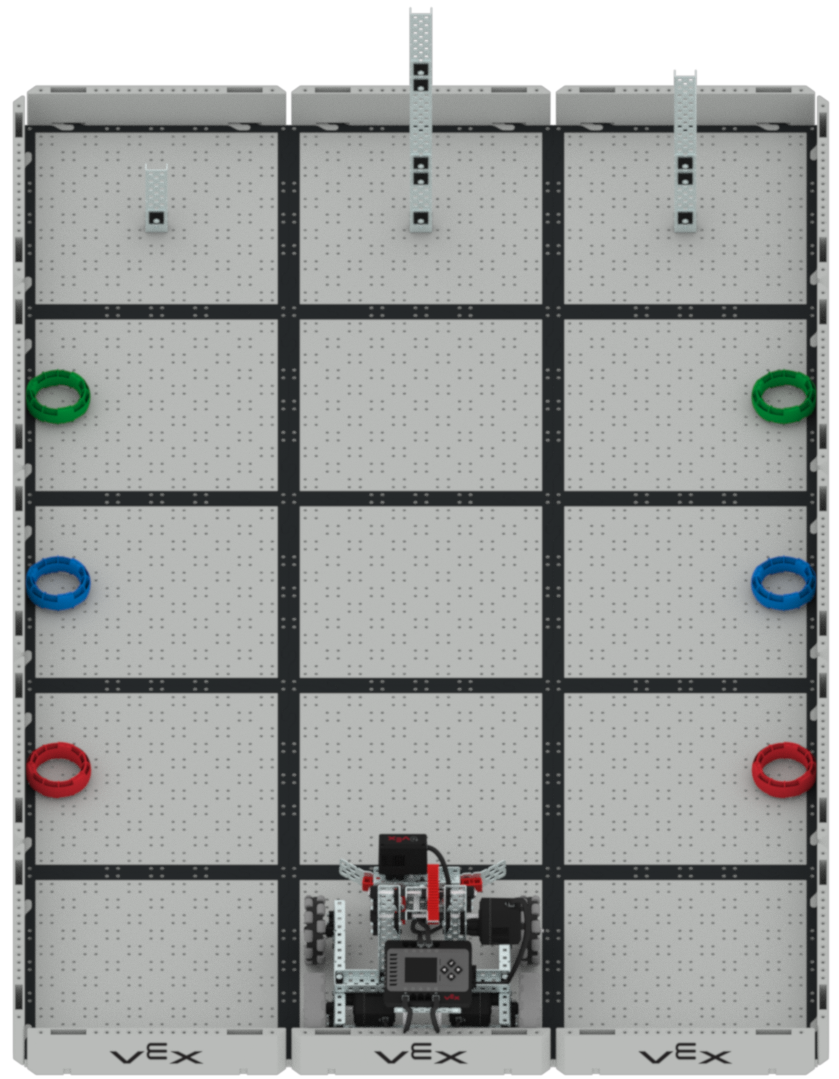
The goal of this challenge is to achieve the highest score by grabbing, moving and scoring four rings on a medium post in two 30-second runs. One run will be driver control, and the other autonomous. The animation below shows how the Field should be set up, and how the two runs are played and scored. The robot that gets the most points wins.
In the video below, the Clawbot is on the left side of the field, facing a middle-sized post attached in the center of the Field Tile four rows away from the robot near the right wall. There are four Rings on the field. The first one is against the top Field Wall between the second and third tiles, and the second one is against the top Field wall between the third and fourth Tiles. The third and fourth Rings are placed directly opposite the first and second, against the bottom Field wall. There is a stopwatch above the Field set at 30 seconds, along with a Brain icon showing that this is the autonomous part of the challenge. The video starts with a countdown from three. The Clawbot moves to pick up Rings and place them on the post, and scores three of the four before time is up, for an autonomous score of 9. The driver control run starts with a countdown: 3, 2, 1. The Clawbot drives to pick up and place Rings on the post, scoring 3 before time is up. The final autonomous score is 9, and the final driver control score is 9 with a total score of 18
Follow the steps in this document to complete the Split Decision Challenge. Google / .docx / .pdf
Once you have completed the Split Decision Challenge, check in with your teacher. Ensure you have documented the results of the challenge in your engineering notebook.
Wrap Up Reflection
Now that you have created a strategy and competed in the Split Decision Challenge, it is time to reflect on what you have learned and done in this Lesson. Start a new page in your engineering notebook to begin your reflection.
Rate yourself as a novice, apprentice, or expert on each of the following concepts in your engineering notebook. Provide a brief explanation for why you gave yourself that rating for each concept:
- Applying my knowledge of custom driver control on the EXP Brain and in VEXcode EXP to code my robot to get the highest possible score in the Split Decision Challenge
- Planning and executing a project that has my robot complete the Split Decision Challenge autonomously
- Using multiple project slots on the EXP Brain in order to get the highest possible score in the Split Decision Challenge
- Collaborating with my team members to create an overall strategy for the Split Decision Challenge
Use this table to help you determine which category you fall under.
| Expert | I feel that I fully understood the concept and could teach this to someone else. |
| Apprentice | I feel that I understood the concept enough to compete in the challenge. |
| Novice | I feel that I did not understand the concept and do not know how to complete the challenge. |
What is Next?
In this lesson, you learned about customizing driver control, and how to plan and code your robot to move autonomously. You practiced developing a strategy for completing activities using driver control and autonomously. You also learned how, and why to use multiple program slots in VEXcode EXP. Now it is time to compete in the Ring Leader Competition!
In the next Lesson, you will:
- Go over the rules of the competition
- Develop a game strategy
- Compete in the Ring Leader Competition!
Select < Return to Lessons to go back to the Lesson Overview.
Select Next Lesson > to continue to Lesson 5 and learn how to participate in the Ring Leader Competition!