
Chơi
Phần 1 - Từng bước một
- Hướng dẫnHướng dẫn học sinh cách kết nối không dây robot Code Base với thiết bị của mình. Để bắt đầu, mỗi nhóm cần có một thiết bị, phần mềm VEXcode GO và một robot Code Base đã được chế tạo.
VEXcode GO - Mô hìnhMô hình cách khởi chạy VEXcode GO trên thiết bị và các bước để kết nối thiết bị với robot Code Base.
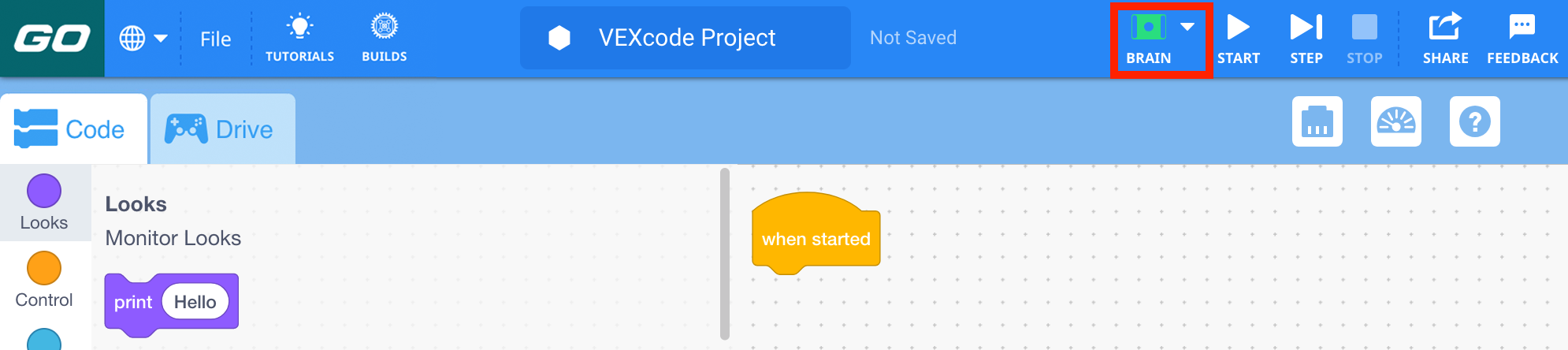
Thực hiện theo các bước trong bài viết Kết nối Thư viện VEX GO Brain VEX để thiết bị của bạn kết nối với robot Code Base. Làm mẫu cho học sinh cách kiểm tra để đảm bảo robot Code Base của mình đã được kết nối thành công, bằng cách xem biểu tượng Não màu trên thanh công cụ.
Lưu ý: Khi bạn kết nối Code Base với thiết bị lần đầu tiên, Gyro tích hợp trong Brain có thể hiệu chỉnh, khiến Code Base tự động di chuyển trong giây lát. Đây là hành vi dự kiến, không chạm vào Cơ sở mã trong khi đang hiệu chỉnh.
Kết nối não GO - Hỗ trợHỗ trợ thảo luận khi học sinh kết nối thiết bị của mình với VEXcode GO bằng cách hỏi những câu hỏi sau:
- Làm sao để biết thiết bị của bạn đã được kết nối thành công?
- Biểu tượng Não ở đâu trên Thanh công cụ?
- Bước đầu tiên để kết nối thiết bị không dây là gì?
Kết nối với Cơ sở mã
- Nhắc nhởNhắc nhở học sinh rằng việc học các khái niệm mới có thể phải thử nhiều lần và khuyến khích các em thử lại nếu không thành công khi kết nối thiết bị trong lần thử đầu tiên.
- HỏiYêu cầu học sinh suy nghĩ về cách sử dụng robot để hoàn thành các công việc trong cuộc sống thực tế bẩn thỉu, nhàm chán hoặc nguy hiểm. Tại sao sử dụng robot để làm những công việc này lại tốt hơn con người? Bạn có thể nghĩ đến công việc nào mà robot có thể làm hết mọi việc không? Còn những công việc mà con người và robot cùng làm việc thì sao?
Nghỉ giải lao giữa giờ & Thảo luận nhóm
Ngay khi mỗi nhóm kết nối thành công robot Code Base của mình với thiết bị, hãy tập hợp lại để có cuộc trò chuyện ngắn .
- Bước đầu tiên để kết nối không dây robot Code Base với thiết bị của bạn là gì?
- Làm sao để biết kết nối không dây của tôi có thành công không?
- Nếu bạn phải giải thích cho một người bạn bằng lời nói và cử chỉ về cách kết nối robot Code Base với một thiết bị, bạn sẽ nói gì?
- Bạn có gặp khó khăn gì khi kết nối không? Nếu vậy, bạn đã vượt qua nó như thế nào?
Phần 2 - Từng bước một
- Hướng dẫnHướng dẫn học sinh rằng bây giờ các em sẽ khám phá cách điều khiển robot Code Base chuyển động! Để bắt đầu, mỗi nhóm cần có một thiết bị, phần mềm VEXcode GO và một robot Code Base đã được chế tạo.
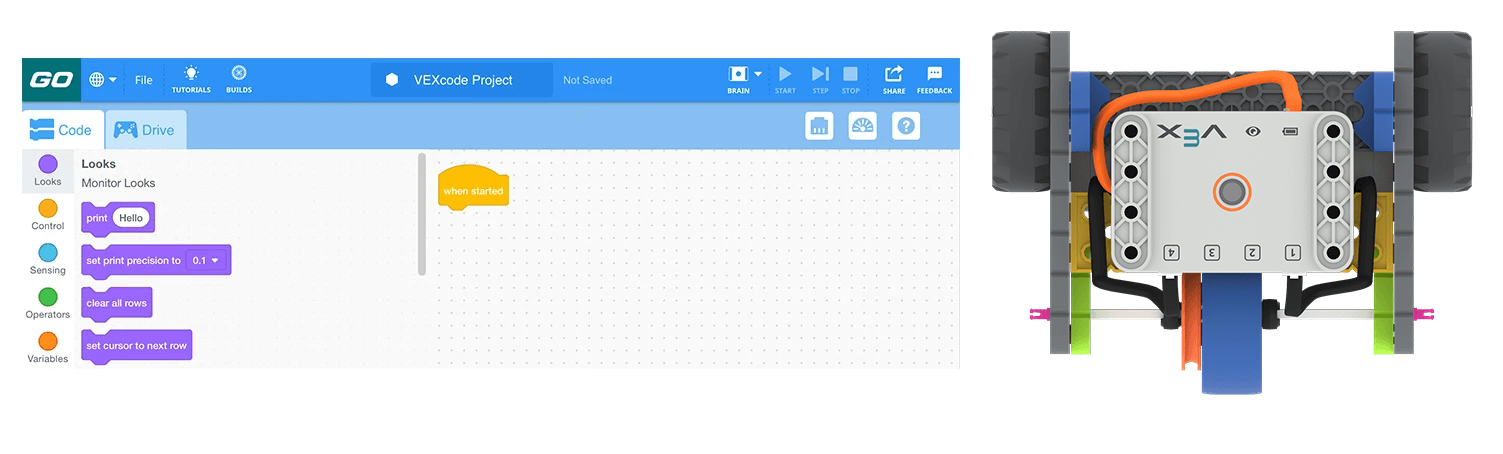
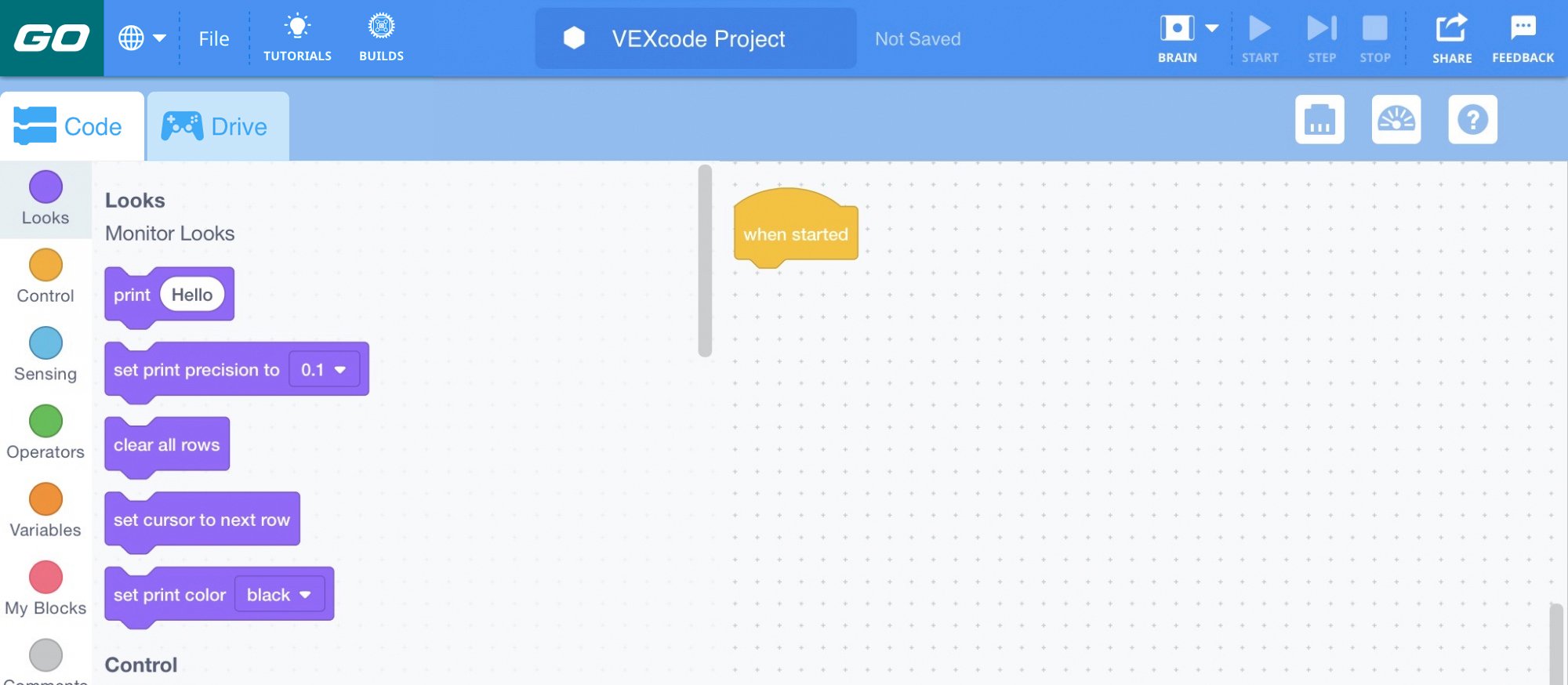
Sử dụng VEXcode GO với Cơ sở mã - Mô hìnhMô hình dành cho sinh viên cách mở và lưu dự án của mình cũng như cấu hình Cơ sở mã trong VEXcode GO.
Làm mẫu các bước trong bài viết Mở và lưu dự ánThư viện VEX cho thiết bị của bạn và yêu cầu họ làm theo các bước để mở và lưu dự án của mình. Yêu cầu học sinh đặt tên cho dự án của mìnhDrive.

Đặt tên cho dự án Drive Sau khi đặt tên cho dự án của mình, học sinh cần làm theo các bước để cấu hình cho Cơ sở mã. Làm mẫu các bước từ bài viết Cấu hình cơ sở mãThư viện VEX và đảm bảo học viên có thể nhìn thấy các khối Truyền động trong Hộp công cụ.
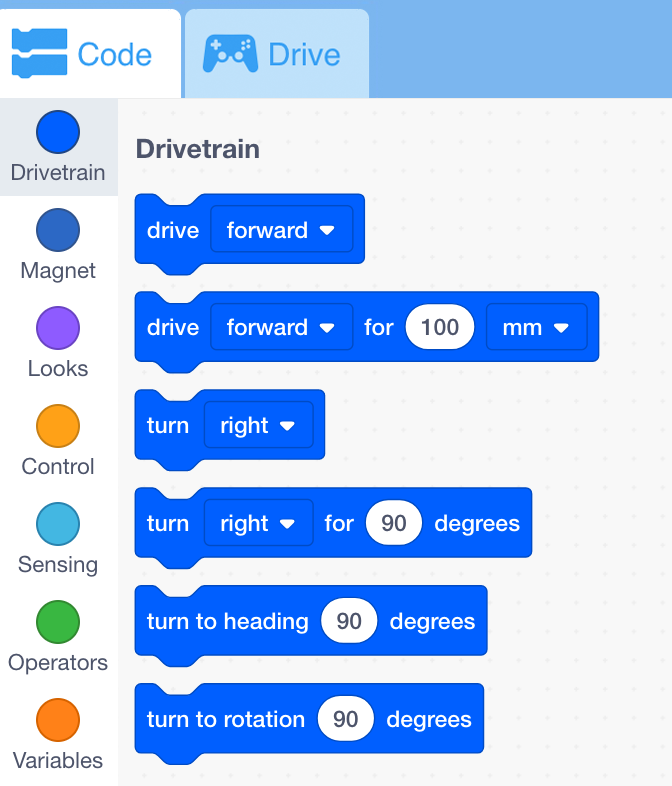
Hiển thị cách kéo khối [Drive for] vào Không gian làm việc và đặt nó bên dưới khối {When started}.
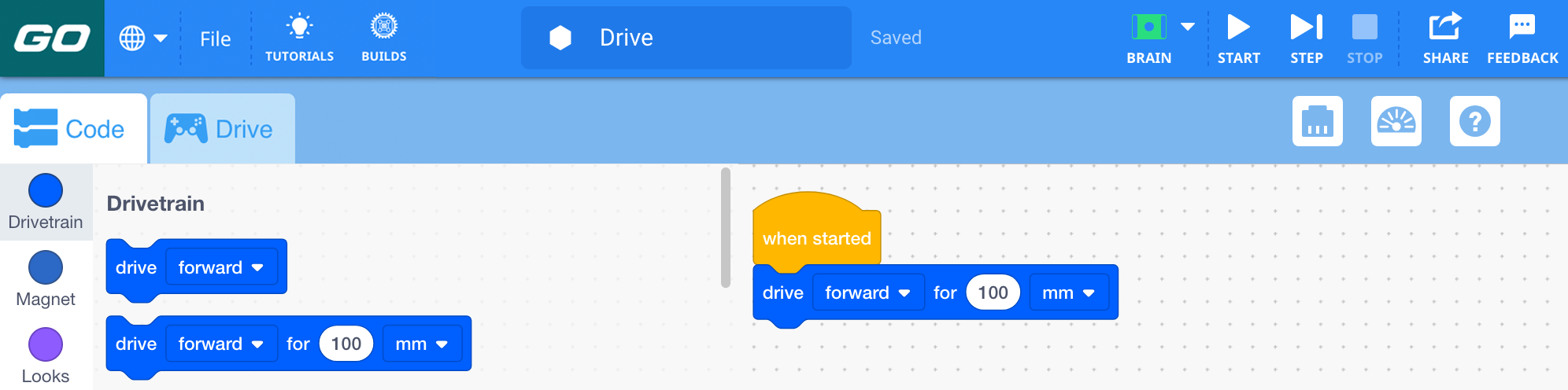
Thêm khối [Drive for] Mô hình cho học sinh cách bắt đầu dự ánkiểm tra dự án.
- Thúc đẩyThúc đẩy một cuộc thảo luận khi học sinh đang tạo và bắt đầu dự án của mình bằng cách hỏi những câu hỏi sau:
- Tôi có thể tìm khối [Drive for] ở đâu trong VEXcode GO?
- Làm thế nào để thêm khối vào dự án của tôi?
- Trước khi bắt đầu dự án, bạn mong đợi Code Base sẽ thực hiện những gì?
- Bạn có gặp phải thách thức nào khi tạo và bắt đầu dự án của mình không? Nếu vậy, bạn đã vượt qua chúng như thế nào?

Thảo luận về việc sử dụng VEXcode GO - Nhắc nhởNhắc nhở học sinh rằng việc học các khái niệm mới có thể phải thử nhiều lần và khuyến khích các em thử lại nếu không thành công khi điều khiển rô-bốt Code Base tiến về phía trước trong lần thử đầu tiên.
- HỏiYêu cầu học sinh suy nghĩ về công việc hoặc nhiệm vụ mà robot Code Base có thể hoàn thành bằng cách di chuyển về phía trước. Liệu nó có thể cung cấp thuốc cho bệnh nhân trong bệnh viện không? Nó có thể giao hàng được không? Có thể lái xe đến nơi nào đó quá nguy hiểm hoặc quá nhỏ đối với con người không? Yêu cầu học sinh đưa ra ít nhất hai tình huống hoặc công việc mà các em có thể sử dụng robot Code Base để hoàn thành một nhiệm vụ.
Tùy chọn: Nếu có thể, hãy giữ lại Cơ sở mã được lắp ráp cho các Phòng thí nghiệm khác trong Đơn vị này.