
Lên và xuống
6 Những bài học
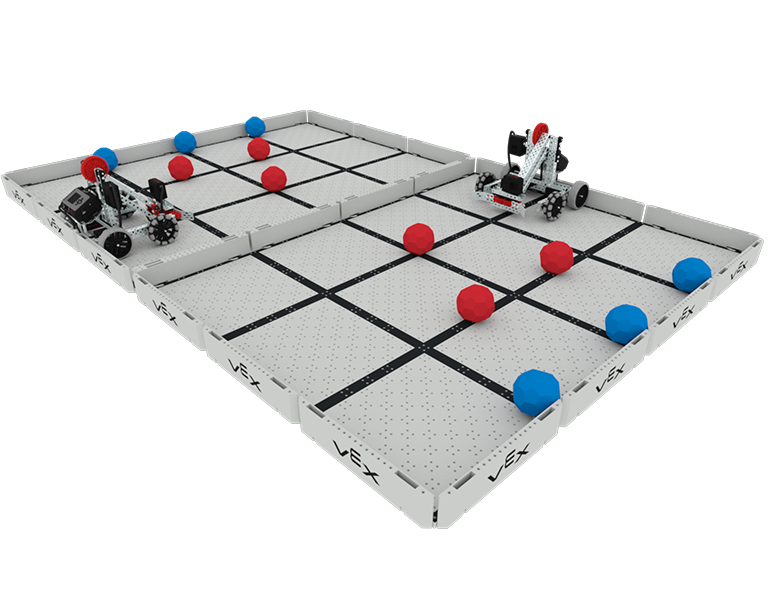
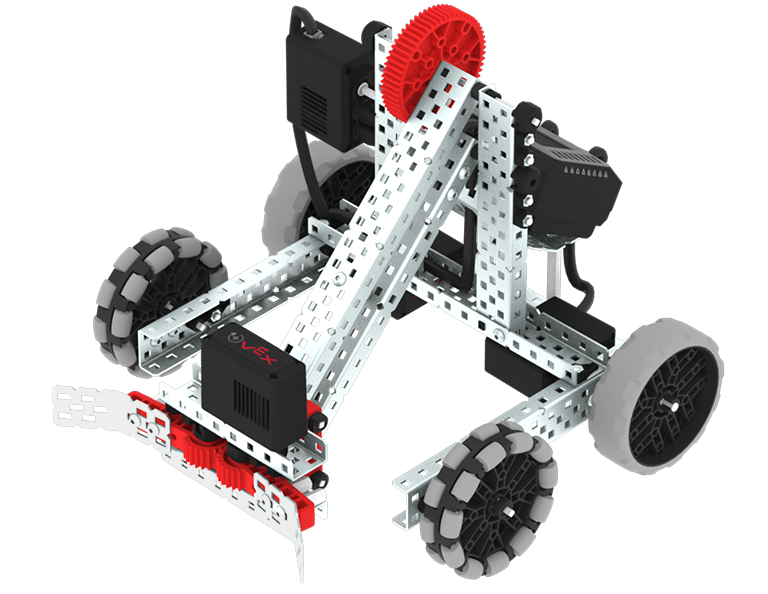
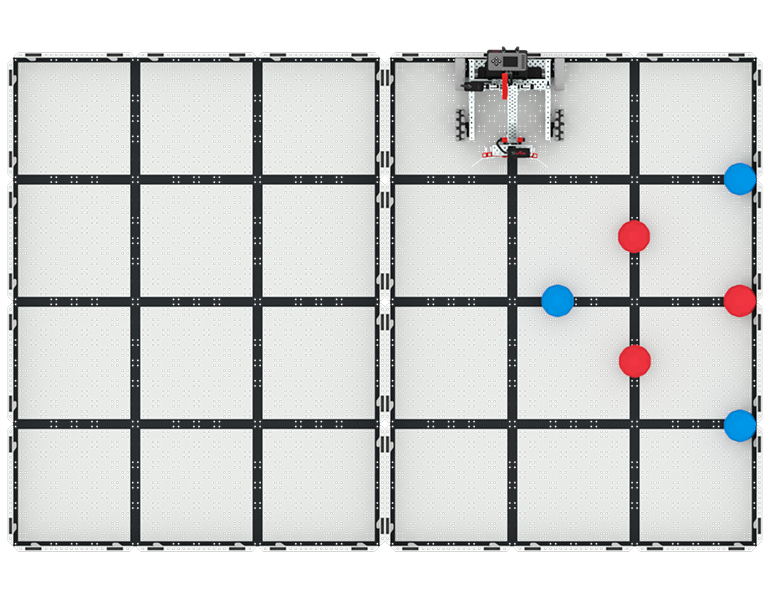
Trong bài học này, bạn sẽ tìm hiểu cách thiết kế một robot gắp (Clawbot) để thu thập, nhặt và di chuyển các quả bóng Buckyball từ bên này sang bên kia sân đấu trong cuộc thi "Vượt qua chướng ngại vật"!
Hãy truy cập Cổng thông tin dành cho giáo viên để xem các tài liệu và video hỗ trợ giáo viên về nội dung cũng như cách hỗ trợ các Bài học nâng cao.
Bài 1: Giới thiệu
Trong bài học này, bạn sẽ được giới thiệu về cuộc thi Up and Over, thiết lập pin và bộ điều khiển, chuẩn bị lập trình và chế tạo robot gắp thú.
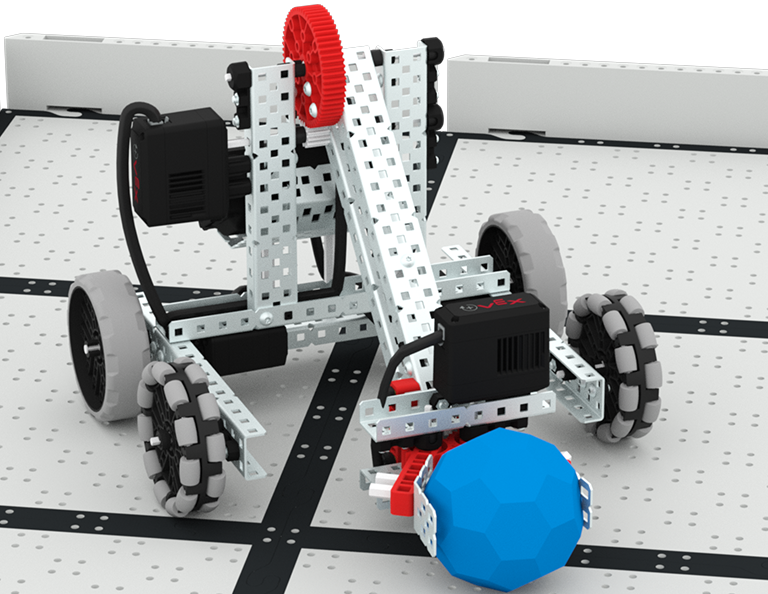
Bài học 2: Thiết kế móng vuốt
Trong bài học này, bạn sẽ tìm hiểu móng vuốt là gì, móng vuốt hiệu quả hoạt động như thế nào và việc trinh sát có thể mang lại lợi ích gì cho kế hoạch và chiến lược của đội bạn. Tiếp theo, bạn sẽ áp dụng những gì đã học vào thử thách "Lấy và đi".
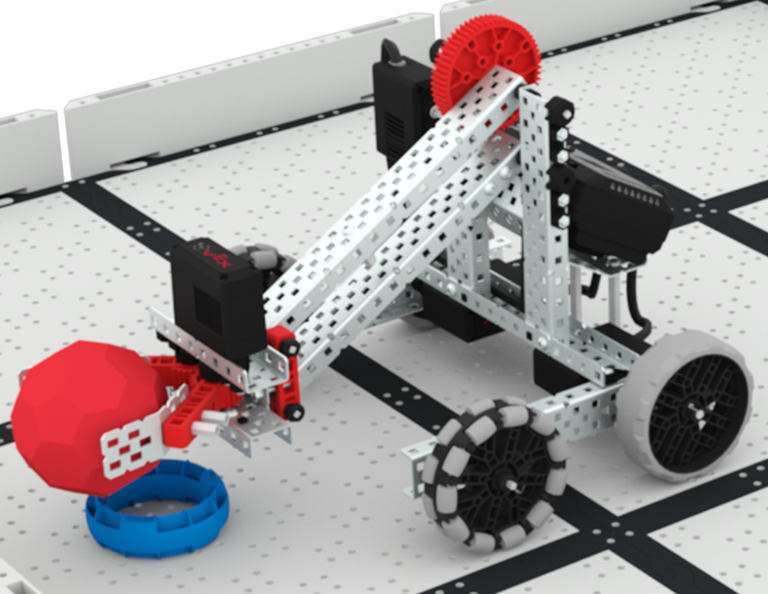
Bài học 3: Các kiểu thiết kế cánh tay
Trong bài học này, bạn sẽ tìm hiểu về các thành phần khác nhau của cánh tay robot, bao gồm cách chúng hoạt động và những yếu tố tạo nên một thiết kế cánh tay robot hiệu quả. Tiếp theo, bạn sẽ thiết kế và chế tạo một cánh tay cho robot của mình để xếp các quả Buckyball thành vòng tròn cho thử thách Xếp chồng.
Bài học 4: Các nhóm cơ
Trong bài học này, bạn sẽ tìm hiểu nhóm động cơ là gì, chúng có thể hữu ích như thế nào và cách cấu hình nhóm động cơ trong VEXcode EXP để cải tiến robot của bạn và hoàn thành thử thách "Lên và Vượt".
Bài học 5: Cuộc thi vượt chướng ngại vật
Trong bài học này, bạn sẽ áp dụng những kiến thức đã học từ các bài trước để tham gia cuộc thi "Vượt chướng ngại vật"!

Bài học 6: Kết luận
Trong Bài học này, bạn sẽ suy ngẫm về Đơn vị và xác định mối liên hệ giữa những gì bạn đã làm và sự nghiệp STEM.