
관행
지난 섹션에서는 자율 주행 및 운전자 제어 프로그램을 사용하여 로봇을 운전하는 방법을 알아보았습니다. 또한 EXP Brain의 여러 슬롯에 여러 프로젝트를 다운로드하는 방법과 이것이 어떻게 유용한지 알아보았습니다. 이제 여러분은 채점 기술 연습 활동을 완료하기 위해 배운 내용을 적용하게 될 것입니다.
이 활동의 목표는 로봇이 30초 동안 두 번(한 번은 운전자 제어, 한 번은 자율 주행) 달려 중간 크기의 기둥에 두 개의 링을 꽂는 것입니다. 아래 영상을 시청하여 채점 기술 연습 활동을 완료하기 위해 학습한 내용을 어떻게 적용할 수 있는지 알아보세요.
이제 채점 기술 연습 활동을 완료할 차례입니다!
이 애니메이션에서 로봇은 먼저 30초 안에 중간 기둥에 두 개의 링을 자율적으로 수집하고 점수를 매깁니다. 그런 다음 로봇이 30초 안에 두 개의 링을 모두 획득하는 드라이버 제어 실행을 보여줍니다. 로봇이 채점 기술 연습 활동을 완료하기 위해 취할 수 있는 가능한 경로를 확인하려면 이 애니메이션을 시청하세요.
아래 영상에서 클로봇은 필드 타일 중앙에 부착된 중간 크기의 기둥을 바라보며 필드 왼쪽에 있고, 오른쪽 벽 근처 로봇에서 4줄 떨어져 있습니다. 경기장에는 두 개의 링이 있습니다. 첫 번째는 두 번째와 세 번째 타일 사이의 위쪽 필드 벽에 붙어 있고, 두 번째는 첫 번째와 바로 반대편, 아래쪽 필드 벽에 붙어 있습니다. 필드 위에는 30초로 설정된 스톱워치가 있고, 이것이 도전 과제의 자율적인 부분임을 나타내는 뇌 아이콘이 있습니다. 영상은 3부터 카운트다운으로 시작하며, 클로봇은 한 번에 하나의 링을 집어 들고 기둥에 놓습니다. 스톱워치가 멈추고 13:24를 가리킨다. 그러면 아이콘이 컨트롤러로 전환되고 스톱워치가 재설정되어 드라이버 컨트롤 실행이 시작됩니다. 클로봇은 시계에 남은 시간이 6분 04초인 상황에서 두 개의 링을 집어 올려 골대에 올려놓았습니다.
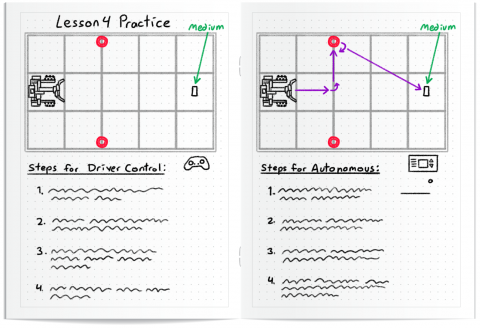
채점 기술 연습 활동을 완료하면 엔지니어링 노트북에 조사 결과를 기록하세요.
- 로봇이 각 시험을 완료하기 위해 어떻게 움직여야 하는지 보여주는 그림을 스케치하세요.
- 운전자 제어와 자율 주행의 두 가지 실행에 대한 활동을 완료하는 데 필요한 단계를 나열하세요.
- 프로젝트를 실행하면서 코드나 드라이버 제어 전략을 개선할 수 있는 방법을 메모해 두세요.
- 각 반복 작업 후에 변경한 내용을 문서화하세요.
결과를 기록하는 방법에 대한 예를 보려면 이 이미지를 보세요.
도전에 대비하세요
다음 페이지의 경쟁에서, 여러분은 두 번의 30초 달리기(한 번은 자율 주행, 한 번은 운전자 제어)로 구성된 Split Decision Challenge에서 가능한 한 빨리 중간 기둥에 링을 잡고 옮기고 점수를 획득해야 합니다. 아래의 문서와 애니메이션을 시청하여 Split Decision Challenge에 참가하는 방법을 알아보세요. 그런 다음 이해도 확인 질문을 완료하고 도전 과제를 연습하세요.
이 챌린지의 목표는 두 번의 시도(한 번은 자율 코딩을 사용하고, 다른 한 번은 운전자 제어를 사용)에서 가장 빠른 시간 안에 중간 막대에 있는 4개의 링을 잡고, 옮기고, 점수를 매기는 것입니다.
아래 영상에서는 클로봇이 필드 왼쪽에 있습니다. 경기장에는 4개의 링이 있습니다. 필드의 위쪽에 있는 첫 번째 타일은 두 번째와 세 번째 타일 사이에 있고, 두 번째 타일은 세 번째와 네 번째 타일 사이에 있습니다. 필드 아래쪽에 있는 세 번째 타일은 두 번째와 세 번째 타일 사이에 있고, 네 번째 타일은 세 번째와 네 번째 타일 사이에 있습니다. 필드 중앙, 오른쪽에 기둥 하나가 있습니다. 영상은 카운트다운으로 시작합니다: 3, 2, 1. 클로봇은 두 번째와 세 번째 타일로 이동한 다음 첫 번째 링을 향해 이동하여 링을 집어 올립니다. 그런 다음 뒤로 물러나서 발톱을 들어 올립니다. 그다음 기둥으로 달려가 발톱을 놓아 반지가 기둥 위로 떨어지게 합니다. 그런 다음 영상은 4개의 링 중 3개가 기둥 자리에 있는 장면으로 전환됩니다. 클로봇은 뒤로 물러나서 집게발을 내리고 네 번째 반지를 집어올렸다. 그런 다음 운전자 제어 실행으로 전환되었습니다. 영상은 카운트다운으로 시작합니다: 3, 2, 1. 클로봇은 두 번째와 세 번째 타일로 이동한 다음 첫 번째 링을 향해 이동하여 링을 집어 올립니다. 그런 다음 뒤로 물러나서 발톱을 들어 올립니다. 그다음 기둥으로 달려가 발톱을 놓아 반지가 기둥 위로 떨어지게 합니다. 그런 다음 영상은 4개의 링 중 3개가 기둥 자리에 있는 장면으로 전환됩니다. 클로봇은 뒤로 물러나 집게발을 내리고 두 번째 반지를 집으려고 하지만 시간이 부족합니다. 최종 점수는 자율주행 점수 9점, 운전자 제어 점수 9점으로 총점은 18점입니다.
이는 로봇이 분할 결정 챌린지 활동에서 어떤 성과를 낼 수 있는지 보여주는 한 가지 예일 뿐입니다.
이 활동을 완료하는 방법에 대해 자세히 알아보려면 이 문서의 단계를 따르세요. Google / .docx / .pdf